基于PIC18F458的汽车电动助力转向控制系统设计
2015-12-22苏庆列,王麟珠
基于PIC18F458的汽车电动助力转向控制系统设计
苏庆列,王麟珠
(福建船政交通职业学院,福建 福州350007)
摘要:针对国内汽车电动助力转向系统(EPS)的发展现状和性能要求,基于PIC18F458系列单片机对EPS系统电控单元软硬件进行设计,着重阐述了方向盘扭矩传感器信号采集和带有CAN总线的信息采集模块,以及通过全控桥电机驱动电路实现的PWM脉宽调制永磁无刷直流电机控制模块的工作原理及其实现方法.试验结果表明该电控单元工作正常、性能可靠,满足汽车助力转向的舒适性和安全性要求.
关键词:EPS;电子控制单元;PIC18F458;单片机;CAN总线
中图分类号:TP273文献标志码:A
收稿日期:2015-01-22
基金项目:福建省教育厅A类项目(JA14373);福建省交通厅科技项目(2014Y062).
作者简介:苏庆列(1980-),男,福建德化人,硕士,讲师,研究方向为汽车运用工程、机电一体化.
System Design of Automobile Electric Power Steering
System Based on PIC18F458 Series MCU
SU Qing-lie ,WANG Lin-zhu
(Fujian Chuanzheng Communications College, Fuzhou 350007, China)
Abstract:According to the domestic development status and performance requirements of electric power steering system (EPS), the software and hardware of electronic control unit of EPS is designed based on PIC18F458 Series MCU. The paper focuses on the principle and realization method of the information acquisition module that contains steering wheel torque sensor signals and the information of CAN Bus, and the control module of permanent magnet brushless DC motor which drives by fully controlled bridge circuit. The experimental results show that the electronic control unit works normally and reliably, safely meets the requirements of automotive power steering.
Key words:electric power steering (EPS); ECU; PIC18F458; microcomputer control units (MCU); CAN-BUS

汽车电动助力转向系统(EPS)依靠车载电源,由电动机提供助力,其操纵方便、节约能源、安全环保,符号现代汽车发展需求,已开始运用于中高级以上轿车和商务车上,但国内EPS系统电子控制单元严重依赖国外进口,成本高、维修不方便,而国产产品起步晚,特别在永磁无刷电机控制和车载网络CAN-BUS的信息共享上技术不成熟[1-2].本电控单元以Microchip公司推出的PIC18F458高性能微处理器为核心,设计汽车电动助力转向系统(EPS)电控单元,并通过电气测试和改装试验.
1系统总体设计
EPS系统主要由信息采集模块(包括转矩传感器信号、电机反馈信号和CAN-BUS共享信号)、电子控制单元(ECU)、执行器控制模块(包括电机控制和离合器控制)、减速装置、传动装置等组成,其系统结构(见图1).
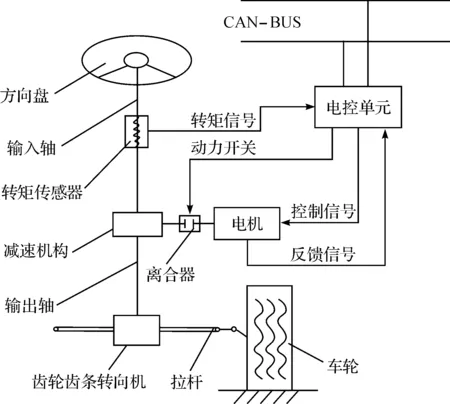
图1 汽车电动助力转向系统结构
EPS系统工作时,通过转矩传感器检测驾驶员作用在方向盘上的操纵方向和力矩,结合CAN总线共享的车速、发动机转速、点火信号、休眠唤醒信号等,运用模糊免疫PID控制策略计算得出理想助力目标PWM占空比,控制电机助力,通过电机动态闭环控制,电机助力转矩与驾驶员的操纵力矩共同克服车轮转向阻力矩,实现车辆智能动态方向助力转向作用,有效保障车辆低速行驶时的操纵性和高速行驶时的安全性.EPS电控单元系统结构拓扑(见图2).

