高速公路隧道内车辆异常的视频图像识别*
2015-12-21卢士波陈小佳彭苏岳神祖福
卢士波 黎 明 陈小佳 彭苏岳 神祖福
(1.武汉理工大学交通学院 武汉 430063; 2.广东省南粤交通韶赣高速公路管理中心 韶关 512500)
高速公路隧道内车辆异常的视频图像识别*
卢士波1黎明2陈小佳1彭苏岳2神祖福2
(1.武汉理工大学交通学院武汉430063;2.广东省南粤交通韶赣高速公路管理中心韶关512500)
摘要隧道作为高速公路上较为特殊的地段,其安全性受到更多重视。文中从高速公路隧道内行车安全管理的角度出发,分析了隧道内影响行车安全的各种异常状态,指出了其中车辆停驶是影响安全最不利的状态。在此基础上着重开展了针对隧道内停车异常的视频图像识别方法研究。为增强车辆识别能力,提出了将图像纹理特征、几何特征和边缘特征进行组合描述车辆特征的方法。以BP神经网络作为基分类器,通过Adaboost算法得到多个BP网络弱分类器组成的强分类器作为车辆识别模型,并对该识别模型的效果开展了实地实验验证。结果表明,本文所提出的模型对停车异常具有良好的识别效果。
关键词视频图像识别特征融合车辆异常高速公路隧道实验验证
视频图像车辆识别由于其成本低和便于实施的优点,逐渐成为高速公路管理应用的热点。目前车辆识别系统可以基本满足车流统计、超速检测等智能交通系统所关注的基本功能需求。但在高速公路一些特定场所(如隧道),通过视频图像的车辆识别准确率和误报率,以及在利用该技术的应用层面仍存在较多不足,在理论上和技术上还存在很多问题没有解决。
高速公路隧道内由于车辆故障、事故或拥堵引起停车而导致的重大交通事故在国内外有过许多报道。如2014年3月发生在山西晋济高速公路岩后隧道的惨烈事故仍给人留下余悸,事后调查分析事故的引发原因是运煤车辆导致隧道内的堵车,后续车辆进入隧道即发生追尾碰撞,最后由于甲醇泄漏导致悲剧。若能够在第一时间通过前端视频监控自动、准确地获取隧道内情况,并及时发布隧道内信息,告知即将进入隧道的车辆,对避免隧道内追尾事故具有重要的现实意义。我国高速公路隧道内实行全程视频监控,按照交通运输部的要求,每200m间隔布置,则一个2km长隧道内双向最少布置22路视频监控,虽然我国在监控硬件上功能已经逐步变得完善,然而监控中心有限的监视屏,即使对上述一个隧道而言,依靠人工也难以全面观测隧道内的情况,使得监控硬件的效益难以发挥。因此有必要研究开发一种适合隧道内的智能视频技术,能够通过视频监控在第一时间内自动发现高速公路隧道内的行车异常,为防止由于小的异常产生后续重大交通事故提供尽可能长的预警时间,以便采取相应措施。本文即针对高速公路隧道运营安全,分析隧道内常见车辆异常状态,研究提出车辆异常的视频图像识别方法,并对所提出的方法开展技术验证。
1 高速公路隧道内常见异常状态分析
对于高速公路而言,隧道内异常主要是针对车辆而言的。经过对高速公路隧道公路运营管理部门的了解,车辆异常大体包括如下几个方面:①车辆故障引起的异常,表现为车辆熄火、车辆自燃等;②驾驶员人为因素引起的异常,包括车辆驾驶员身体不适、车辆落物后停车拾物、违规停车或减速行车、逆行或其他怪异驾驶行为等;③交通事故引起的异常,常见的有超车碰擦、车辆追尾等;④交通量或天气引起的异常,如车辆拥堵、局部大雾导致的行车缓慢等;⑤其他因素引起的异常,如车辆落物或隧道部分坍塌形成路障等。从保障隧道内行车安全的角度出发,上述异常情况可进一步划分为严重威胁行车安全和对行车安全有潜在威胁2类,见表1。
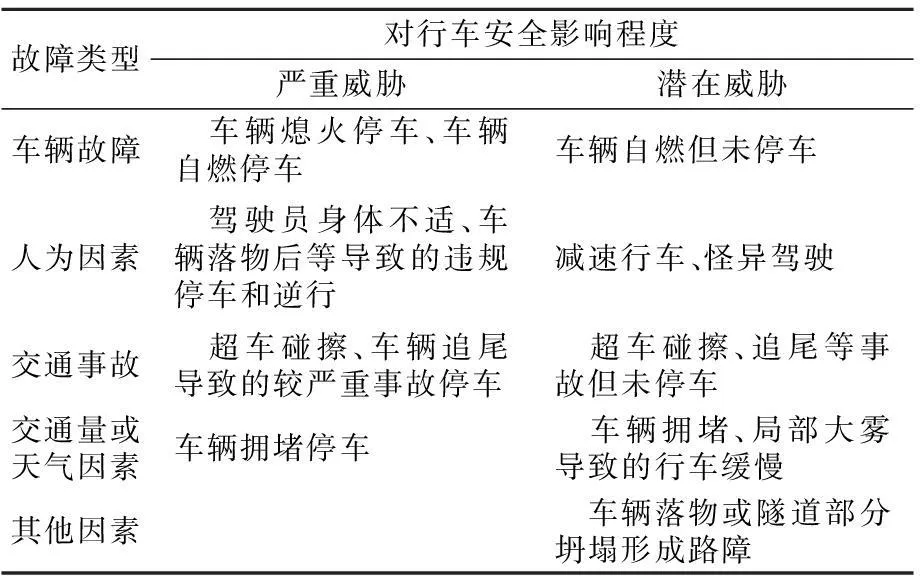
表1 隧道内行车安全影响分析
由表1可见,对高速公路隧道内行车安全构成严重威胁的主要来自各种因素导致的停车,停车占据了隧道内车道,并且由于隧道内光线暗,有效识别距离短,构成了隧道内行车安全管理中最重要的内容。本研究基于视频图像出发,以隧道内停车作为视频图像识别作为主要的研究对象,图像识别的基本思路首先是提取车辆图像,并判断车辆图像的运动状态,若发现车辆视频帧图像由运动状态转入静止状态后,即发出异常停车信号。
