连续波测速雷达信标测速数据的处理*
2015-12-24钟水和胡松柏王正军罗鹏飞
钟水和,胡松柏,王正军,罗鹏飞
(中国酒泉卫星发射中心,甘肃 酒泉 732750)
1 引言
连续波测量系统由箭上多测速应答机和地面连续波测速雷达组成,完成对导弹、航天器的轨道的高精度跟踪测量[1-2]。连续波测量系统应答机具有应答和信标两种测量模式。在应答测量模式下,测速雷达发站发送上行信号,测速雷达收站接收应答机转发的下行信号,测量发站到目标与目标到收站的距离和变化率;在信标测量模式下,测速雷达发站不发送上行信号,测速雷达收站接收应答机自主发送的下行信号,测量目标到收站的距离变化率,与发站上行信号无关。
目前,首区只有一个测速雷达发站,多测速应答机通常一个通道(f1频点)工作在应答测量模式,另一个通道(f2频点)工作在信标测量模式。在信标测量模式下,测速雷达测量的速度信息存在较大的系统误差,不能直接用于目标的速度解算。但是,当测速雷达发站上行信号出现故障时,系统就只能工作在信标测量模式。
本文研究了基于直接法和间接法的连续波测速雷达信标测速数据的综合求解方法,得到了目标在地心系下速度分量,并与应答测速数据比对,为靶场测速雷达信标测速数据处理提供依据。
2 多测速应答机工作原理
相参应答机的下行载波信号的相位跟随着上行载波信号的相位变换。当多测速应答机工作于应答测量模式时即处于相参模式,工作于信标测量模式时即处于非相参模式。
多测速应答机是相参应答机,它不仅要完成接收信号的放大以增加作用距离,还需要将信号的频率做变换,使下行载波频率和上行载波频率错开,解决地面测量设备的收发隔离问题。
高精度相参应答机设计成固定中放相参应答机[3],其鉴相器的参考信号是外加的中频信号Fx,保证中放没有多普勒频移通过,保持中频固定不变,其原理框图如图1 所示。
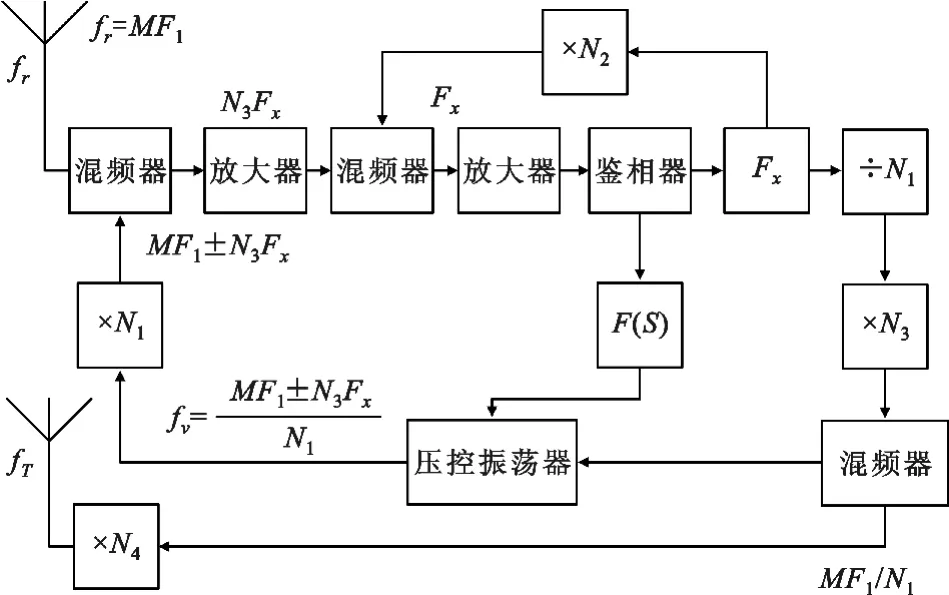
图1 固定中频相参应答机原理框图Fig.1 Principle block diagram of fixed intermediate frequency of coherent transponder
当应答机工作在应答测量模式时,接收信号频率fr=MF1(F1为基频,M 为倍频次数),压控振荡器频率fv=(MF1±N3Fx)/N1(N1、N3为倍频次数),第1 混频器的本振频率f01=MF1±N3Fx,相位检波器的参考频率Fx由固定振荡器提供,固定振荡频率Fx乘N2次作为第2 混频器的本振信号。当环路锁定时,第1 中放频率fi1=N3Fx和第2 中放频率fi2=Fx都固定不变。当输入信号频率fr变化时,第1 本振无失真地跟踪,使环路维持锁定。当固定振荡器的频率Fx偏移时,压控振荡器的频率fv以N3Fx/N1的变化率而变化,以保持相参接收机的相差性。应答机的转发信号由激励信号倍频N4次获得,载波相干转发比为N4/N1。
当应答机工作在信标测量模式时,由于没有接收上行信号,其锁相环路处于开环状态。应答机发送的信号由本地独立的信号源(压控振荡器)提供,其输出信号相位与应答测量模式下上行信号的相位无关,存在初始相位误差,由此引入所测距离变化率的系统误差。
3 信标测量模式多普勒频率处理

各测速雷达与测量目标的距离Ri(t)和距离变化率(t)如下式所示:
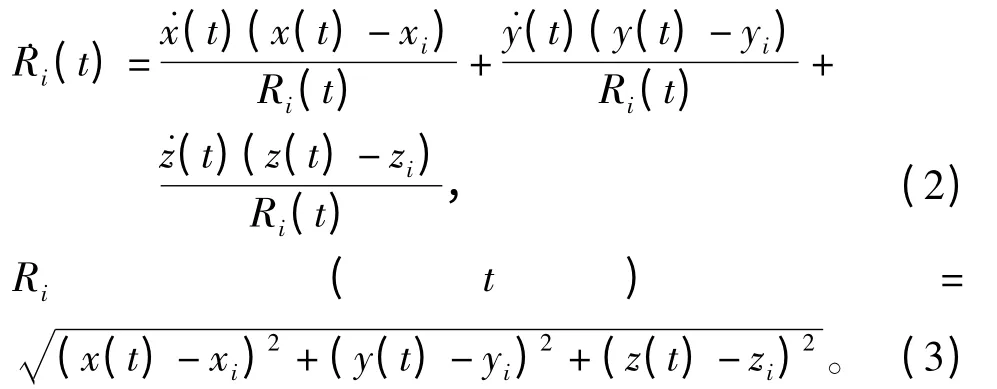
式(2)和式(3)中,(xi,yi,zi)为第i 个测速雷达的站址坐标。
各测速雷达与目标连线的方向余弦[li(t)mi(t)ni(t)]T为
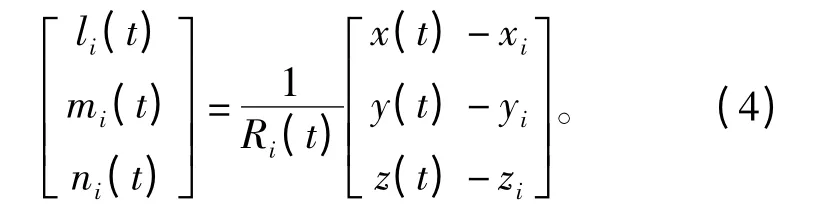
