深水养殖水质数据采集监测系统
2015-12-22闫秀英广东海洋大学信息学院广东湛江505广东医学院附属医院广东湛江500广东海洋大学水产学院广东湛江505中国海洋大学网络中心山东青岛66033
陈 亮,江 涛,闫秀英,徐 元,邓 锐(.广东海洋大学信息学院,广东湛江505;.广东医学院附属医院,广东湛江500;3.广东海洋大学水产学院,广东湛江505;.中国海洋大学网络中心,山东青岛66033)
深水海域远离海岸且相对开放,水质较好,海水流动性好、自净化能力也较强。国外以挪威为代表的深水网箱养殖取得了巨大成功,相比传统网箱养殖,深水网箱养殖取得更显著的经济效益、生态效益。目前国家和各级政府投入了大量资金开展深水网箱养殖的引进、吸收、开发,先后在山东、浙江、广东、海南等地取得了许多成功经验,使深水网箱养殖技术成为海产品养殖发展的趋势。全面发展深水网箱养殖,是转变渔业经济发展方式的重要途径,是提升渔业产业核心竞争力的重要载体,是引领渔民增收致富的重要渠道,是优化海洋生态环境的重要举措。虽然深水海域海水流动性比较好,但仅仅通过海水流动性无法改善深水养殖场区的水质[1]。为了探索深水网箱养殖对养殖海域环境的实际影响,为理论研究和科学养殖提供可靠、有效数据[2-3],笔者介绍了一种基于北斗“短信息”服务的水质采集、监测方法,实时、动态采集水质数据。
1 系统构成
传统的数据采集方式主要有2种:一是人工采集;二是基于无线通信网络的方式采集。人工采集方式无法做到全天候、实时采集,而且人力成本也比较高;而无线方式采集又严重受制于移动网络覆盖范围[4-5]。
针对北斗卫星导航系统覆盖范围也比较广[6-8],同时可以提供有效的报文服务,因此设计了一个基于北斗报文信息服务的实时深水养殖水质数据采集系统(图1)。
将深水养殖区多参数水质传感器采集到的海水pH、水温、盐度、溶解氧、氮、磷等水质数据,及时可靠地经由北斗卫星系统传输回数据处理中心,数据处理中心接收数据后,将接收后的数据信息解析后存入水质因子数据库,并进行处理,如果发现超出阈值预警范围或系统设置要求,再次将数据信息及预警信息通过移动通信网发送到相关管理人员的手机。相关管理人员根据当前水质情况,可以经由移动通信网络或互联网及时将相关指令传回数据处理中心,如提高水质采集频率、修改水质预警阈值范围等,数据处理中心在接收用户指令后,通过北斗导航系统,将相关指令送达深水养殖中心站,中心站立即执行相关指令修改或查询。

