全空域多目标测控天线技术研究*
2015-12-25俄广西刘云阁
俄广西,柴 霖,刘云阁
(中国西南电子技术研究所,成都 610036)
1 引言
随着我国航天技术的快速发展,在轨的各类卫星以及其他低轨飞行器的数量在未来10 年内将快速增长,这就要求卫星测控系统具备同时多目标测控及运行管理能力。
在多目标同时测控方面,当前的技术途径主要有三种:第一种是采用抛物面天线的传统测控设备在单波束内采用码分多址对星座内的多颗卫星实现同时测控,这种方式仅能对小型星座内的少量卫星进行多目标测控,同时测控的覆盖范围不大于一个波束;第二种是采用平面相控阵天线,通过同时形成多个波束,对局部空域的多飞行器进行同时多目标测控,多目标测控的作用空域比基于抛物面天线的单波束多目标测控的有所扩大,但是不能同时覆盖全空域(5°~90°仰角、0°~360°方位角),而且仍需要依靠机械伺服装置驱动平面相控阵天线分时覆盖全空域;第三种是新兴的全空域多目标测控技术,通过采用共形阵列天线和多波束形成技术,同时形成多个波束,单站实现对全空域内的多颗卫星同时进行跟踪测控,在测控站的运营管理、设备的操作维护等综合成本上节约大量的人力和物力成本。
在地基多目标测控方面,国外最新的研究现状是美国空军在网格球顶相控阵天线(Geodesic Dome Phased Array Antenna,GDPAA)方面的研究[1-7]。该项目将同时对4个目标测控,为美国空军提供全空域范围内的卫星遥控遥测与跟踪能力,同时降低全寿命周期的运管成本。系统中的相控阵天线由五边形和六边形子阵构成,系统采用有源相控阵技术,利用4 b 的射频移相器改变各路信号的相位以形成波束。目前,该项目已经完成了初步试验,在空军卫星测控网(Air Force Satellite Control Network,AFSCN)现有设备的支持以及14 颗不同轨道卫星的配合下,该相控阵测控系统成功地演示了其TT&C 功能以及同时两个目标的测控功能。在演示验证中,该天线与低轨、中轨、同步轨道、高椭圆轨道的卫星进行了近200 次通信。采用了7个关键性能参数评估天线的各方面性能,包括天线的多链路通信次数以及上行链路的功率、接收增益、L 频段与S 频段的工作情况、跟踪精度、120°视场以及在运行的同时进行维护等。该系统计划到2017 年完成系统试验。
