光学测风经纬仪模拟训练系统设计
2015-12-23马林,张本成,郭延松
【装备理论与装备技术】
光学测风经纬仪模拟训练系统设计
马林,张本成,郭延松
(沈阳炮兵学院 电子侦察系,沈阳110867)
摘要:针对光学测风经纬仪实装训练过程中训练效果差、考核手段匮乏,器材、物资消耗大等问题,设计了光学测风经纬仪模拟训练系统;采用单片机、传感器和串口通信等技术设计了中央控制模块、光电转换电路等硬件系统,采用模块化和视景仿真等技术设计了硬件控制软件、系统管理软件和视景仿真软件等软件系统,实现了光学测风经纬仪调平、测风气球跟踪等操作的全仿真模拟和成绩评判,对提高光学测风经纬仪的训练质量和效率具有重要的现实意义。
关键词:光学测风经纬仪;模拟训练;单片机;视景仿真
作者简介:马林(1983—),男,硕士,讲师,主要从事弹道气象研究。
doi:10.11809/scbgxb2015.06.005
中图分类号:TP391.9
文章编号:1006-0707(2015)06-0018-03
收稿日期:2014-12-20
基金项目:航空
本文引用格式:马林,张本成,郭延松.光学测风经纬仪模拟训练系统设计[J].四川兵工学报,2015(6):18-20.
Citation format:MA Lin, ZHANG Ben-cheng, GUO Yan-song.Design of Optical Wind-Finding Theodolite Simulation Training System[J].Journal of Sichuan Ordnance,2015(6):18-20.
Design of Optical Wind-Finding Theodolite Simulation Training System
MA Lin, ZHANG Ben-cheng, GUO Yan-song
(Department of Electronic Reconnaissance, Shenyang Artillery Academy of PLA, Shenyang 110867, China)
Abstract:Aiming at the issues that optical wind-finding theodolite’s training effect is poor and lack of assessment tools, and great equipment, material consumption and other issues, we designed the optical wind-finding theodolite simulation training system. Using single chip microcomputer, sensor and communication technology, we designed the central control module, a photoelectric conversion circuit and other hardware system. Using modular and visual simulation technology, we designed the control software, system management software, the visual simulation software and other software system. And we realized the optical wind-finding theodolite leveling and balloon tracking operation’s the full simulation and performance evaluation. It has important practical significance for improving optical wind-finding theodolite of the training quality and efficiency.
Key words: optical wind-finding theodolite; simulation training; singlechip; visual simulation