图2 EPS电控系统设计框图
2硬件设计
2.1控制器模块
EPS系统电控单元采用microchip公司的16位微处理器PIC18F458,该芯片除了具有PIC18458系列单片机哈佛架构精简指令结构、计算能力强、性能稳定、可靠性高、超低功耗、成本低廉等有点晚,还引进了一系列串行通信外设,内置CAN控制器,并支持运行、休眠、空闲等多种工作模式,支持车载网络CAN-BUS通讯协议,其增强型CCP模块,在PWM模式下能提供多路经调制输出,这些优异的性能为汽车EPS系统的软硬件设计提供了方便,且工作温度-40~+125℃,能够完全满足汽车使用环境的要求.
2.2信息采集模块
(1)转矩信号采集
EPS系统采用KISTLER公司生产的高精度4503A10L型电位计式扭矩传感器来获取驾驶员加载在方向盘上的力矩和方向,传感器带有主、副双路对称的转矩信号,其中一路转矩信号采集电路原理图(见图3),另一路转矩信号采集电路与之相同.电路中,C7、C8和R12共同组成π型RC滤波电路,滤除转矩信号中的高频部分,稳压管D1起限压保护作用,大电阻R11用来减少输入阻抗.

图3 转矩信号采集电路
(2)CAN总线通信
车载网络在汽车上的应用,提高了车载信息的共享能力、节约了成本,因此EPS系统采用CAN总线共享车速信号、发动机转速信号、点火开关IG信号、故障信息及网络节点休眠唤醒信号等.PIC18F458单片机集成了CAN通信接口,执行Bosch公司的CAN2.0A/B协议[5],可以方便的利用CAN总线与全车网络实现信息共享,软件编程只需对相关寄存器进行相应设置即可,外围接口电路也得以简化,只需要一个Philips公司的PCA82C250作为CAN总线接口芯片,中间用高速光电耦合器6N137隔开,可以很好地实现总线上节点之间的电气隔离,提高系统抗干扰能力和信号传输能力,CAN总线通信接口电路(见图4).
2.3执行器控制模块
(1)无刷直流电机驱动控制
EPS系统选用无刷直流电机作为助力电机,由PIC18F458单片机为Freescale公司开发的高性能无刷直流电机专业集成电路MC33035提供无刷直流电机的转向和PWM信号,MC33035通过霍尔传感器检测电机当前的转子位置,并对其进行译码,转换成具有正确时序的顶部输出信号和底部输出信号给电机控制的驱动器IR2130芯片,IR2130是美国International Rectifier公司生产的一种高电压、高速度的功率MOSFET和IGBT器件的驱动芯片,分别有3个独立的高端和低端输入/输出通道,以此驱动由6个N沟道功率MOSFET管组成的三相六步全控桥电路[5-6].电机驱动电路原理图(见图5).