与美国的GDPAA 类似,欧空局(European Space Agency,ESA)也在开发一种名为球面阵天线(Geodesic Dome Array Antenna,GEODA)的相控阵测控系统。该系统最初设计用于接收星群下行信号,工作频段是L 频段,中心频率1700 MHz,射频带宽大于100 MHz,天线可视角度是方位360°、俯仰大于5°。
本文根据单站能够完成同时对多个目标的测控原则,研究了一站式的全空域多目标测控系统,采用相控阵天线实现了设计目标。
2 全空域多目标测控系统体系架构设计
全空域多目标同时测控的体系结构设计是至关重要的技术环节,系统结构设计既要满足系统性能技术指标的要求,又要兼顾未来系统功能升级的可实现性,还得考虑系统造价,达到良好的性价比。在全空域多目标测控系统中与上述需求相关的因素主要有两个,一是天线设计技术,二是波束形成技术。
2.1 天线总体技术
航天测控的一个重要特点是整个跟踪弧段内对跟踪精度的要求都比较高,跟踪精度与波束宽度相关,为了保证跟踪精度,波束在扫描时应该不展宽,雷达系统中通常采用的四面体拼阵的天线方案在波束从面阵的法线开始扫描时,增益在逐渐下降,波束宽度在展宽,跟踪精度逐渐降低。
全空域多目标测控系统的造价是需要重点考量的要素。全空域多目标测控系统的成本主要集中在天线阵元、T/R 组件和波束形成设备上,这三部分的成本都与阵元通道的数量基本成正比,因此降低系统造价的重要途径就是要减少阵元通道的数量。在覆盖全空域和一定增益的条件下,采用球面阵天线需要的阵元数量和T/R 组件更少,系统成本更低。
基于以上分析,全空域多目标测控系统采用球面阵天线是一个最佳选择,国外的研究现状也从侧面证实了这一点。
球面阵天线采用半球面加柱面的形式,增加柱面的目的是为了改善低仰角时的增益。阵元按一定的规律布置在球面上,如图1 所示。
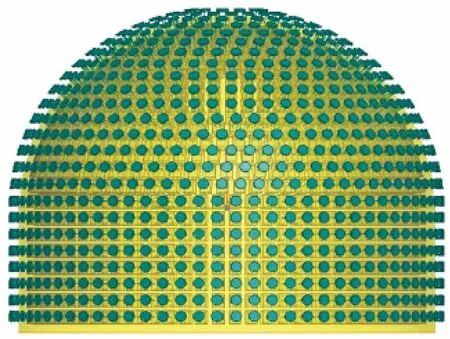
图1 球面阵示意图Fig.1 Sphere array antenna sketch map
球面阵有如下特点:
(1)性能指标好,理想的球面阵从空间任何方向来看都是相同的,在严格的代价函数约束下,球面阵的波束在移动过程中能够保持恒定的增益,性能最优;
(2)可以避免四面体拼阵天线在大口径时的瞬时带宽受限的问题,在同样的等效口径下,球面阵的最大渡越时间小于平面阵,能够处理更大带宽的信号;
(3)在要求相同增益的情况下,球面阵所需要的阵元数目比四面体拼阵天线要少,系统成本低,经济性好;
(4)与四面体拼阵天线相比,由于采用球面阵天线形成波束不存在子阵切换,阵元是逐个滑动的,波束输出信号的相位是连续的,保证了测速的准确性和可靠性。