采用最小二乘法计算目标速度变化率,将多台测速雷达的方向余弦按顺序组合成连续波测量系统方向余弦矩阵A:
则

式中,位置分量(x,y,z)由脉冲雷达单站定位或理论弹道提供。各测速雷达的接收信号是由同一个应答机自主发送的,相同时刻各测速雷达接收信号的初始相位变化率(t)应相同。
3.1 直接法
直接法预先测量双频多测速应答机信标测量模式输出信号的初始相位变化率(t),并建立(t)随时间变化的模型,完成多台测速雷达的综合求速,即RAE+4。
测速雷达主站、副1 站、副2 站和副3 站布置于实心圆点,火箭发射工位布置于菱形点,火箭朝着虚线方向发射,如图2 所示。根据各测速雷达和发射工位的地势环境,主站、副2 站和副3 站均能有效通视发射场,在火箭起飞前均能接收多测速应答机信标测量模式的下行信号,同时,副3 站由于距离较近,其接收信号功率较强。
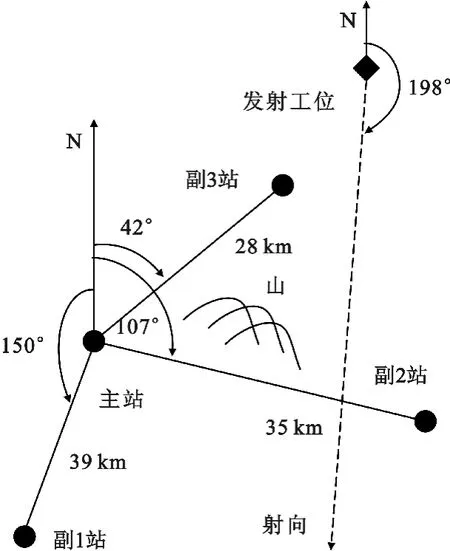
图2 测速雷达布站和火箭射向示意图Fig.2 Sketch map for deployment of velocity radar and vehicle orientation launch
从图1 应答机工作原理中可知,当应答机没有输入信号即测速雷达主站的上行信号时,接收环路处于失锁状态。应答机自主发射的信标信号来源于压控振荡器,其输出的频率随时间变化存在而缓慢漂移的趋势[7-8]。文献[9]中针对晶振器件老化、随机噪声等因素影响,构建了晶振频率随时间变化的测量系统,对起飞前30 s内的测量数据进行一元回归统计处理,分离出了晶振实际频率和标称频率的相对误差及各种随机误差,并采用F 检验法对回归方程进行显著性检验。
测速雷达副3 站从接收到的多测速应答机信标信号中提取的多普勒频率(距离变化率)曲线如图3所示,图中横坐标为相对时,其在起飞零时之前的时刻认为数值是负。由于火箭起飞前,测速雷达和目标相对位置保持不变,其接收的多普勒频率为多测速应答机的初始相位变化率。从图3 中可知,测速雷达接收的多普勒频率随相对时变化,近似一条直线。
本文中采用线性估计的方法[10-11]分析起飞零时前的多普勒频率变化趋势,预测起飞后各相对时刻的初始相位变化率(t),从而准确获取目标和测速雷达收站之间的距离变化率,进而采用式(6)计算目标x、y、z 方向的速度分量。
3.2 间接法
间接法是对各测速雷达副站接收的距离变化率与主站的相减,得到距离差变化率(t)。在同一时刻,各测速雷达接收多测速应答机的下行信号相同,即信标信号的初始相位变化率(t)也相同。采用间接法扣除初始相位变化率误差,解算目标x、y、z方向的速度分量,即RAE+3。
由式(1)可得,各副站与主站的距离差变化率为
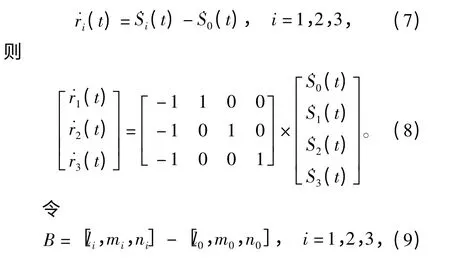
则

间接法无需估算多测速应答机信标信号的初始相位变化率(多普勒频率),计算更加方便。
3.3 试验验证
各测速雷达布站和火箭射向示意图如图2 所示。各测速雷达同时接收多测速应答机的应答测速信号和信标测速信号。应答测量模式是当前采用的处理方法,本试验中,采用应答测速信号求出目标在地心系下x、y、z 3 个方向的速度分量,并认为其是目标真实的速度分量。同时,采用直接法和间接法分析各测速雷达的信标测速数据,并分别与应答测量模式对比,得出在该测速雷达布站和火箭射向下信标测速数据处理宜采用的方法。
直接法和间接法综合求速的速度分量与应答测量模式速度分量的差值曲线如图4 和图5 所示。