图4 CAN总线通信接口电路原理图

图5 电机驱动电路原理图
(2)电磁离合器控制
EPS系统电磁离合器由单片机控制4个功率晶体管组成的全桥控制电路来实现动力传递通断控制,提供一种结构简单、安全可靠的汽车EPS电磁离合器控制电路,能够在满足电磁离合器有效、牢固接合的前提下,根据系统助力需要及时、稳定通断电磁离合器,以实现行驶转向助力和确保行车安全的目的.
2.4辅助电路
(1)电源电路:EPS系统电源电路采用Infineon公司汽车专用电源芯片TLE7469,其输入电压范围宽(7~45V),工作温度-40℃~150℃,输出电压精度高,带有外部看门狗电路,以及短路、过温和电池反接保护等功能,保证EPS系统在汽车恶劣的环境下长期稳定工作.
(2)复位电路:EPS系统中复位电路主要完成系统的上电复位功能,PIC18F458的MCLR引脚提供了外部硬件触发器件复位的方法,将MCLR引脚通过一个10k?电阻连接到电源,这样还可以省去产生上电复位延时通常所需的外部RC元件,上电复位事件由POR位(RCON<1>)捕捉,只要发生上电复位,此位的状态就被置为0,它不会因任何其他复位事件发生改变.
3软件设计
针对EPS系统电控单元硬件电路设计,结合汽车EPS系统对电机助力特性的要求,进行相应的软件开发,主要涉及系统初始化、CAN总线通讯、信息采集及处理、PWM占空比计算等,图6为EPS电机控制系统程序流程图.首先,PIC18F单片机唤醒上电并对时钟和各I/O口等进行系统初始化,同时检测EPS节点工作和CAN总线通讯是否正常,如发现异常将存储故障码并显示故障指示灯;接着,检测发动机转速是否达到怠速,怠速及以上时进入主程序;然后,单片机对两路扭矩信号进行AD转换及滤波处理,通过两路信号相减判断电机运转方向,结合CAN总线共享得到车速信息等,综合这些信息进行模糊免疫PID控制算法处理并最终得出控制电机的PWM占空比[8];最后,输出PWM信号、助力方向、离合器闭合信号,驱动助力电机,并返回主程序进入程序再循环.

图6 EPS控制系统程序流程图
4结语
综合以上EPS系统设计,印制了电路板并形成产品,编写相应控制程序,通过电气测试,并在长安福特蒙迪欧汽车上进行替换改装试验,实验结果表明基于PIC18F458单片机的汽车电动助力转向系统工作稳定、成本低廉、安全性能好,在与车载CAN-BUS通信上比较稳定,抗干扰性能好;电机助力能很好满足车辆在不同车速、车况下的行驶助力要求,性能可靠、易于维修.
参考文献:
[1]祝勇俊,朱树先,郭胜辉,等.基于LPC2131的EPS控制系统设计[J].自动化技术与应用,2012,31(5):7-11.
[2]王寿峰.EPS用无刷直流电机控制系统开发研究[D].镇江:江苏大学硕士论文,2010.
[3](法)胡思德.汽车车载网络(VAN/CAN/LIN)技术详解[M].北京:机械工业出版社,2008.
[4]钱学武,马明星,刘永智.电动公交车车用无刷直流电机控制器的设计[J].扬州大学学报,2010,13(1):66-70.
[5]张琛.直流无刷电动机原理及应用[M].北京:机械工业出版社,2006.
[6]苏庆列,王麟珠.模糊免疫PID在电动汽车空调控制系统中的应用[J].湖北理工学院学报,2013,30(5):15-18.
信息启示
水利与环境工程学院前往扶贫结对单位——台州市黄岩区上郑乡接洽扶贫工作
1月22日上午,水利与环境工程学院副院长欧剑、信息工程与艺术设计学院金挺一行人风尘仆仆赶往台州市黄岩区上郑乡,与黄岩区上郑乡乡长林宁乡、党委副书记陈海珍、副乡长吴敏等进行座谈交流,对接扶贫事宜.
上郑乡是我校省级结对帮扶单位,自古就有“两面悬崖石壁山,中间道路和溪滩,还有几亩靠天田,又怕涝来又怕旱”的说法.上郑乡既是是黄岩永宁江的源头,又是长潭水库的水源保护区,为了保护一方的青山绿水,必须开展黄岩溪水生态修复工程.
本次工作对接,明确了下一步扶贫开发工作事项.水利与环境工程学院副院长欧剑一行在上郑乡副乡长吴敏等带领下,沿黄岩溪进行现场考察调研,获取第一手资料,明确了黄岩溪水生态修复工程的主要工作内容.双方交流讨论,规划今后5年黄岩溪水生态修复工程发展计划.
本次对接工作推动了欠发达地区上郑乡水源保护工作的开展,为结对帮扶村的群众做一点实实在在的事情.
摘自浙江水利水电学院网