2.2 多波束形成总体技术
多波束形成技术是全空域多目标测控技术的核心,没有多波束形成,也就不能实现多目标测控。多波束形成技术按照实现方式区分主要有模拟波束形成、数字波束形成和模拟数字混合波束形成三种方式。
模拟波束形成以及数字模拟混合波束形成技术同时形成的波束数目与射频移相器、功分器等的套数相关,要求同时形成的波束越多,需要的射频移相器和波束形成网络也越多,结构体积就越大,复杂性也就越高,所以形成的波束数目有限。一般而言,当同时形成的波束数目为3个以上时,模拟移相器的合成网络会非常复杂,而且天线设计定型后,无法再扩展波束数目。数字波束形成技术是在基带上对每个阵元的信号进行处理形成波束,同时形成的波束数目与天线、T/R 组件完全无关,能够同时形成的波束数目多,实现方式灵活,可以在不改动硬件设备的情况下通过软件升级来实现功能的升级和扩展。
由于用户对在全空域多目标测控系统同时形成的波束数量要求比较高,前期研究提出的波束数目为16,从未来测控的需求来看,要求同时形成的波束数目不会低于这个数字,采用数字波束形成技术可以满足波束数目的要求。
从用户需求和技术发展来看,测控、通信都对自适应抗干扰能力提出了较高的要求,传统的抗干扰技术采用跳扩频,存在易被破解的风险。采用基于数字波束形成的自适应抗干扰技术则可以通过空间滤波来抑制干扰,只要干扰和期望信号不是从同一方向入射,系统就可以在干扰方向上形成零陷以消除干扰。模拟波束形成技术仅能压低副瓣,不能实现自适应抗干扰。
基于以上分析,从当前的系统功能技术指标和发展趋势的角度考虑,数字波束形成是最合适的波束形成方式。
2.3 原理样机架构
全空域多目标测控系统的原理样机采用球面阵天线和数字多波束形成技术,充分利用了数字多波束形成的指向精度高、波束数目扩展灵活、系统易于升级等技术优点。原理样机按照同时形成16个波束进行设计,整机原理框图如图2 所示。
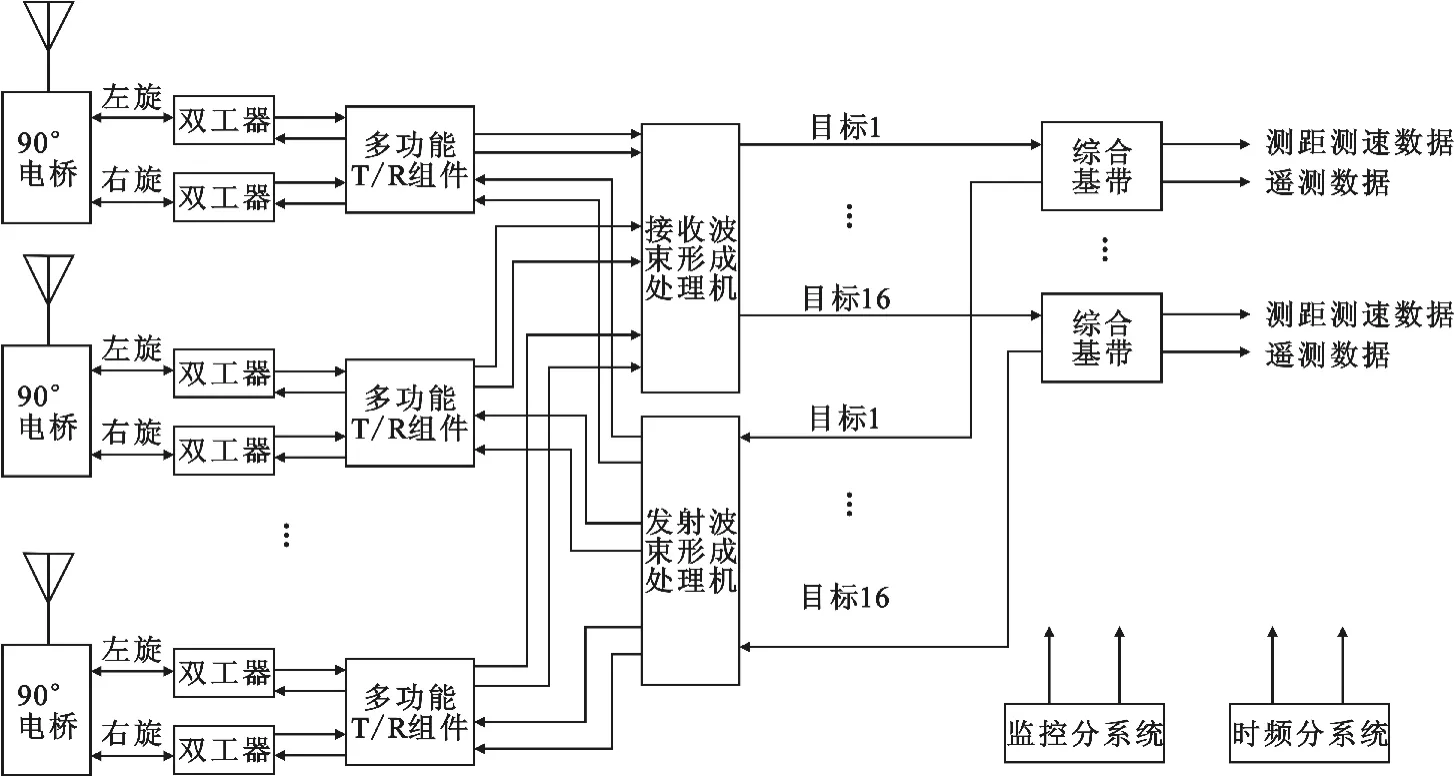
图2 整机原理框图Fig.2 Block diagram of the proposed TT&C system
系统采用球面阵天线,每个阵元都有独立的3 dB 电桥、双工器和T/R 组件,根据波束形成算法,同时形成16个发射波束和接收波束,指向16个测控目标,完成对目标的遥控遥测。
3 全空域多目标测控系统关键技术研究
3.1 多目标测控系统的天线设计
用平面阵天线拼阵而成的全空域多目标测控系统中,面阵的方向性函数为

