上肢残肢肌电信号交互的实现
2015-12-20徐国庆吴云韬
徐国庆,吴云韬
(武汉工程大学 计算机科学与工程学院 智能机器人湖北省重点实验室,湖北 武汉430205)
0 引 言
上肢截肢患者的康复训练是患者术后康复的重要环节。文献 [1-3]等对肌电信号的多模态识别进行研究,通过提取腕肌电信号峰度,对神经性疾病以及肌肉劳损度预测进行研究。随着模式识别技术的发展,将模式识别的算法应用于多通道表面肌电 (sEMG)信号处理成为新型肌电假手的主要处理方法,针对上肢残疾或者行动不便的人群,通过肌电信号处理,使患者实现以残肢肌电信号进行鲁棒人机交互[4-7]。在临床康复过程中,针对肌电信号识别、对sEMG 信号进行滤波去噪等研究,提出了一系列有效的方法[8-10],包括使用改进的自适应共振理论神经网络实现基于2通道的sEMG 的6类手指运动识别、使用线性判别分析 (LDA)、使用高斯混合模型对sEMG 信号分类识别,分别在信号采集、活动段检测、特征提取、动作识别方面进行研究,构建了基于sEMG 的实时手势识别系统。
在肌电信号中包含一定成分的高频噪声,使用小波变换可以较为有效地对sEMG 信号特征降噪处理,结合空间电极阵列检测并运用空间滤波来获取高质量的sEMG 信号。肌电信号受到残肢劳损影响,使用sEMG 进行长时间交互会使降低系统自适应能力。肌肉的长期重复运动也会降低系统的有效性。因此如何有效提高上肢残肢康复训练过程的有效性,增强残肢肌电信号的精度以及可用性,对于提升患者对肌电信号的控制能力具有重要的意义。
本文针对基于残肢肌电信号实时动作识别中的特征提取方法进行研究,提出了结合短时肌电信号特征的动作识别算法,并构建了基于残肢肌电信号的康复训练系统。相比于已有的算法,该算法在时域进行短时处理,在效率和动作识别精度上有较大提高。实验结果表明,该算法是识别上肢残肢表面肌电信号动作的有效方法。
1 肌电信号的多分辨分析
表面肌电信号是一维时间序列,对于L2(R)中的函数可以表示为近似函数逼近的极限,近似函数为原函数在不同分辨率子空间上的投影。空间Vj上函数分解公式可以表示为

即通过引入正交补空间Vj-1和Wj-1,将Vj上的函数分解为Vj-1上的尺度分量和小波空间Wj-1上的小波分量,其中

在上式中令j→∞得到函数的完全正交分解

利用多尺度分解,将原信号分解为正交空间的低频分量和高频分量。对于噪声分量,其大部分成分位于高频空间,通过对分解后的信号的高频部分进行滤波处理,可以将原信号中的大部分噪声信号去除。
(1)|H(ω)|2+|H(ω+π)|2=1;
(2)H(0)=1;
对肌电信号进行多分辨分解,在重构信号中噪声去除明显,但是信号的能量得以保留,动作部分的信号幅值能量特征可以明显增强,并且能量损耗小 (其峰值基本完全保留),使用自动阈值使滤波后的信号的总体方差更小,信号均匀分布于0值附近。
2 肌电信号短时特征提取
表面肌电信号中的动作段和无动作段的峰值区别明显,但无动作段的高频部分有比较强的噪声,因此在处理的初始阶段,应对这些噪声信号进行滤波处理。
从肌电信号的特征来看,其动作的触发具有偶然性、非周期性、非固定时长等特点,可以采用基于短时特征的分析方法,使用短时过零率、短时能量、短时平均幅度等统计方法,提取信号的短时数字特征。
肌电信号 {x(n)}的短时能量定义为
其中,N 是时间窗口,如果直接对时间窗口进行能量累加,在瞬时尖峰噪声处会引入较大的误差,因此实际中,选择短时平均能量,即对短时能量窗口进行平均

考虑到平方计算的效率,可以使用肌电信号的短时平均幅度代替平均能量计算

信号 {x(n)}的短时平均过零率为

其中,sgn为符号函数

肌电信号在时间域为一维数字信号,为进行短时处理,将肌电信号进行时间轴分帧。即设置每帧包含m 个采样点,将信号分为k帧,在每帧序列上分别计算信号的短时能量特征sij和短时过零率特征qij,特征以布尔值表示

式中:i,j——帧序号和帧内采样点序号。使用sij和qij构成短时能量和过零率矩阵
在实际算法中,考虑到单一特征在信号处理过程中会引入误判,因此,可以将两类特征进行组合,得到复合判别特征

