机器人
2015-12-28
机器人
·编者按·
21世纪以来,国内外对机器人技术的发展越来越重视。机器人技术被认为是对未来新兴产业发展具有重要意义的高技术之一。英国皇家工程学院2009年在《自主系统》的科学报告中预测,2019年将迎来机器人革命,习近平总书记2014年在中国科学院第十七次院士大会、中国工程院第十二次院士大会上的讲话中强调,机器人的研发、制造与应用是衡量一个国家科技创新和高端制造业水平的重要标志,不仅要提高我国机器人水平,还要尽可能多地占领市场。
机器人(Robot)是自动执行工作的机器装置,它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。联合国标准化组织采纳了美国机器人协会给机器人下的定义:“一种可编程和多功能的操作机;或是为了执行不同的任务而具有可用电脑改变和可编程动作的专门系统。一般由执行机构、驱动装置、检测装置和控制系统及复杂机械等组成。”机器人是综合了机械、电子、计算机、传感器、控制技术、人工智能、仿生学等多种学科的复杂智能机械,目前已成为世界各国的研究热点之一,成为衡量一国工业化水平的重要标志。
机器人可大致分为工业机器人和服务机器人。在工业机器人方面,国外的研究起步较早,发展较为成熟。其中以美国、日本和欧洲为代表,他们根据各自生产力发展的需要,研制了各种各样的机器人。我国机器人的研究制造以工业机器人为主,始于20世纪70年代,发展较为迅速。在服务机器人方面,特别是具有情感和智能的机器人研制领域,各国还没有明显的差距。机器人技术最早应用于工业领域,但随着机器人技术的发展和各行业需求的提升,在计算机技术、网络技术、MEMS技术等新技术发展的推动下,机器人技术正从传统的工业制造领域向医疗服务、教育娱乐、勘探勘测、生物工程、救灾救援等领域迅速扩展,适应不同领域需求的机器人系统被深入研究和开发。过去几十年,机器人技术的研究与应用,大大推动了人类的工业化和现代化进程,并逐步形成了机器人的产业链,使机器人的应用范围也日趋广泛。近年来,我国机器人技术的研究取得了大量成果,机器人产品的市场前景广阔。
本专题得到了任福继(日本德岛大学教授)、蔡自兴(中南大学教授、国际导航与运动控制科学院院士、纽约科学院院士)的大力支持。
·热点数据排行·
截至2015年9月25日,中国知网(CNKI)和Web of Science(WOS)的数据报告显示,以“机器人(Robot)”为词条检索到的期刊文献分别为19345为与20750条,本专题将相关数据按照:研究机构发文数、作者发文数、期刊发文数、被引用频次进行排行,结果如下。
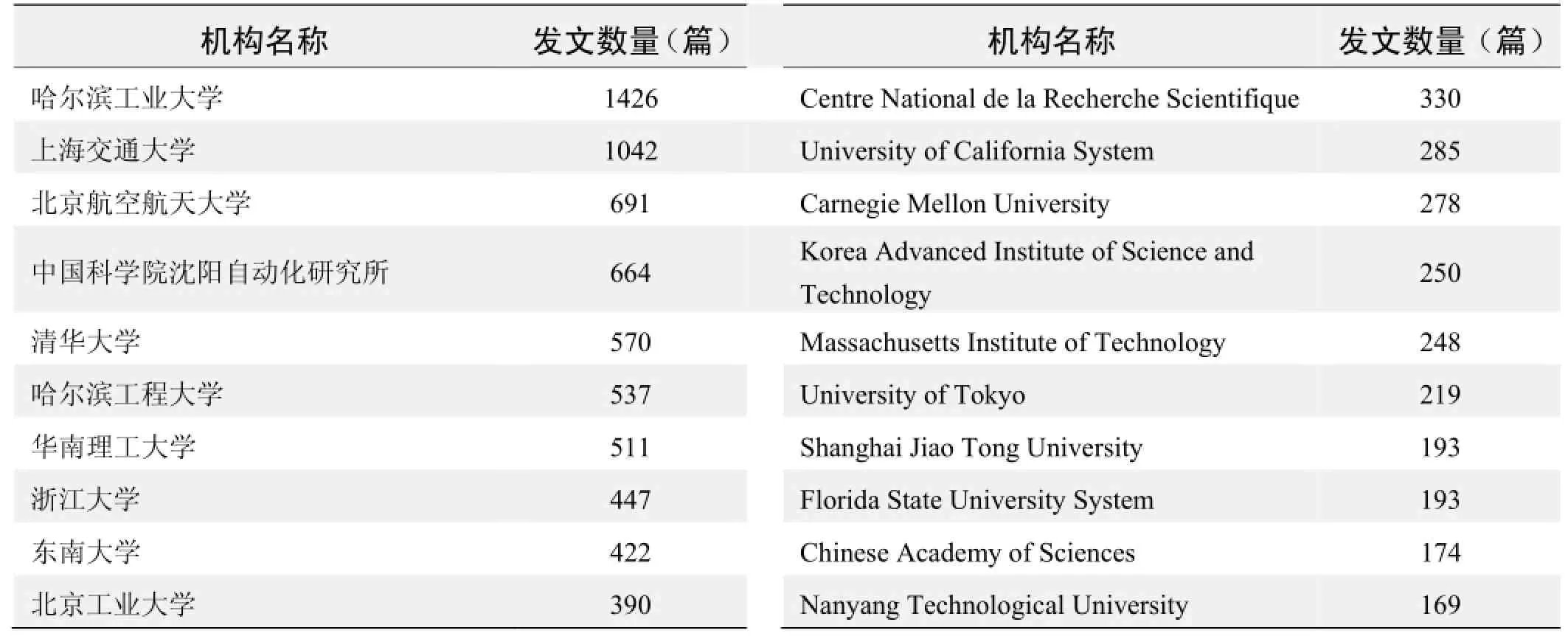
研究机构发文数量排名(CNKI) 研究机构发文数量排名(WOS)

作者发文数量排名(CNKI) 作者发文数量排名(WOS)
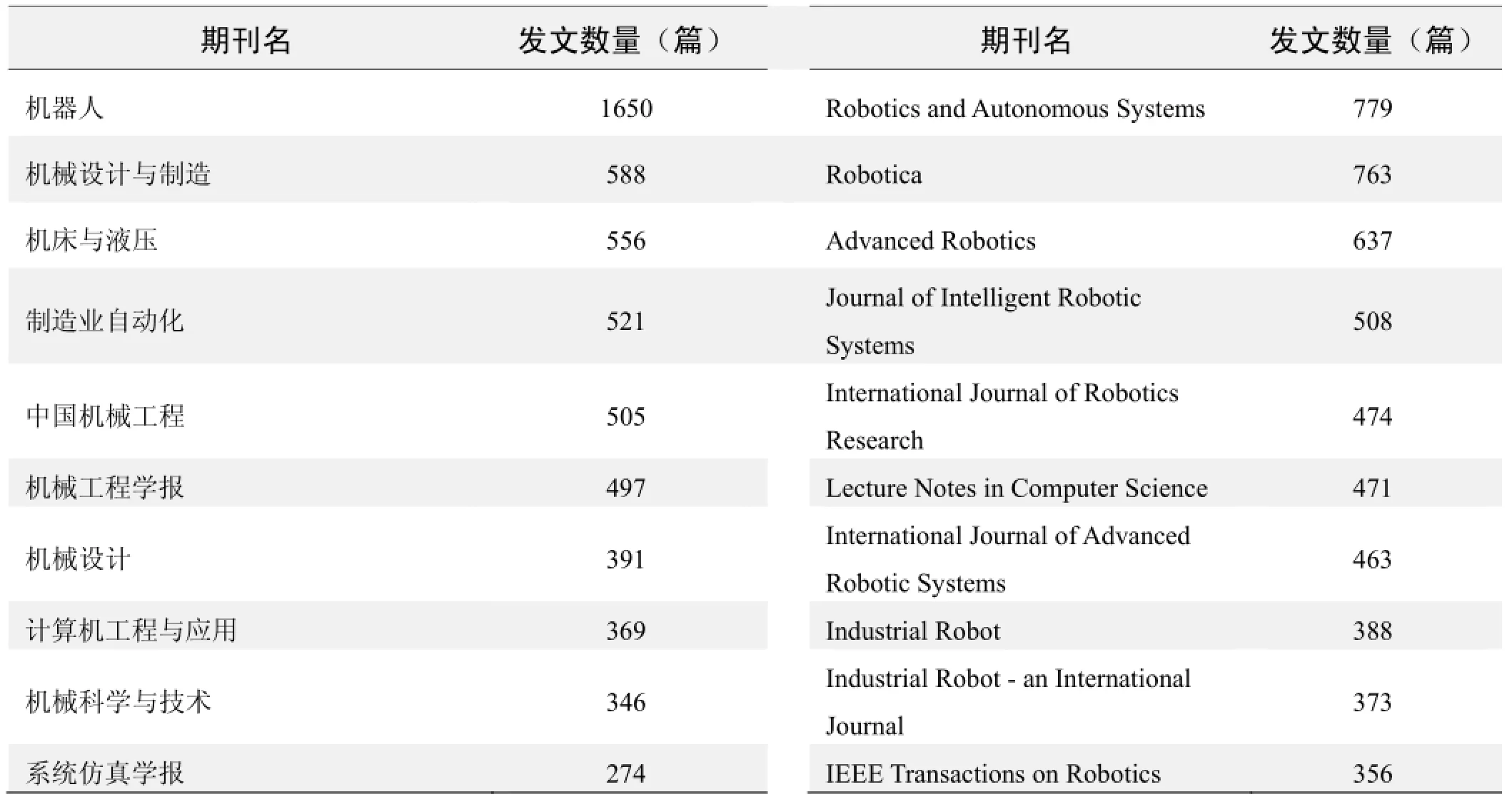
期刊发文数量排名(CNKI) 期刊发文数量排名(WOS)
根据中国知网(CNKI)数据报告,以“机器人(Robot)”为词条检索到的高被引论文排行结果如下。
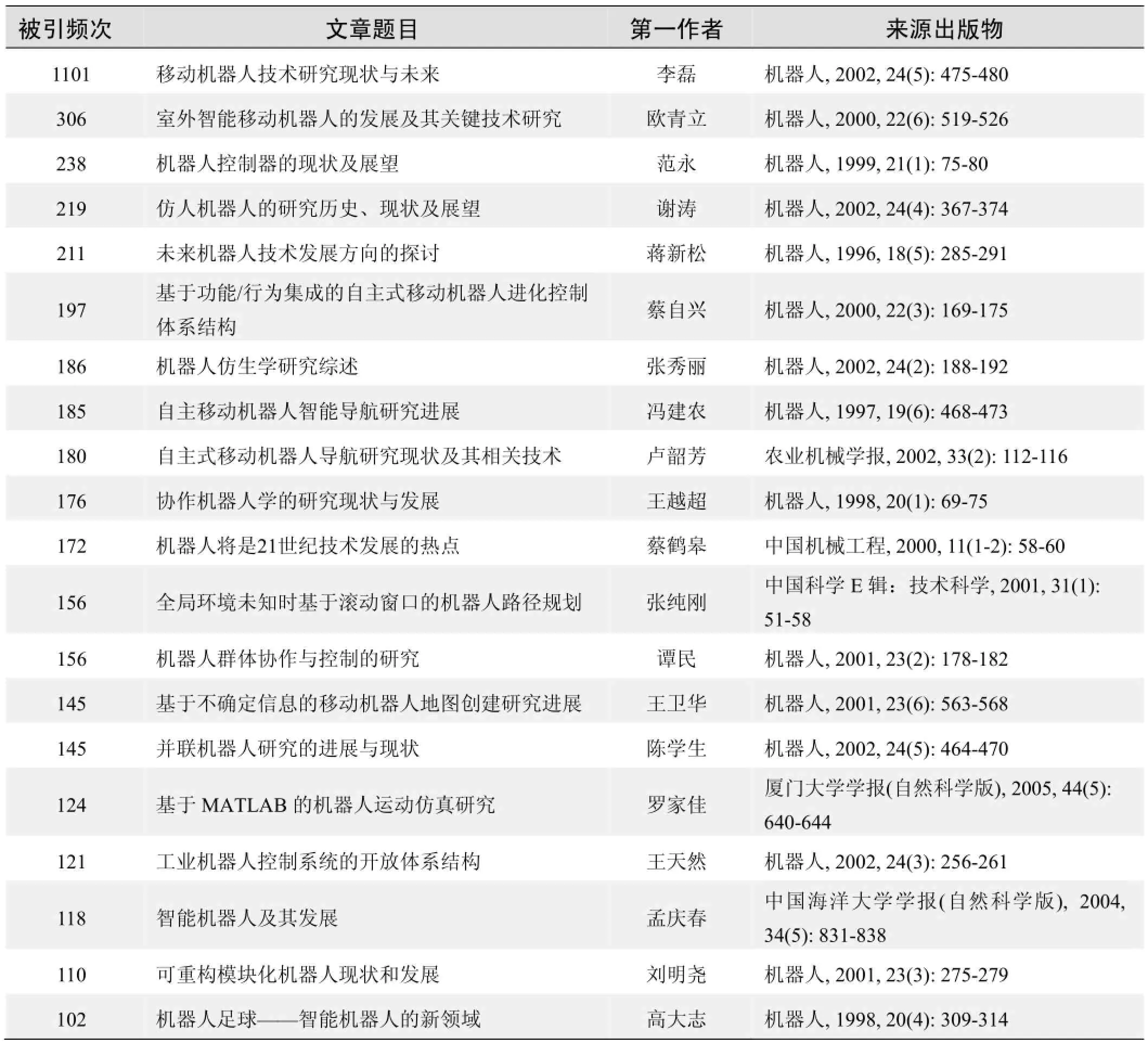
国内数据库高被引论文排行
根据Web of Science统计数据,以“机器人(Robot)”为词条检索到的高被引论文排行结果如下。

国外数据库高被引论文排行

国外数据库高被引论文排行(续表)
·经典文献推荐·
基于Web of Science检索结果,利用Histcite软件选取LCS(Local Citation Score,本地引用次数)TOP 30文献作为节点进行分析,得到本领域推荐的经典文献如下。
Tracking control of non-linear systems using sliding surfaces, with application to robot manipulators
Slotine, JJ; Sastry, SS
Abstract:A methodology of feedback control is developed to achieve accurate tracking in a. class of non-linear, time-varying systems in the presence of disturbances and para meter variations. The methodology uses in its idealized form piecewise continuous feedback control, resulting in the state trajectory sliding along a time-varying sliding surface in the state space. This idealized control law achieves perfect tracking; however, non-idealities in its implementation result in the generation of an undesirable high-frequency component in the state trajectory. To