若阵列由同极化的相似元组成,不计互耦,式(1)可以简化为

式中,fe(θ,φ)为单元因子,Fa(θ,φ)为阵因子。
从式(2)可以看出,面阵的方向性函数随着扫描角度变化而不同。
在球面阵天线系统中,采用有效阵元连续滑动技术形成波束,在波束扫描时,每个有效工作区域内的有效阵元数目不变,波束指向保持在有效区域内中心阵元的法线方向上不变,不做相位扫描,滑动有效阵元,则波束随之扫描。球面阵的阵元布置示意图如图3 所示。
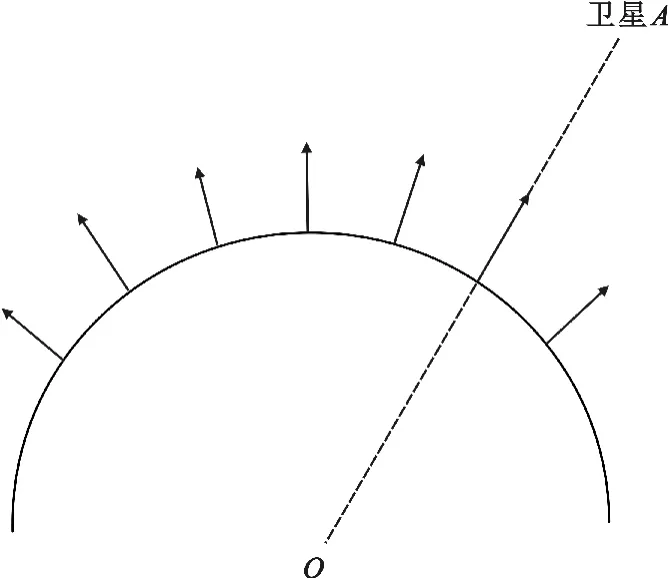
图3 球面阵天线示意图Fig.3 Array arrangement
从球面阵天线的中心看向卫星A 的视线OA 与球面阵的交点处的阵元为中心,阵元法线与OA 的夹角小于系统设计值的所有阵元作为有效单元,卫星A 在球面阵天线系统中的方向(θ,φ),指向OA 的方向性函数为
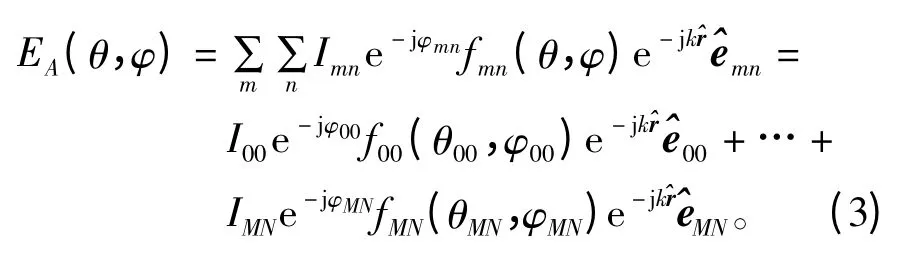
式中,(θMN,φMN)为第(M,N)号有效阵元与OA 的夹角。当卫星运动到A',有效阵元区域也随之滑动,新有效区域的第(M,N)号有效阵元与OA'的夹角为)。由于球面阵系统中的有效区域随卫星的运动而滑动,(θMN,φMN)=,指向OA'的方向性函数为
比较式(3)和式(4)可以看出,卫星运动前后的方向性函数相同,这意味着在球面阵中,波束扫描时波束没有变形。实际应用中,由于仰角不同时有效阵元数量不同,导致球面阵天线的增益随仰角而有所变化。按照等效10 m 口径天线进行设计,增益随仰角的变化如图4 所示。
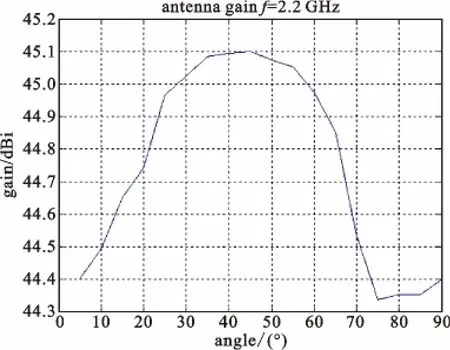
图4 等效10 m 天线阵增益随仰角变化图Fig.4 The gain of 10 m sphere array antenna vs.elevation
从5°仰角开始,天线增益随仰角的增加而增大,在45°仰角时达到最大,该仰角时的有效阵元数目最大,然后增益随仰角增加逐步减小。在5°~90°仰角内增益波动低于0.8 dB,增益的一致性优于平面相控阵天线。
3.2 自适应抗干扰波束形成算法
为了实现自适应抗干扰功能,系统采用线性约束最小方差(Linearly Constrained Minimun Variance,LCMV)算法。
对于图5 所示的波束形成处理器,设定阵列天线为M 元等间距直线阵列天线,相邻阵元之间的间距为d。阵元间距d 要小于或者等于窄带入射信号si(t)的半波长,一般可以取入射信号的半波长。