图4 直接法与应答测量模式速度分量差值曲线Fig.4 Differential curve of component velocity in direct beacon mode and respond mode
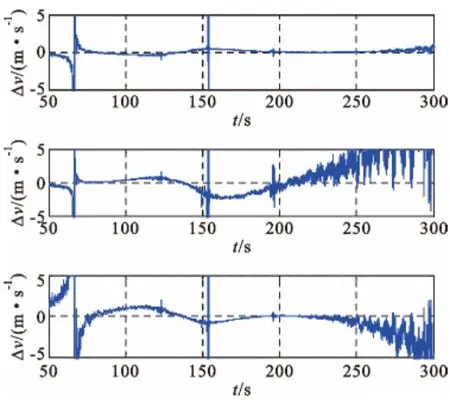
图5 间接法与应答测量模式速度分量差值曲线Fig.5 Differential curve of component velocity in indirect beacon mode and respond mode
图4 和图5 中,从上到下依次为x、y、z 方向的速度分量的差值曲线。其中,直接法求的速度分量在y 方向最大,为1 m/s,x 方向最小,为-0.3 m/s;间接法求的速度分量在70~200 s内误差稍好,除x方向外均超过1 m/s,200 s后出现振荡发散,超过5 m/s。对比可知,在该布站模式和火箭射向条件下,采用间接法求解的信标测速信号的速度分量误差高于直接法求解的速度分量误差。
从式(1)和式(10)可看出,在进行速度分量求解时,需要对误差传递矩阵[4](方向余弦矩阵A 和B)求逆,其行列式大小直接影响速度解算精度。
将三种方法误差传递矩阵的行列式作图,如图6所示,从上到下依次为应答测量模式、信标测量模式直接法和信标测量模式间接法传递矩阵的行列式。
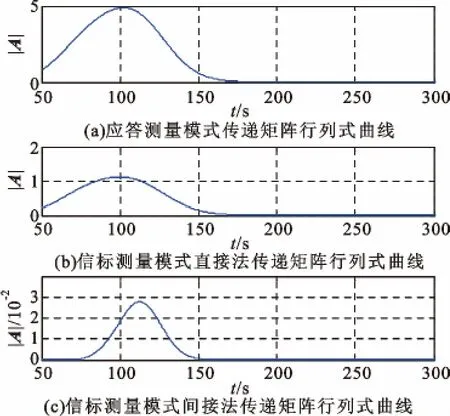
图6 误差传递矩阵的行列式曲线Fig.6 Determinant curve of errors transferring matrix
误差传递矩阵是由测速雷达的布站模式和射向条件决定的。对照图4~6,误差传递矩阵的行列式越小,所求解的速度分量差值越大,并且呈发散趋势。
4 结论
本文采用直接法和间接法实现了多台测速雷达信标测速数据的综合求速。通过研究连续波测速雷达信标测量模式下的多普勒频率处理方法,不仅有效运用了测速雷达的所有测量数据,而且通过综合求解信标测速数据可以增加一路目标速度信息,实现对应答测速数据的冗余备份,大大提高连续波测速雷达完成试验任务的能力。
[1]贾兴泉.连续波雷达数据处理[M].北京:国防工业出版社,2005.JIA Xingquan.Continuous-Wave Radar Data Processing[M].Beijing:National Defense Industry Press,2005.(in Chinese)
[2]丁鹭飞,耿富录,陈建春.雷达原理[M].北京:电子工业出版社,2009.DING Lufei,GENG Fulu,CHEN Jianchun.Radar Principle[M].Beijing:Publishing House of Electronics Industry,2009.(in Chinese)
[3]赵业福.无线电跟踪测量[M].北京:国防工业出版社,2003.ZHAO Yefu.Wireless Tracking and Measuring[M].Beijing:National Defense Industry Press,2003.(in Chinese)
[4]崔书华,胡绍林,王敏,等.多测速系统测速差分计算及误差分析[J].飞行力学,2011,29(6):89-93.CUI Shuhua,HU Shaolin,WANG Min,et al.Difference algorithms and error analysis of velocity data from multivelocity measurement system[J].Flight Dynamics,2011,29(6):89-93.(in Chinese)
