计算精确角位置的二维金属玻璃/压电陶瓷磁电式地磁仪器
2015-12-24DucTuNgocLapHuongGiang
N.H.Duc B.D.Tu N.T.Ngoc V.D.Lap D.T.Huong Giang
0 引言
人类需要利用地磁仪器检测并测量地磁场的强度和方向。这些在本地定向和定位中得到应用。地磁仪器特别灵敏,因此对于确定空间方位角和倾斜角非常有用。因此,基于传统的探测方法,研制出了不同的二维和三维磁传感器,如磁通门、霍尔效应和巨磁阻自旋阀[1-5]。近几年,磁电(ME)效应传感器引起了许多关注[6-10]。之前,我们研制了简单、低成本但具有潜力的一维磁电式地磁场传感器,它采用了具有最佳细长形状和面积的以镍为基底的金属玻璃/压电复合材料[9]。这种传感器能完美地测量地磁场的强度和方向,精度可分别达到10-4Oe和10-1度。然而,仅在实验室中研究了一维传感器的特性。
本文的目的是提供一台完全可以使用的二维磁电式地磁仪器,其可与移动的无线电收发机结合使用,自动确定和控制相对于地球同步卫星位置的无线电收发机天线和方向。这台仪器由传感器模块和硬件构成。磁传感器模块由两个正交排列的一维金属玻璃/压电陶瓷磁电式传感器构成。该二维传感器同时测量两个正交的磁场分量H1和H2,提供有关磁场强度H和相对于参考磁场方向的角度值的完整信息。传感器的信号通过自制的数字锁定放大器激发并检测。通过旋转和/或摆动传感器模块,可以自动计算出空间(方位和倾斜)角的位置。
1 传感器模块的研制和工作原理
磁电式磁场传感器是通过在压电陶瓷板两面黏结具有磁致伸缩性的金属玻璃叠层研制而成,其具有金属玻璃/压电陶瓷/金属玻璃叠层结构[9],细节见图1(a)。在这种结构中,500μm厚的压电陶瓷板由美国压电陶瓷有限公司(Mackeyville,PA,USA)提供,型号为 APCC-855。18μm 厚、面积为15mm×1mm的磁致伸缩性叠层由自制的Fe76.8Ni1.2B13.2Si8.8(镍基金属玻璃)熔纺带切割而成。将线圈密度为10.5匝/毫米的螺线管包裹在整个叠层磁电式层状复合材料外,制作了一维传感器(图1b)。然后,将两个准备好的一维传感器S1和S2沿两个正交轴组装在一起,制作出一个二维地磁场传感器(图1c)。

图1 (a)金属玻璃/压电陶瓷(PZT)/金属玻璃叠层复合材料的扫描电镜(SEM)图。向量hac和P分别表示使用的交流电(ac)磁场和电极化方向(见正文)。用金属玻璃/压电陶瓷/金属玻璃15mm×1mm叠层复合材料装配的(b)一维和(c)二维磁电式传感器原型
众所周知,已经在多铁性材料和/或铁磁-铁电复合材料观测到了磁电效应。在磁电叠层复合材料结构中(见图1),由于组件之间的力学耦合,压电陶瓷板会经受强制应变,该强制应变是在面内外加直流(dc)磁场H0下由磁致伸缩层感应的。随后穿过压电板厚度(tPZT)感应到对强制应变的磁电电压响应(VME)。