2 隧道内车辆图像识别方法
高速公路隧道背景条件下一方面光照不足以及光照变化强烈等因素造成车辆识别困难;另一方面车辆形状、大小、色彩以及摄像头角度等各种不同因素也使得研发出通用的车辆识别系统仍然是一个比较困难的问题。从车辆跟踪的角度来研究车辆识别与分类问题是过去一段时间国内外研究较多的途径[1-2],这类算法比较成熟,但不能较好地区分其他物体;此外还有车辆类型识别方面的研究,这类方法侧重于车辆类型识别,在复杂背景下效果不理想;而在复杂背景下主要集中在夜间车辆识别,这些方法主要利用汽车尾灯的识别来检测车辆。文献[3]利用图像的主分量分析方法进行特征提取,然后采用支持向量机(SVM)分类器来进行车辆检测。近若干年来图像识别问题偏向对象的特征提取,图像特征包括视觉特征、统计特征、变换域特征等。如采用基于Haar_like矩形特征的视频车辆检测算法,该方法首先提取Haar_like矩形特征,然后利用改进的Adaboost方法进行集成[4]。对于车辆识别问题,采用单类的特征,存在特征描述能力不足,识别性能不理想的问题。因此需要研究开发具有普适能力的车辆识别技术。
2.1车辆特征提取
根据所针对的问题,图像识别首先需要解决特征提取问题,通常图像特征包括视觉特征、统计特征、变换域特征等多方面[5]。对于车辆识别而言,采用单一的特征,虽然计算量小,但存在特征描述能力不足的问题,进而导致识别准确率不高。因此,本文提出将描述纹理特征的灰度共生矩、描述几何特征的Hu不变矩统计特征和描述边缘特征的小波能量特征[6-7]3类特征进行组合,增强识别模型的描述能力。
(1) 灰度共生距是提取图像纹理特征的一种常用的方法,基本思想是基于纹理中某一灰度级结构重复出现的情况;这个结构在粗糙纹理中随距离的增长变化缓慢,而在精细纹理中变化较快。在此选择了二阶矩(能量)、惯性矩(对比度)、逆差矩和熵等4个用于纹理分析的灰度共生矩常用特征参数,以便于从多方面反映图像纹理粗糙程度和均匀程度。
(2)Hu不变矩是一种描述图像形状的全局特征,具有旋转、平移、和尺度不变性的几何特征。对于车辆而言,其图像的几何特征具有某些不变特征。Hu不变矩正好包含了图像中诸如位置、方向、大小,以及形状等几何特征信息。Hu不变矩包含7个变量,它们由二阶和三阶中心矩分别构成了对图像旋转、平移、缩放都不敏感的矩特征向量,通常应用于二值化图像的特征识别。Hu不变矩从统计的角度对识别目标的形状有很好地描述效果,但如果车辆区域的纹理比较复杂会造成识别目标整体形状描述能力下降,因此,在进行目标识别时需要结合前述纹理特征来增强图像特征集的描述能力,进而提高识别能力。
(3) 在出现车辆的视频图像中,车辆区域与对应背景相比,其边缘和细节信息增加,这些边缘和细节信息与图像中的高频信息相对应。从小波能量的角度来看,车辆会使得图像中高频能量增加。本文采用视频图像兴趣区域框和相应背景区域经过db2小波变换后的高、低频能量来描述车辆图像特征。考虑到频谱能量的相对性,本文以低频能量比值和高频能量比值2个特征作为图像的小波能量特征,用于描述车辆图像的边缘特征。
2.2车辆识别分类识别器的构建
以上述4个纹理特征、7个Hu矩几何特征和2个小波能量为代表的边缘特征,共13个特征作为BP神经网络拓扑结构的输入层,并构建13个隐层节点和1个输出节点。虽然BP神经网络具有信息处理的巨量并行、分布存储、自组织、自适应等特性,且具有很强的容错能力,但单纯基于神经网络得到的模型识别率并不高。故本文以上述BP神经网络作为基分类器,再利用Adaboost进行集成以提高识别能力,即把BP网络作为弱分类器,反复训练BP网络预测能力,通过Adaboost算法得到多个BP网络弱分类器组成的强分类器作为车辆识别模型,具体算法步骤另文介绍。
车辆识别后,根据图像中车辆的运动状态,可以判断是否发生车辆由运动状态进入静止状态,综合一般交通事件监测响应时间,设定出现停车持续时间6s,判定为车辆处于停车状态。
3 隧道内车辆停车识别的视频实验验证