rectify this, it is shown how continuous control laws may be used to approximate the discontinuous control law to obtain robust tracking to within a prescribed accuracy without generating undesirable high-frequency signal. The method is applied to the control of a two-link manipulator handling variable loads in a flexible manufacturing system environment. A new adaptive robot control algorithm is derived, which consists of a PD feedback part and a full dynamics feedfor ward compensation part, with the unknown manipulator and payload parameters being estimated online. The algorithm is computationally simple, because of an effective exploitation of the structure of manipulator dynamics. In particular, it requires neither feedback of joint accelerations nor inversion of the estimated inertia matrix. The algorithm can also be applied directly in Cartesian space. A framework for the analysis and control of manipulator systems with respect to the dynamic behavior of their end-effectors is developed. First, issues related to the description of end-effector tasks that involve constrained motion and active force control are discussed. A real-time obstacle avoidance approach for mobile robots has been developed and implemented. It permits the detection of unknown obstacles simultaneously with the steering of the mobile robot to avoid collisions and advance toward the target. The novelty of this approach, entitled the virtual force field method, lies in the integration of two known concepts: certainty grids for obstacle representation and potential fields for navigation. This combination is especially suitable for the accommodation of inaccurate sensor data as well as for sensor fusion and makes possible continuous motion of the robot with stopping in front of obstacles. This navigation algorithm also takes into account the dynamic behavior of a fast mobile robot and solves the local minimum trap problem. Experimental results from a mobile robot running at a maximum speed of 0.78 m/s demonstrate the power of the algorithm. We present a new methodology for exact robot motion planning and control that unifies the purely kinematic path planning problem with the lower level feedback controller design. Complete information about the freespace and