磁电电压产生的原理,也就是H0信号检测的原理归纳如下。1)首先,通过附加线圈,用共振频率的弱恒定交流磁场hac(=h0sin(2πf0t))振荡激发叠层沿其长轴方向的振动;2)然后,检测作为磁电电压微弱变化的H0的微弱变化。用锁定方法可测量由H0变化感应的磁电电压值。本文中,锁定放大器同时给螺线管供交流电流,激发前文提到的振幅约h0≥10-2Oe的振荡场。
在全部的外加磁场H=H0+hac中,极化过程产生了形式为E=αE·H的电场,其中αE(=dE/d H=VME/hac·tPZT)为磁电电压系数。这个表达式仅在满足以下两个条件时有效:1)H0恒定;2)VME与hac具有线性关系。因此,导出如下磁电电压VME值[6]:

式中α是比例因子,其通常取决于材料性能和外加磁场;Voffset是依赖于h0的常量。有趣的是,VME(H0)的线性变化经常发生在低磁场域。
2 传感器特性
在磁电式地磁传感器的工作模式中,所有一维磁电式传感器的螺线管在自有谐振频率(101kHz附近)总是作为交流磁场信号发生器,并且它们(螺线管)全部由商用的数字信号处理(DSP)锁定放大器(Model 7265,Signal Recovery,Oak Ridge,TN,USA)的交流电源供电。地磁场充当了直流磁场H0的角色。但是,为了对组装的传感器进行磁场灵敏度测试,采用了由吉时利230电源供电的商用亥姆霍斯线圈来产生强度可达1.5Oe、精度为10-5Oe的类地磁场。后面的测试模式中,图2显示了观测到的S1和S2传感器的VME随直流磁场的变化曲线。虽然信号伴有较高的非零偏移值(46.7mV),但图2清楚地表明,在研究的磁场范围内,磁电电压与外加磁场具有线性变化关系。根据这个结果,可以获得式(1)中定义的传感器斜率α。对于传感器S1和S2,当磁场分辨率为3×10-4Oe时,它们的斜率分别为α1=310.2mV/Oe和α2=312.7mV/Oe。显然,传感器灵敏度偏差小于1%。

图2 两个一维磁电式传感器S1和S2的磁电电压随外加磁场的变化曲线
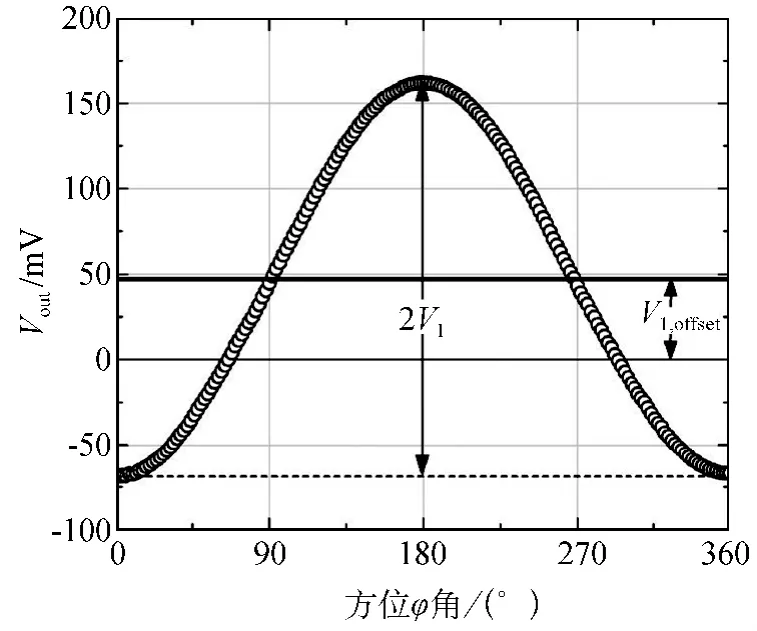
图3 磁电电压输出值与地磁场中磁电传感器方位角的关系
对于传感器的角度依赖性测试,直流磁场H0直接感应地磁场。图3显示了当传感器S1在水平面绕垂直z轴旋转时,其输出的VME与方位角φ的关系图。由图可清楚看出记录到的传感器信号与旋转角φ的余弦变化具有很好的一致性。另外,在此还观测到了前面提到的高非零偏移量。输出的VME在-66.7mV和163mV之间,分别对应于图2中的-0.399和0.399Oe的偏置场,同时很好地揭示了我们本地实验室环境(越南河内)的水平地磁场强度。
