基于MATLAB的直流电机双闭环控制系统PID参数自寻优
2015-12-27陈龙灿赵
陈龙灿赵 胜 胡 毅
(1 重庆邮电大学移通学:,重庆 合川 401520)(2 国网宁夏电力公司中卫供电分公司,宁夏 中卫 755000)(3 贵州赤天化正泰工程有限责任公司,贵州 赤水 564707)
基于MATLAB的直流电机双闭环控制系统PID参数自寻优
陈龙灿1赵 胜2胡 毅3
(1 重庆邮电大学移通学:,重庆 合川 401520)(2 国网宁夏电力公司中卫供电分公司,宁夏 中卫 755000)(3 贵州赤天化正泰工程有限责任公司,贵州 赤水 564707)
转速、电流反馈控制的直流电机双闭环系统静、动态性能优良,在直流拖动系统中得到广泛的应用。本文提出一种基于MATLAB的针对ASR和ACR快速高效的设计方法。将MATLAB工具箱结合应用,实现基于MATLAB的直流电机双闭环控制器设计。应用Simulink对控制系统进行仿真,应用Simulink Design Optimization工具箱进行ASR和ACR的PID参数自寻优,具有一定的工程和理论设计参考意义。
双闭环;MATLAB;仿真;PID参数
1 前沿
目前,工业直流调速系统仍然是自动调速系统的主要形式,随着计算机技术的发展,各类嵌入式控制器大量在工业中的运用,使得直流调速系统的精度和控制要求越来越高。MATLAB软件以其方便、快捷、高效等优点而风靡全球且被广泛应用于各行各业,Simulink仿真平台更是为工程设计提供了便利[1]。本文是基于MATLAB/Simulink的仿真平台,自动寻找直流电机双闭环系统中的ASR和ACR的PID最优参数。
在直流调速系统中,我们希望在启动或者制动过渡过程中,开始始终保持电流为允许的最大值,给调速系统提供最大的启动或制动转矩。但是当到达稳速之后希望电流能立即降到额定电流,使电磁转矩等于负载转矩,从而保证系统稳定运行[2]。在此基础上引入了电流负反馈(ACR)和转速负反馈(ASR)对整个系统进行调节和控制,如图1所示。

图1 转速、电流反馈控制直流调速系统原理图
外环ASR和内环ACR均为PI调节器,为了能够实现控制和快速的跟随,ASR和ACR均设计有限幅电路,ASR的输出电压Uim限幅决定了电流的给定值为最大,ACR的输出电压Ucm限幅限制了电力电子变换装置的最大输出电压Ud0。
2 系统参数及要求
本文研究的对象为直流双闭环调速系统,其系统参数为:
直流电动机:220V,136A,1460r/min,Ce=0.132V.min/r,允许过载倍数λ=1.5,晶闸管装置放大系数Ks=40,电枢回路总电阻R=0.5,时间常数Tl=0.03s,Tm=0.18s,电流反馈系数β= 0.05V/A,转速反馈系数α=0.007V.min/r。
设计要求:稳态无静差,上升时间Tr=2.5s,调节时间Ts= 3.5s(其中±2%的范围为允许误差带),超调量σ≤5%
3 建立系统仿真模型
建立Simulink系统仿真模型图如图2所示。

图2 双闭环直流调速系统的动态仿真图
3 系统PID参数自动优化
打开两个“PID”模块,将其中的P、I、D参数均设置为Kp、Ki、Kd;在MATLAB命令窗口对这三个参数进行任意值的赋值;然后打开“Signal Constraint”模块,由“Optimization→Tuned Parameters”添加Kp、Ki、Kd这三个变量,使模块确定优化的参数对象,由“Goals→Desired Response”设置系统期望参数。点击运行,MATLAB开始运算,根据之前期望的响应自动选择最合适的PID参数,进行PID参数自寻优,其中本文中只使用了PI调节器,如果需要PID调节,设计方法相同。
根据要求,经过自寻优得出ASR和ACR中Kp=1.5748 Ki= 0.035,如图3所示,运行电机转速输出如图4所示。

图3 Signal Constraint自动寻优参数
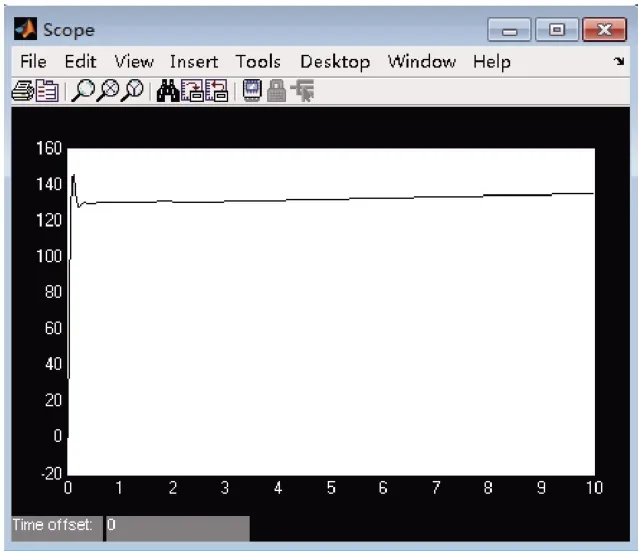
图4 电机运行仿真图
本文中Simulink Design Optimization工具箱对ASR和ACR的PID参数进行同时自动优化,即最终得到的两个PID参数一致,这也给工程设计带来了极大的方便,不用分别对每个PID参数进行计算和优化。当系统期望的响应指标发生改变后,运用此方法仍然可以寻找适合系统的最佳PI参数。
4 结论
本文介绍了基于MATLAB的直流电机双闭环控制系统PID参数自动寻优,结合运用Simulink仿真和Simulink Design Optimization完成了控制系统的PID快速设计,控制效果能够满足设定要求,证明该方法设计周期短,开发效率高,调整和计算方便,对直流双闭环控制系统中控制器的开发具有一定的参考价值。
[1]刘春艳.闻玉凤.基于MATLAB/Simulink双闭环直流调速系统的仿真研究[N].山西大同大学学报.2014.(3):26-28
[2]阮毅.陈伯时.电力拖动自动控制系统-运动控制系统[M].机械工业出版社.2012.7