goal is encoded in the form of a special artificial potential function-a navigation function-that connects the kinematic planning problem with the dynamic execution problem in a provably correct fashion. The navigation function automatically gives rise to a bounded-torque feedback controller for the robot's actuators that guarantees collision-free motion and convergence to the destination from almost all intial free configurations. Since navigation functions exist for any robot and obstacle course, our methodology is completely general in principle. However, this paper is mainly concerned with certain constructive techniques for a particular class of motion planning problems. Specifically, we present a formula for navigation functions that guide a point-mass robot in a generalized sphere world. The simplest member of this family is a space obtained by puncturing a disc by an arbitrary number of smaller disjoint discs representing obstacles. The other spaces are obtained from this model by a suitable coordinate transformation that we show how to build. Our constructions exploit these coordinate transformations to adapt a navigation function on the model space to its more geometrically complicated (but topologically equivalent) instances. The formula that we present admits sphere-worlds of arbitrary dimension and is directly applicable to configuration spaces whose forbidden regions can be modeled by such generalized discs. We have implemented these navigation functions on planar scenarios, and simulation results are provided throughout the paper. Objective: In patients with stroke, the authors tested whether additional sensorimotor training of the paralyzed or paretic upper limb delivered by a robotic device enhanced motor outcome. Methods: Fifty-six patients with stroke and hemiparesis or hemiplegia received standard poststroke multidisciplinary rehabilitation, and were randomly assigned either to receive robotic training (at least 25 hours) or exposure to the robotic device without training. Outcomes were assessed by the same masked raters, before treatment began and at the end of treatment, with the upper extremity component of the Fugl-Meyer Motor Assessment, the Motor Status score, the Motor Power score, and Functional Independence