在信号处理和角度位置计算过程中,不仅要解决这个偏移的变化,而且还必须解决传感器灵敏度偏差的问题。在这种情况下,绘制传感器信号曲线的归一化处理如下[2]:

式中,Vi,norm、Vi,raw、Vi,offset和Vi,scale(其中i=1,2)分别代表磁电传感器S1和S2的归一化值、数字输出信号值、信号偏移量和标度值。
信号偏移量和标度值作为归一化因子,可由下列公式确定[2]:

式中,Vi,max和Vi,min(其中i=1,2)分别为磁电式传感器S1和S2的原始值Vi,raw的最大值和最小值。
3 硬件研制
地磁仪器的信号处理模块是在数字锁定放大器结构的基础上设计和研制的。图4显示的是当前研制的电路板图。硬件由4个主要部分构成:参考信号、输入信号、数字信号控制器和低通滤波器,它们由ARM Cortex-M4 32位处理器(型号STM32F407)来控制。
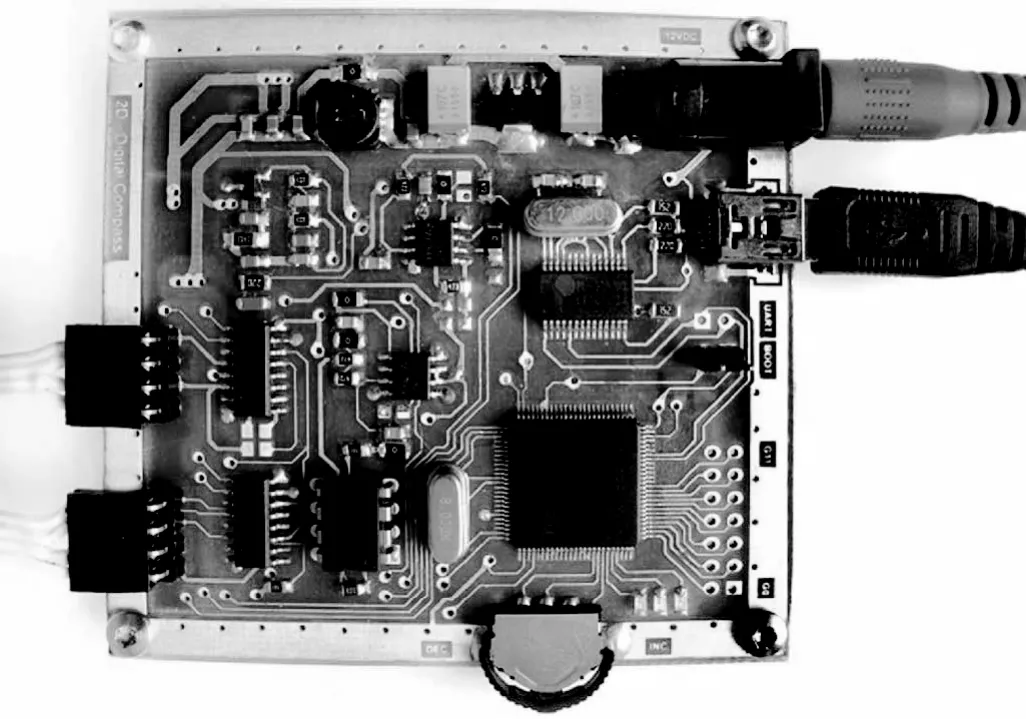
图4 当前研制仪器的电路板图

图5 所研制仪器的功能方框图
该仪器的主要功能框图显示在图5中。参考信号可从内部由12位数模转换器(DAC)的STM32F407微处理器产生。实际上,参考正弦波的频率范围为90~110kHz,与传感器的谐振频率一致。参考信号相移也为90°。其次,参考信号和相移参考值直接乘以数字信号处理器的信号,以产生同相(I)和正交(Q)信号来实现锁定放大器的相位敏感度检测功能。同时,参考信号还要用于激发两个传感器中螺线管的振荡磁场hac。
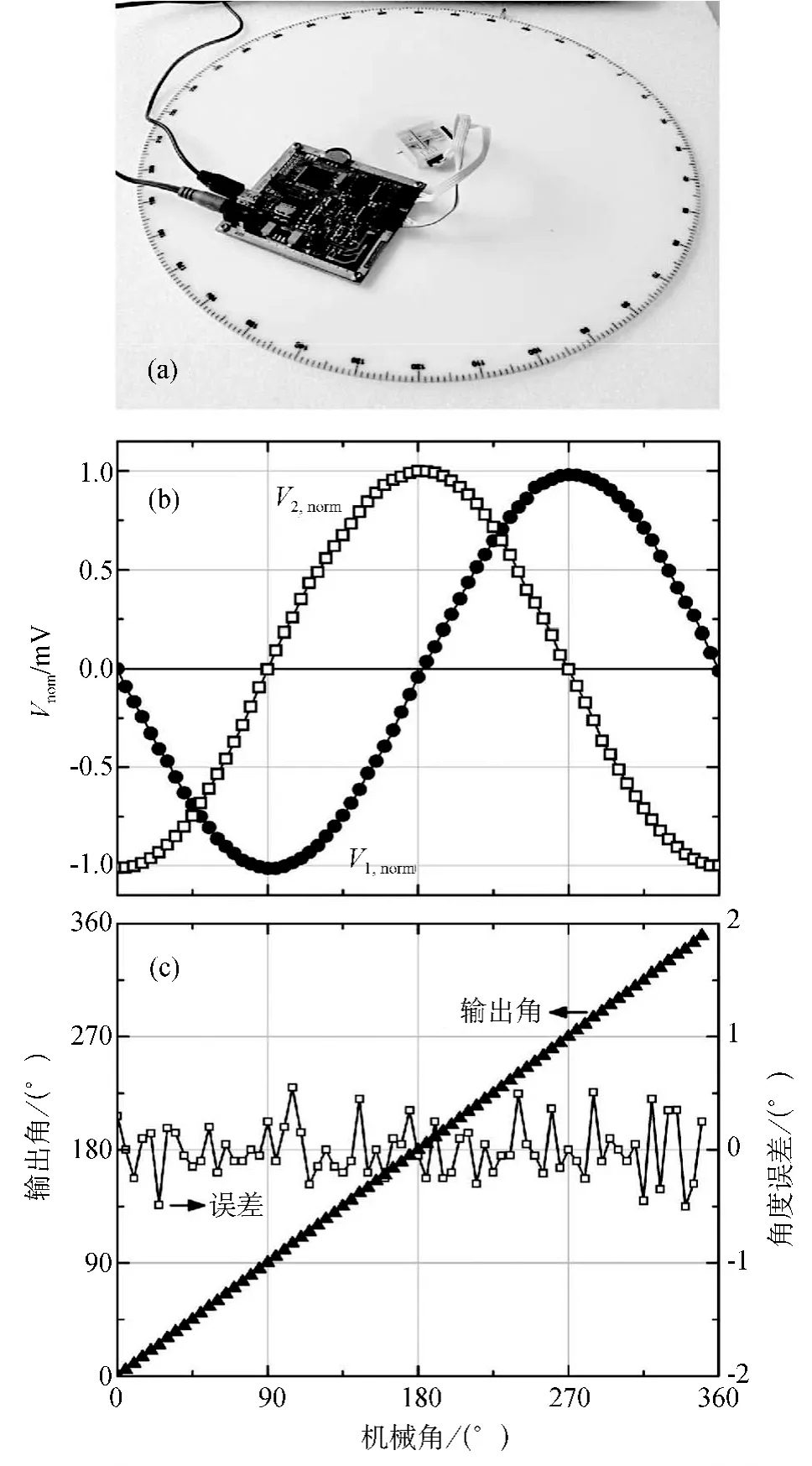
图6 (a)旋转实验系统的照片,(b)两个归一化信号V1,norm和V2,norm随旋转角φ变化的测试结果,(c)利用信号处理后V2,norm/V1,norm的比值的反正切函数计算的以度为单位的角度
首先,将输入的传感器信号传输到前端放大器的多路转换器。然后,用抗假信号滤波器消除高于半采样频率的所有信号分量。
在该仪器的数字信号处理模块中,通过高速模数转换器(ADC)将传感器信号转变为数字信号,然后直接乘以I和Q参考信号。最后,这些信号通过数字低通滤波器并完成抽取而产生最终输出值。每次均得到一对信号,最终的I和Q数据值直接转变成源信号相位或角度:
本电子仪器可将输出信号转换为格雷码以便与其他机电系统结合使用。
4 测试实验
当传感器模块分别绕垂直或水平轴旋转(图6a)时,同时计算方位角和倾斜角,对地磁仪器进行实验测试。