光学测风经纬仪是跟踪、测定空中气球的方位角和仰角,用以计算空中风向和风速的光学仪器,通常由光学望远镜、转动机构、读数装置、水准器以及三脚架等部分组成[1]。由于光学测风经纬仪是依靠操作员人工跟踪目标,手动或自动采集角度数据,所以对操作员的操作技能要求较高,必须经过大量的训练才能有效地使用该仪器进行高空风观测。但气象条件是瞬息万变的,在操作员进行实装训练或考核时,由于无法获得权威的观测真值,造成难以对操作员的训练效果进行评价和检验,影响了训练效果,并且实装训练中对制氢原料、测风气球等物资器消耗较大,造成培养熟练操作员的周期较长,费用较高。因此,开发基于视景仿真技术的光学测风经纬仪模拟训练系统,在节约训练经费、推广模拟仿真训练技术和提高综合训练效果等方面具有重要的现实意义[2]。
1系统组成及工作原理
光学测风经纬仪模拟训练系统主要由管理系统和训练终端两大部分组成,如图1所示。
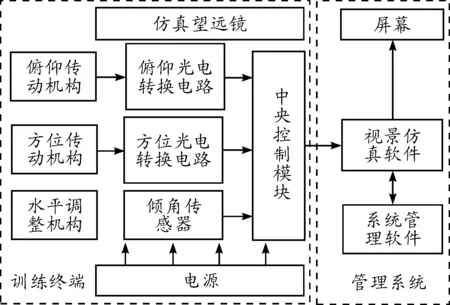
图1 系统组成
模拟管理系统为一台式计算机,在其中部署系统管理软件和视景仿真软件。进行模拟训练时,通过系统管理软件生成一系列代表测风气球坐标的仰角、方位角和高度数据,并通过进程通信方式发送给视景仿真软件。视景仿真软件通过可视化视景仿真技术对气象观测环境进行模拟仿真,根据测风气球坐标数据实时更新测风气球在虚拟场景中的空间坐标位置,并通过投影仪投射到屏幕上进行显示。
训练终端在外形机械结构上同光学测风经纬仪实装相同,当参训人员操作与俯仰、方位光电转换电路相连接的俯仰、方位传动机构时,俯仰、方位光电转换电路会测量出当前训练终端的俯仰和方位角度,并发送给中央控制模块,经中央控制模块处理后通过串口发送给视景仿真软件,视景仿真软件根据训练终端的俯仰和方位角度调整虚拟场景的视角,从而实现对测风气球的模拟跟踪训练。通过比较系统管理软件产生的测风气球坐标数据和训练终端测量的数据进行跟踪技能评判,通过倾角传感器测量训练终端的水平情况进行调平技能评判。
2硬件系统设计
2.1中央控制模块
中央控制模块由微处理器和现场可变成逻辑门阵列(FPGA)组成。微处理器芯片选用TI公司的MSP430-149型16位单片机,其具有12位200 kb/s的模/数转换器,60 KB内部程序存储器(Flash-ROM)和2 KB数据存储器(RAM)[3]。FPGA选用低功耗ACEX1K50器件,该器件由逻辑阵列块、嵌入式阵列块、快速互联以及I/O单元构成[4]。
当俯仰、方位转换电路和倾角传感器送入角度信号后,MSP430-149单片机通过FPGA内设的方位、俯仰和倾角测量接口等逻辑接口采集角度数据,并利用内置的ADC12模/数转换模块实现数据的模/数转换,通过两个相互独立的发送、接收缓冲器和移位寄存器来实现与管理系统的串口通信。
2.2光电转换电路
硬件系统中设置了方位和俯仰两套光电转换电路,都由光电编码器和角度信号处理电路组成。光电编码器是用光电方法把被测角位移转换成以数字代码形式表示的电信号的转换部件[5],光电编码器的转轴与训练终端的传动机构连接,当传动机构带动转轴旋转时,光电编码器内部的码盘与指示光栅产生相对位移,产生幅度与转动角度成正比的连续波电信号,送入角度信号处理电路。角度信号处理电路将光电编码器送入的角度信号放大、整形,输出相位差为90°的A、B两路矩形波信号。经过判向后,得到符合角度测量精度的脉冲信号,送入中央控制模块。
2.3倾角传感器
倾角传感器采用RION公司的SCA1900型双轴倾角模块。该传感器采用VTI MEMS控制单元,通过测量静态重力场变化,转换成倾角变化,分辨率为0.002 5°。倾角传感器固定在训练终端内部刚性好、不易变形的基准面上,并和训练终端水平保持一致。工作时倾角传感器实时测量当前的姿态倾角数据,并以0~5 V直流电压的方式送入中央控制模块。
2.4按键电路
根据系统功能,设置了开机、关机、放球和实时4个按键,键盘通过具有中断的I/O接口直接和单片机连接,并通过680 kΩ的上拉电阻和3.3 V电源连接。利用I/O接口的中断功能,当有按键按下时,P1口相应中断标志位置1,并向单片机申请中断,这时单片机转入中断子程序对按键进行处理。
3软件系统设计
3.1硬件控制软件