Measurement. Result: The robot treatment and control group had comparable clinical characteristics, lesion size, and pretreatment impairment scores. By the end of treatment, the robot-trained group demonstrated improvement in motor outcome for the trained shoulder and elbow (Motor Power score, p < 0.001; Motor Status score, p < 0.01) that did not generalize to untrained wrist and hand. The robot-treated group also demonstrated significantly improved functional outcome (Functional Independence Measurement-Motor, p < 0.01). Conclusion: Robot-delivered quantitative and reproducible sensorimotor training enhanced the motor performance of the exercised shoulder and elbow. The robot-treated group also demonstrated improved functional outcome. When added to standard multidisciplinary rehabilitation, robotics provides novel therapeutic strategies that focus on impairmentbook=7,ebook=11reduction and improved motor performance. This paper first describes the problem of goals nonreachable with obstacles nearby when using potential field methods for mobile robot path planning. Then, new repulsive potential functions are presented by taking the relative distance between the robot and the goal into consideration, which ensurers that the goal position is the global minimum of the total potential. A mobile robot is one of the well-known nonholonomic systems. The integration of a kinematic controller and a torque controller for the dynamic model of a nonholonomic mobile robot has been presented. In this paper, an adaptive extension of the controller is proposed. If an adaptive tracking controller for the kinematic model with unknown parameters exists, an adaptive tracking controller for the dynamic model with unknown parameters can be designed by using an adaptive backstepping approach. A design example for a mobile robot with two actuated wheels is provided. In this design, a new kinematic adaptive controller is proposed, then a torque adaptive controller is derived by using the kinematic controller. This brief proposes a sliding-mode control method for wheeled-mobile robots in polar coordinates. A new sliding-mode control method is proposed for mobile robots with kinematics in two-dimensional polar coordinates. In the proposed method, two controllers