第一次测试,正如第2节中所述,传感器模块,即二维传感器围绕相应的旋转轴旋转一圈以计算归一化因子,例如根据磁电式传感器S1和S2各自原始信号V1,raw和V2,raw中的最大值Vi,max和最小值Vi,min计算偏移值Vi,offset和标度值Vi,scale(见公式3)。
每次测量,记录一对原始输出信号,并用公式(2)自动计算出相应归一化后的V1,norm和V2,norm值。图6(b)显示通过传感器系统在水平面内围绕垂直轴旋转测量的V1,norm和V2,norm随 φ角变化的实验结果。图6b清楚地表明两条曲线与旋转角φ的余弦和正弦函数具有很好的一致性,并且归一化后值的范围很好的集中在+1和-1之间。因此,将得到的结果转换为角度,显示在图6c中。图6c表明根据实验结果计算的角度与旋转角φ角具有完美的线性关系,其斜率精确地等于1。旋转一圈时根据实验结果计算的角度的精度为±0.5°。
在垂直平面沿水平轴旋转传感器系统时,对倾角θ的确定获得了相似的结果。
5 结论
基于金属玻璃/压电叠层复合材料研制出了磁电式二维地磁传感器。通过使用自制的数字锁定放大器,充分激发并检测传感器信号。将该二维地磁传感器模块与硬件成功集成使绘制输出传感器的信号和精确计算角度有归一化的性能。传感器装配后所达到的灵敏度和分辨率使得该地磁仪器有可能应用到新颖的智能罗盘和定位装置中。尤其是,旋转传感器模块时,可以自动计算出空间方位角和倾斜角。为了自动确定和控制相对于地球同步卫星位置的无线电收发机天线的方向,在实验室中这种简单而价格低廉的地磁仪器正在与移动无线电收发机结合使用。对于未来的发展,为了增加角度灵敏度,必须避免和/或补偿机械偏差。在这种情况下,完全集成的三维地磁传感器可能是一个好的解决方案。
[1]S.Lozanova and C.Roumenin,“Angular position device with 2Dlow-noise hall microsensor,”Sens.Actuators A,Phys.,vol.162,pp.167-171,Aug.2010.
[2]M.Ipatov,V.Zhukova,J.M.Blanco,A.Zhukov,and J.Gonzalez,“1Dand 2Dposition detection using magnetoimpedance sensor array,”Phys.Stat.Sol.(a),Sep.2012,28358.
[3]F.Burger,P.-A.Besse,and I.R.S.Popovic,“New fully integrated 3-D silicon hall sensor for precise angular-position measurements,”Sens.Actuators A,Phys.,vol.67,pp.72-76,May 1998.