[5]崔书华,罗秀娟.各高速摄影仪跟踪测量数据时间一致性检验方法及准确分析[J].光子学报,2004,23(12):1490-1492.CUI Shuhua,LUO Xiujuan.Measurement Data of High Speed Photography Metrical System Detect in Time Synchronization and Precision Estimation[J].Acta Photonica Sinica,2004,23(12):1490-1492 (in Chinese)
[6]郭军海,吴正容,黄学德,等.多测速雷达弹道测量体制研究[J].飞行器测控学报,2002,21(3):5-11.GUO Junhai,WU Zhengrong,HUANG Xuede,et al.Study of Multi-velocity radar trajectory measurement[J].Journal of Spacecraft TT&C Technology,2002,21(3):5-11.(in Chinese)
[7]刑小明.OCXO 频率慢漂对PD 雷达性能影响分析[J].现代雷达,2006,28(7):83-84.XING Xiaoming.Analysis of Influence on PD Radar of OCXO’s Frequency shift[J].Modem Radar,2006,28(7):83-84.(in Chinese)
[8]刘嘉兴.测控系统中振荡器短稳对测速精度的影响[J].电讯技术,2005,45(1):85-90.LIU Jiaxing.Effect of Short Term Frequency Stability of Oscillators on the Velocity Precision in a TT&C System[J].Telecommunication Engineering,2005,45(1):85-90.(in Chinese)
[9]李二鹏,文开章,冯保红,等.石英晶体振荡器频率特性的测量与分析[J].测控技术,2010,29(1):81-83.LI Erpeng,WEN Kaizhang,FENG Baohong,et al.Measurement and Analysis of Characteristic of Quartz Crystal Oscillator Frequency[J].Measurement & Control Technology,2010,29(1):81-83.(in Chinese)
[10]刘利生.外弹道测量数据处理[M].北京:国防工业出版社,2002.LIU Lisheng.Exterior Trajectory Measuring Data Processing[M].Beijing:National Defense Industry Press,2002.(in Chinese)
[11]马顺南,李福才,李华敏.多站制连续波高精度测量体制研究[J].电讯技术,2006,46(5):161-164.MA Shunnan,LI Fucai,LI Huamin.Study on Multi-Station Continuous Wave(CW)High-Accuracy Measurement System[J].Telecommunication Engineering,2006,46(5):161-164.(in Chinese)