are designed to asymptotically stabilize the tracking errors in position and heading direction, respectively. By combining these controllers together, both asymptotic posture (position and heading direction) stabilization and trajectory tracking are achieved for reference trajectories at global regions except the arbitrary small region around the origin. In particular, constraints on the desired linear and angular velocities as well as the posture of the mobile robot are eliminated unlike the previous studies based on kinematics expressed in polar coordinates. Accordingly, arbitrary trajectories including a circle and a straight line in various forms can be followed even with large initial tracking errors and bounded disturbances. The stability and performance analyzes are performed and also simulations are included to confirm the effectiveness of the proposed scheme. We describe an implemented architecture that integrates a map representation into a reactive, subsumption-based mobile robot. As an alternative to hybrid methods, which separate the reactive and traditional planning parts of the control system, we present a fully integrated reactive system that removes the distinction between the control program and the map. Our method was implemented and tested on a mobile robot equipped with a ring of sonars and a compass, and programmed with a collection of simple, incrementally designed behaviors. The robot performs collision-free navigation, dynamic landmark detection, map construction and maintenance, and path planning. Given any known landmark as a goal, the robot plans and executes the shortest known path to it. If the goal is not reachable, the robot detects failure, updates the map, and finds an alternate route. The topological representation primitives are designed to suit the robot's sensors and its navigation behavior, thus minimizing the amount of stored information. Distributed over a collection of behaviors, the map itself performs constant-time localization and linear-time path planning. The approach we present is qualitative and tolerant of sensor inaccuracies, unexpected obstacles, and course changes. It extends the repertoire of integrated reactive systems to tasks requiring spatial modeling and user interaction.