在上述模型基础上,本文研究开发了基于德州DM64系列嵌入式智能图像分析模块。为了验证上述模型对隧道内车辆停车的识别效果,本文开展了实地实验验证工作。选取了武汉理工大学地下通道作为实验场地,该地下通道为双向2车道,通道内照度条件一般,照明灯为间隔开启状态,图1为实验现场实景。视频图像通过安装于隧道顶面的摄像机获取,采用彩色转黑白定焦摄像机(sf-3s186x),焦距8mm,测试过程开启红外。采用了2台车辆进行实验,设定了多种行车状态实验方案(见表2),每种行车工况状态模拟3次,检测距离设计为25,50,75m和100m3种。行车速度采取正常行驶和缓慢行驶2种状态,按照30~50km/h为正常行驶,低于5km/h为缓慢行驶。实验评判标准为:按照车辆完全停止6s内发出报警信号为识别正确,缓慢行驶不停车状态下发出报警则为误报,行车状态下落物未识别为漏报。车辆行驶状态视频图像识别效果见表2。
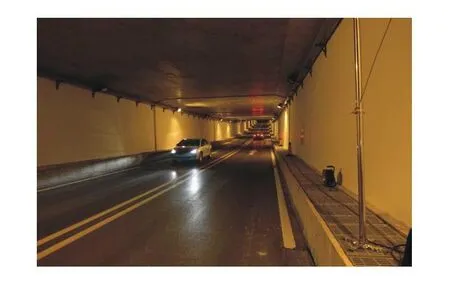
图1 实验现场实景

状态测试工况车辆位置(距摄像头距离/m)255075100识别正确率/%正常行驶正确次数单车车道内停车3333100单车跨车道停车3333100双车并行同时停车3333100双车并行单车停车3333100双车串行前后同时停车3333100双车串行后车停车3333100缓慢行驶误报次数单车不停车0000100一车正常行驶一车缓慢行驶000192其他漏报次数行车中落物001367
实验结果表明,本文提出的视频图像识别模型对隧道内由行驶状态转入停止状态的车辆具有非常高的正确率,表明本文方法对隧道内车辆停车状态的识别是有效的。本次实验采用了60×40×7cm纸箱模拟行驶中落物,随着距离增加,识别率降低,与落物大小在视频图像中所占像素有直接关系,此外物体的几何形状、物品的材质等与车辆的特征还有区别,相应识别模型还有待进一步完善。
4 结论
本文从高速公路隧道内行车安全管理的角度出发,分析了隧道内影响行车安全的各种异常状态,结合现有隧道内视频监控的条件,开展了基于视频图像的隧道内行车异常识别方法研究,提出并建立了隧道内停车图像识别的方法和模型,并对该识别模型的效果开展了实地实验验证。结果表明,本文所采取的方法和模型对停车异常具有良好的识别效果,可为高速公路的安全运营管理提供新的手段。
参考文献
[1]MEIX,LINGHB.Robustvisualtrackingandvehicleclassificationviasparserepresentation[J].IEEETransactiononPatternAnalysisandMachineIntelligence.2011,33(11):2259-2272.
[2]SIVARAMANS,TRIVEDIMM.Ageneralactive-learningframeworkforon-roadvehiclerecognitionandtracking[J].IEEETransactiononIntelligentTransportationSystems.2010,11(2):267-276.
[3]ZHOUJ,GAODS,ZHANGD.Movingvehicledetectionforautomatictrafficmonitoring[J].IEEETransactiononVehicularTechnology.2007,56(1):51-59.
[4]文学志,方巍,郑钰辉.一种基于类Haar特征和改进AdaBoost分类器的车辆识别算法[J].电子学报,2011,39(5):1121-1126.
[5]李开明,张群.地面车辆目标识别研究综述[J].电子学报,2014,42(3):538-546.
[6]姚敏.数字图像处理[M].北京:机械工业出版社,2006.
[7]GONZALEZRC,WOODSRE数字图像处理[M].阮秋琦,宇智,译.北京:电子工业出版社,2007.
收稿日期:2015-06-19
DOI10.3963/j.issn.1671-7570.2015.04.044
*广东省交通运输厅科技项目(科技-2013-02-083)资助