目前,各种类型软件的使用无处不在[6],光学测风经纬仪模拟训练系统的单片机中也部署着硬件控制软件,软件采用面向对象的C语言编制,模块化设计结构,软件编写时针对MSP430-149型单片机硬件特点和各寄存器的特性进行编程,程序主流程如图2所示。
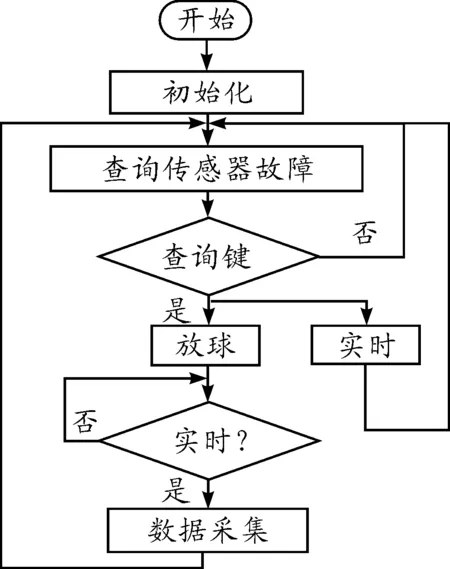
图2 硬件控制软件主流程
3.2系统管理软件
系统管理软件部署在模拟管理系统中,运行环境为Windows XP操作系统,采用Visual C++6.0作为开发平台。系统管理软件能够实现以下功能:
1) 对登陆的用户进行验证,验证的内容包括用户名和密码的正确性、用户的权限。
2) 对模拟训练习题库进行添加、删除、修改等管理,结合分布开放式数据库实现探测资料向模拟训练习题的自动转化。
3) 能够通过曲线拟合方法生成测风气球实时坐标数据,并能通过动态参数设置控制模拟训练的难度。
4) 能够判断操作员调平及跟踪操作的准确性,并可进行训练成绩评估。
5) 完成成绩档案查询、调用和打印功能。
6) 对管理人员和操作人员的用户名、密码和所属单位等信息进行添加、删除、修改等管理操作。
系统管理软件流程如图3所示。
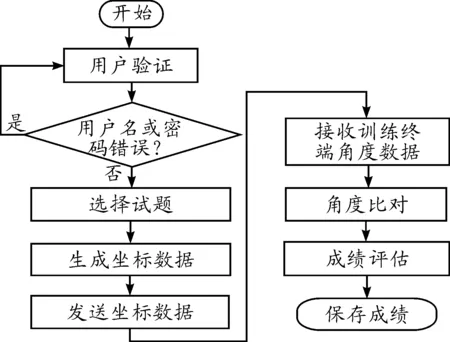
图3 系统管理软件流程
3.3视景仿真软件
视景仿真软件部署在模拟管理系统中,用于光学测风经纬仪模拟训练系统虚拟场景的构建。软件采用Visual C++6.0作为开发平台,通过3D MAX软件进行测风气球等模型建模,同时结合三维图形语言OpenGL进行设计。
虚拟场景采用基于OpenGL的天空盒的方法进行建立,该方法通过对六边形方盒进行纹理贴图,从而建立仿真环境。虚拟场景构建过程中,先建立地面所在平面,然后在此平面上建立其他5个平面,并贴上天空背景图片。用于天空背景的图片要求4面图的边与顶图的边相连,4面图前后相连。
为了能够使虚拟场景中的视角随着训练终端的仰角、方位角变化而变化,采用OpenGL中的gluLookAt()函数实时更新视角。gluLookAt()函数定义如下:
gluLookAt(GLdouble eyex,GLdouble eyey,GLdouble eyez,GLdouble centerx,GLdouble centery,GLdouble centerz,GLdouble upx,GLdouble upy,GLdouble upz)
前3个变量用于指定光学测风经纬仪模型在虚拟场景中的位置,中间3个变量用于确定光学测风经纬仪视角的朝向,最后3个变量用于确定哪个方向是朝上的。视景仿真软件根据模拟终端发送来的角度数据,实时更新gluLookAt()函数中的中间3个变量即可实现虚拟场景视角的变换。
为了避免视角更新及测风气球模型运动过程中出现的“抖动”问题,在像素格式中定义双缓存模式,这样OpenGL就会选择在后台缓存进行绘制,再在绘制函数中通过SwapBuffers()函数[7]实现双缓存图像的刷新。视景仿真软件构建的虚拟场景如图4所示。

图4 模拟训练虚拟场景
4结束语
本文采用单片机、传感器和视景仿真等技术,对光学测风经纬仪模拟训练系统进行了设计,系统结构设计合理、集成度高、模拟效果逼真,成绩评定科学,可解决光学测风经纬仪训练考核评判客观性、准确性差等问题,有利于提高训练效率、缩短培训周期、节约训练经费,具有良好的军事经济效益和广阔的推广前景。
参考文献:
[1]李福林.军事气象[M].北京:中国大百科全书出版社,2010:78.
[2]于正林,谭微,姜涛.基于视景仿真的光电经纬仪模拟训练器[J].吉林大学学报:工学版,2011,41(2):509-511.
[3]李智奇,白小平,陈晓龙,等.MSP430系列超低功耗单片机原理与系统设计[M].西安:西安电子科技大学出版社,2008:10.
[4]李桂花,乔为民,敬岚.基于ACEX1K50的HIRFL-CSR同步处理器设计[J].原子能科学技术,2011,45(7):856-859.
[5]徐科军.传感器与检测技术[M].北京:电子工业版社,2004:78.
[6]仝海燕,吕洪善,贾爽.白盒测试之基本路径测试技术探析[J].重庆工商大学学报:自然科学版,2014,31(1):65-68.
[7]徐亮.基于OpenGL的海战场视景仿真系统[J].计算机与数字工程,2010,243(1):87-90.
(责任编辑周江川)