来源出版物:International Journal of Control, 1983, 38(2): 465-492
On the adaptive-control of robot manipulators
Slotine, JJE; Li, WP
来源出版物:International Journal of Robotics Research, 1987, 6(3): 49-59
A unified approach for motion and force control of robot manipulators: The operational space formulation
Khatib, O
The fundamentals of the operational space formulation are then presented, and the unified approach for motion and force control is developed. The extension of this formulation to redundant manipulator systems is also presented, constructing the end-effector equations of motion and describing their behavior with respect to joint forces. These results are used in the development of a new and systematic approach for dealing with the problems arising at kinematic singularities. At a singular configuration, the manipulator is treated as a mechanism that is redundant with respect to the motion of the end-effector in the subspace of operational space orthogonal to the singular direction.
来源出版物:IEEE Journal of Robotics and Automation, 1987, 3(1): 43-53
Real-time obstacle avoidance for fast mobile robots
Borenstein, J; Koren, Y
来源出版物:IEEE Transactions on Systems, Man and Cybernetics, 1989, 19(5): 1179-1187
Exact robot navigation using artificial potential functions
Rimon, E; Koditschek, DE
Keywords:time obstacle avoidance; mobile robots; manipulators; motion robotics; robot; aids; stroke; motor recovery GNRON problem; new repulsive potential function; potential field adaptive backstepping; adaptive tracking control; dynamic model; nonholonomic mobile robot polar coordinates; posture stabilization; sliding-mode control; trajectory tracking; wheeled-mobile robots
来源出版物:IEEE Transactions on Robotics and Automation, 1992, 8(5): 501-518
A novel approach to stroke rehabilitation: Robot-aided sensorimotor stimulation
Volpe, BT; Krebs, HI; Hogan, N; et al.
来源出版物:Neurology, 2000, 54(10): 1938-1944
New potential functions for mobile robot path planning
Ge, SS; Cui, YJ
来源出版物:IEEE Transactions on Robotics and Automation, 2000, 16(5): 615-620
Adaptive tracking control of a nonholonomic mobile robot
Fukao, T; Nakagawa, H; Adachi, N
来源出版物:IEEE Transactions on Robotics and Automation, 2000, 16(5): 609-615
Sliding-mode tracking control of nonholonomic wheeled mobile robots in polar coordinates
Chwa, D
来源出版物:IEEE Transactions on Control Systems Technology, 2004, 12(4): 637-644
Integration of representation into goal-driven behavior-based robots
Mataric, MJ
来源出版物:IEEE Transactions on Robotics and Automation, 1992, 8(3): 304-312
·高被引论文摘要·
被引频次:1101
文献编号本领域经典文章题目第一作者来源出版物1 Tracking control of non-linear systems using sliding surfaces, with application to robot manipulators Slotine, JJ International Journal of Control, 1983, 38 (2): 465-492 2On the adaptive-control of robot manipulators Slotine, JJE International Journal of Robotics Research, 1987, 6(3): 49-59 3 A unified approach for motion and force control of robot manipulators: The operational space formulation Khatib, O IEEE Journal of Robotics and Automation, 1987, 3(1): 43-53 4Real-time obstacle avoidance for fast mobile robots Borenstein, J IEEE Transactions on Systems, Man and Cybernetics, 1989, 19(5): 1179-1187 5 Exact robot navigation using artificial potential functions Rimon, E IEEE Transactions on Robotics and Automation, 1992, 8(5): 501-518 6 A novel approach to stroke rehabilitation: Robot-aided sensorimotor stimulation Volpe, BT Neurology, 2000, 54(10): 1938-1944 7New potential functions for mobile robot path planning Ge, SS IEEE Transactions on Robotics and Automation, 2000, 16(5): 615-620 8 Adaptive tracking control of a nonholonomic mobile robot Fukao, T IEEE Transactions on Robotics and Automation, 2000, 16(5): 609-615 9 Sliding-mode tracking control of nonholonomic wheeled mobile robots in polar coordinates Chwa, D IEEE Transactions on Control Systems Technology, 2004, 12(4): 637-644 10 Integration of representation into goal-driven behaviorbased robots Mataric, MJ IEEE Transactions on Robotics and Automation, 1992, 8(3): 304-312