图1 系统整体设计框图
1.1 北斗导航系统 北斗卫星导航系统是我国自行研制的全球卫星定位与通信系统(BDS),是继美全球定位系统(GPS)和俄GLONASS之后第三个成熟的卫星导航系统。系统由空间端、地面端和用户端组成,可在全球范围内全天候、全天时为各类用户提供高精度、高可靠定位、导航、授时服务,并具有短报文通信能力[9]。
1.2 北斗“短信息”服务 北斗星通公司的北斗定位通信终端模块指令根据不同的功能分为6类,分别为状态类指令、定位类指令、通信类指令、查询类指令、授时类指令和GPS类指令。通信内容以指令的方式表示,指令内容用ASCⅡ码编码,信息以字符串形式进行传输。基于此,设计了一种北斗导航系统的北斗“短信息”服务,用于传输数据信息和指令信息。
1.3 采集系统 深水养殖中心环境采集系统如图2所示。数据采集端的核心控制采用nRF24le1模块,利用模块上的集成单片机作为主控制芯片,模块上的集成无线芯片进行短距离的无线数据传输,采用防水封装的多参数水质传感器进行水质参数数据采集。系统的供电主要采用大容量的锂电池和太阳能电池进行供电。
中心站和各分站之间采用查询响应模式,中心站为主模块,各分站为从模块,各从模块响应主模块指令操作。其中从模块主要用于定时发送多参数水质传感器采集到的水质数据和响应主模块的各种指令请求,如查询指令、设置指令等,主模块将各从模块采集到的水质数据按一定格式编码并经由北斗导航卫星网络发往地面数据处理中心。
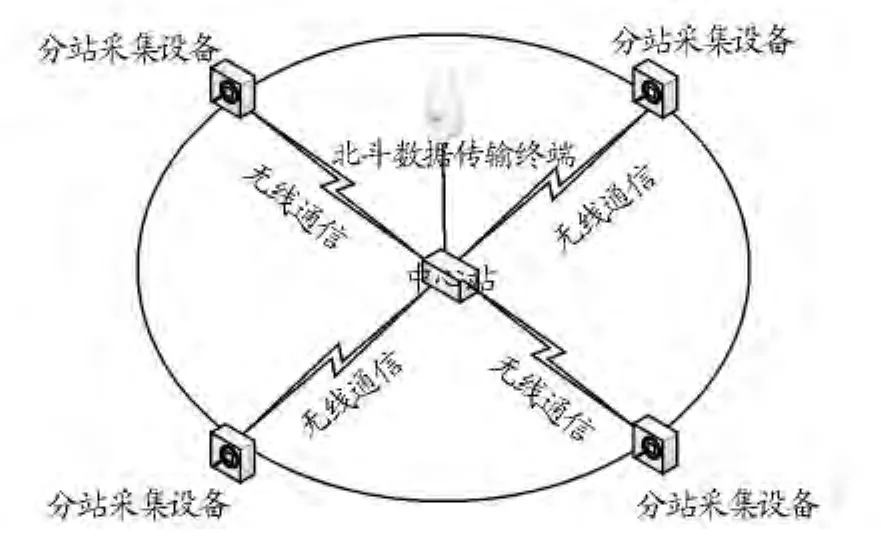
图2 环境采集系统
1.4 数据接收中心 数据中心对接收到的水质数据信息进行解析处理,存入水质因子数据库,并实时形成各种水质数据曲线,当某项水质数据超过预设的阈值,数据中心系统将通过短信网关给相关管理人员发送预警信息。相关管理人员也可以根据需要使用自己的手机或互联网查询水质信息,或给数据处理中心系统发送相关指令信息,如提高采样频率、查询当前监测数据等,数据处理中心接收到相关指令信息后,使用北斗发送阵列将相关指令实时反馈给水质环境采集子系统的中心站进行响应处理。
2 采集系统
2.1 北斗接口模块 主控端与北斗定位通信模块连接如图3所示。BDG-MF-06型数据传输终端主要是针对远程数据采集自动传输领域设计的一款北斗终端产品。它采用的是标准的RS232接口,参数如下:
①传输速率:119 200 bps。
②传输格式:1 bit开始位,8 bit数据位,1 bit停止位。
2.2 软件处理流程 该系统由分站模块和中心站模块两部分组成,2个模块之间采用无线通信模块进行组网通信。其中分站模块,主要用于响应中心站指令请求,进行水质数据采集工作,同时将采集到的数据经由三无线通信模块发送回中心站。中心站模块工作流程如图4所示。
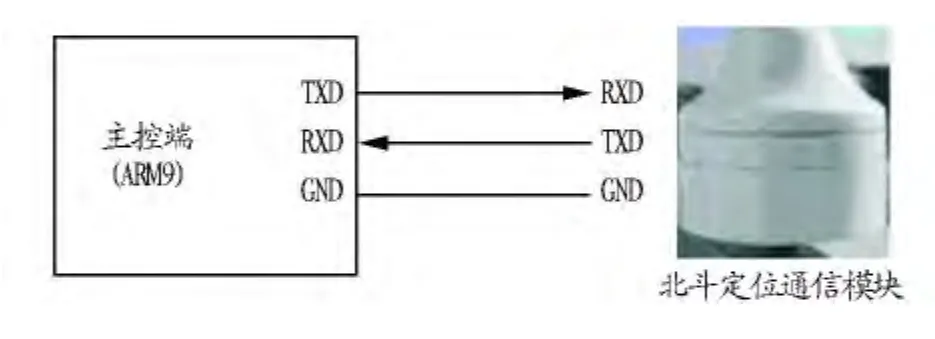
图3 北斗定位通信模块连接示意
(1)中心站定时器计时到时,各分站下发定时采集指令,各分站实时采集水质数据,并将采集到的数据反馈给中心站,中心站选择短信息或北斗将各分站采集的水质数据信息传送到地面数据中心。
(2)中心站接收到地面数据中心实时采集指令后,给各分站下发实时采集指令,分站接收指令后,采集水质数据,并将采集到的数据反馈给中心站,中心站选择短信息或北斗将各分站采集的水质数据信息传送到地面数据中心。
(3)中心站接收到地面数据中心参数修改指令,及时修改采集计时数据或其他采集参数。