[4]W.J.Lee and S.Choi,“Geomagnetic sensor for computing azimuth and method thereof,”U.S.Patent 2007/0119061A1,May 31,2007.
[5]M.Paranjape,L.M.Landsberger,and M.Kahrizi,“A CMOS-compatible 2-D vertical hall magnetic-field sensor using active carrier confinement and post-process micromachining,”Sens.Actuators A,Phys.,vol.53,pp.278-283,May 1996.
[6]N.H.Duc and D.T.Huong Giang,“Magnetic sensors based on piezoelectric—Magnetostrictive composites,”J.Alloys Comp.,vol.449,pp.214-218,Jan.2008.
[7]D.T.Huong Giang and N.H.Duc,“Magnetoelectric sensor formicrotesla magnetic-fields based on(Fe80Co20)78Si12B10/PZT laminates,”Sens.Actuators A,Phys.,vol.149,pp.229-232,Feb.2009.
[8]L.Ding,J.Teng,X.C.Wang,C.Feng,Y.Jiang,G.H.YuS.G.Wangand R.C.C.WardDesigned synthesis of materials for high-sensitivity geomagnetic sensors,”Appl.Phys.Lett.,vol.96,Feb.2010,052515.
[9]D.T.Huong Giang,P.A.Duc,N.T.Ngoc,N.T.Hien,and N.H.Duc,“Geomagnetic sensors based on metglas/PZT laminates,”Sens.Actuators A,Phys.,vol.179,pp.78-82,Jun.2012.
[10]Y.Fetisov,A.Bush,K.Kamentsev,A.Ostashchenko,and G.Srinivasan,“Ferrite-piezoelectric multilayers for magnetic field sensors,”IEEE Sens.J.,vol.6,no.4,pp.935-938,Aug.2006.