图5 数字波束形成的原理图Fig.5 Block diagram of DBF
阵列输出为

假设期望信号的DOA 已知,其方向矢量记为a,为了使期望信号无损失地通过并能抑制干扰,则基于LCMV 的自适应波束形成的数学表达式为

使用拉格朗日算子可以计算得到最优加权矢量为

根据式(7)得到的加权矢量可以实现在抑制干扰的同时保证期望信号的增益恒定。
上述公式求解加权矢量的运算非常复杂,为此选用最小均方(Least Mean Square,LMS)算法来实现。
使用拉格朗日代价函数

可以计算得到最优加权矢量的递推表达式为

对式(8)中w 求导数可得

将式(10)代入式(9)可得

式(11)中的λn需要在每次递推中更新。
联立wHa=1,可以得到

4 全空域多目标测控系统原理样机的演示验证
为了验证全空域多目标测控系统技术的正确性与性能,我们研制了一套原理样机并进行了试验。原理样机由球面阵天线、T/R 组件、数字多波束形成和综合基带等设备组成。为了便于演示验证,进行了车载设计,原理样机实物如图6 所示,(a)为球面阵天线车,(b)为基带设备方舱车。

图6 全空域多目标测控实物Fig.6 Photo of sphere array antenna
原理样机按照等效2 m天线的要求设计,经历了设计、研制、外场试验和技术指标测试等几个阶段。部分试验及测试内容如下:多目标同时工作情况下的有效全向辐射功率(Effective Isotropic Radiated Power,EIRP)测试;多目标同时工作情况下的G/T值测试;角跟踪精度测试;测距、测速精度测试;100 MHz内的宽带特性测试;通道幅相一致性试验;目标交叉穿越试验;16个目标同时工作能力测试;外场跟星实验。外场试验和指标测试结果表明:所有试验测试项目均达到设计要求,原理样机的测距、测速和测角精度等技术指标满足传统测控站的要求,能够对分布于5°~90°仰角、0°~360°全空域内的16个目标同时进行测控,16个目标的工作频率可以在100 MHz带宽内任意设定,工作体制不限。外场跟星试验也证明原理样机初步具备了测控任务的执行能力,为全空域多目标测控技术的工程化奠定了坚实的基础。
[1]Ivancic W D.Architecture and System Engineering Development Study of Space-Based Networks for NASA Missions[C]//Proceedings of 2003 IEEE Aerospace Conference.Big Sky:IEEE,2003:1179-1186.
[2]Montesinos I,Fernandez- Jambrina J L,Sierra- Perez M,et al.Geoda:unirary cell distribution composition and working properties[C]//Proceedings of the 2008 URSI General Assembly.Chicago:[s.n.],2008:1-4.
[3]Campo M A,Montesinos I,Jambrina J L F,et al.GEODA-GRUA:Disenodel modulo T/R[C]//Proceedings of XXIV Simposium Nacional de la Union Cientifica de Radio.Santander:[s.n.],2009:115-116.
[4]刘嘉兴.相控阵测控系统概论[J].电讯技术,2005,45(3):1-6.LIU Jiaxing.Phased Array TT&C Systems[J].Telecommunication Engineering,2005,45(3):1- 6.(in Chinese)
[5]Torre A,Gonzalo J,Pulido R M,et al.New Generation Ground Segment Architechture for LEO Satellite[C]//Proceedings of 57th International Astronautical Congress.Valencia:[s.n.],2006:221-226.
[6]Petez M S,Torre A,Masa J L,et al.GEODA:Adaptive Antenna Array for Metop Satellite Signal Reception[C]//Proceedings of 4th ESA International workshop on Tracking,Telemetry and Command System for Space Applications.Darmstadt:ESA,2007:11-14.
[7]刘嘉兴.飞行器测控与信息传输技术[M].北京:国防工业出版社,2011.LIU Jiaxing.Spacecraft TT&C and Information Transmission Technology[M].Beijing:National Defense Industry Press,2011.(in Chinese)