图4 采集中心站工作流程
3 数据接收中心
数据接收中心分别处理深水网箱养殖海域的水质数据信息和用户发送的管理指令信息,将采集到的水质数据经解析处理后,存入水质因子数据库,以供分析预警;而用户管理指令分为查询指令和参数修改指令2种,其中查询指令主要为要求环境采集系统实时响应采集、当前参数信息和系统运行状态,参数修改指令主要为要求环境采集系统实时修改系统参数。其执行流程分别如图5和图6所示。

图5 采集数据接收流程

图6 用户指令执行流程

图7 试验数据

图8 温度数据曲线示意
4 试验结果
试验地点位于东海岛养殖基地,实验时间为2个月以上,试验主要进行北斗“短信息”数据误码率、失败率、重传率和水质数据示意。数据中心采集系统如图7所示,试验结果数据如图8、9所示。
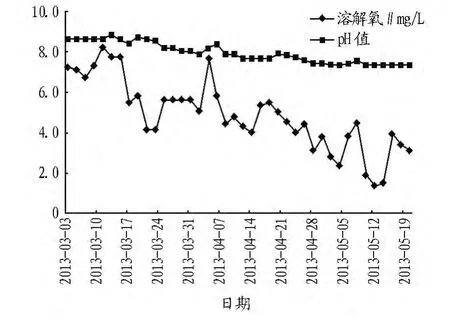
图9 溶解氧、pH值数据曲线示意
整个试验过程中,采集数据误码率约为0.09%,失败重传率约为0.23%。试验结果显示,该系统运行稳定,数据传输正常,通信可靠,设计方案可行。
5 讨论
传统的水质数据采集方式,受制于移动网络覆盖范围,或受制于人力成本,无法实时采集。为此,该研究探讨了利用北斗导航卫星的全方位覆盖和“短信息”报文服务,提出建立一种可靠、快捷的水质数据采集方案,为探索深水网箱养殖投料、药物等可能对环境的影响提供了有效的研究数据,为后续水质环境保护和预警奠定了基础。
[1]张汉华,梁超愉,吴进锋,等.大鹏湾深水网箱养殖区的污损生物研究[J].中国水产科学,2003,10(5):414 -418.
[2]叶廷东,程韬波,周松斌,等.海洋水环境网络化智能监测系统的建模设计研究[J].计算机测量与控制,2014,22(6):1697 -1699.
[3]李金文,杨俊,柳晓砹,等.网箱养殖水质监测预警方案探讨[J].三峡环境与生态,2011,33(6):38
[4]谷春英,姚青山.基于无线传感器的水质监测系统仿真设计[J].计算机仿真,2013,30(1):340 -343.
[5]黄建清,王卫星,姜晟,等.基于无线传感器网络的水产养殖水质监测系统开发与试验[J].农业工程学报,2013,29(4):183 -190.
[6]成方林,张翼飞,刘佳佳.基于“北斗”卫星导航系统的长报文通信协议[J].海洋技术,2008,27(1):26 -29.
[7]彭伟,徐俊臣,杜玉杰,等.基于北斗系统的海洋环境监测数据传输系统设计[J].海洋技术,2009,28(3):13 -15.
[8]于龙洋,王鑫,李署坚.基于北斗短报文的定位数据压缩和可靠传输[J].电子技术应用,2012,38(11):108 -111.
[9]刘传润.北斗卫星导航定位系统的功能原理与前景展望[J].中国水运,2008,8(1):165 -166.