复合特征Edge可以较好地表述肌电信号实际动作段/非动作段的端点跳变特征,结合复合特征矩阵,对动作信号进行端点检测。
根据肌电信号动作段、非动作段过渡的状态,引入3种状态参数,0表示静止无动作段,1表示肌电信号从无动作段到动作段的过渡段;2 表示肌电信号从有动作段到无动作段的过渡段。
由于动作段、非动作段过渡段会出现瞬时噪声跳变,为消除尖峰噪声引起的误判,将过渡状态转换判断进行延迟检测处理,即当出现动作跳变时,继续对后续若干帧进行连续动作判断,如果后续动作持续一段时间为相同的判断结果,则可以确认过渡段,从而消除误判的过渡段。
砖子乍进门,见纤掌挥来,明知敌不过刀马旦的拳脚功夫,也要拼力反抗、击退气势汹汹的强敌的,然而气吐如兰的动口不动手,将他软化在石榴裙下了。赵仙童拥着他坐上沙发,转身沏杯龙井茶,又削了一只大苹果,剖成片放进碟子里,捏出一片撒着娇要喂他。砖子涌起潮水般的感动,晚上遭受诗友们不知情的污辱,白天挨的莫名其妙耳光,全都在一片苹果、一杯清茶中和解了。尽管这是他多年夫妻生活中,从未经历过的大起大落。
3 尺侧腕伸屈肌电信号动作识别
3.1 识别分类器设计
支持向量机 (SVM)针对线性可分的分类面问题,实现对两类样本的区分,并使分类面距离两类样本的间隔最大,从而使分类的期望风险最小,并可推广到高维空间。在肌电信号中包含两类特征,可使用SVM 实现鲁棒区分。对于线性可分的样本集(xi,yi),i=1,2,…,n,xi∈Rd,yi∈{-1,+1}是两类类别标志。在d维空间,线性判别函数为:f(x)=〈w,x〉+b,对应的两类分类面为:〈w,x〉+b=0。
SVM 通过归一化处理,使两类样本中位于支撑超平面上的样本满足=1,并且使两类样本的支撑超平面的间隔最大为:2/w ,对于正确分类的样本,有:yi[〈w,xi〉+b]≥1,i=1,…,l。对于线性可分的样本集,尽管在起始阶段存在一段干扰噪声,使其短时能量值较大,但是由于该段噪声内的短时过零率较低,在过零率曲线上可以直接将其去除,从而准确识别动作段。
3.2 短时特征构造
在两通道信号分割端点限定的动作段内,分别计算两通道信号的平均能量,短时平均能量很好地刻画了动作段内的两个通道采集数据的短时特征。将两通道的肌电信号的短时平均能量构成特征向量v,v ={},分别提取m 组伸腕动作、屈腕动作的动作段特征矢量构成正、负 训 练 样 本:Vpos= {v1,v2,…,vm},Vneg= {,…,}。
各样本对应的类别标签为:Lpos={+1,…,+1},Lneg={-1,…,-1}。
使用短时特征获取的两类动作的训练样本,可以较好地消除瞬时噪声的影响,特征提取简单有效。
4 实验和讨论
针对两路信号进行尺侧腕伸屈动作识别,对不同测试者的两类动作数据,每名受试者的伸腕、屈腕数据分别连续采集。在采集时通过测试,选择肌电信号相对较强的尺侧腕伸屈肌,交替记录两个通道的电极的采集数据,受试者每隔2s伸腕一次,每次伸腕的动作时间为1.5s左右。
对原始信号进行多尺度滤波、重构,并在重构后的信号中进行动作段分割。由于在屈腕、伸腕动作中两通道的信号的动作段是交替的,因此在处理时根据动作与通道的关系,选择有动作的通道作为动作段分割的通道,另外通道采用相同的端点进行分割。将分割后的动作段信号输入分类器实现动作识别。
图1是自适应的阈值去噪方法,对尺侧腕伸屈肌起始的3个动作段信号去噪的对比的结果,从上到下依次为:原始信号、强制去噪后的信号、默认阈值去噪、手动阈值去噪、自动阈值去噪的结果。

图1 尺侧腕伸屈肌信号去噪算法对比
从图1可以看出,采用强制消噪,直接将小波分解的高频段信号置零,则重构的信号中动作信号的特征基本消失,而在高频段的动作区保留有较明显的信号特征,直接去除高频部分会导致较大的信号失真。使用默认阈值去噪,重构后的信号总体能量损耗较大,而使用手动软阈值和自动软阈值方法去噪,由于考虑到细节信号中所含有的动作特征,将其中的动作部分的较大能量特征予以保留,为短时特征提取提供较为丰富的计算样本。
图2是使用本文得短时特征识别算法信号动作段分割结果。结合肌电信号短时实际特性,分别对尺侧腕伸肌的3个动作段和尺侧腕屈肌的4个动作段计算短时能量和短时过零率,依据短时特征进行动作段分割提取。通过肌电信号的高频滤波处理,能够在原始信号上滤除大部分的高频噪声,但是动作信号段的低频特征得以完整保留。在上肢残肢两侧肌肉运动过程中,动作段与非动作段的信号具有较为显著的区别。从图中可以看出使用本文的噪声自适应去除方法,能够完整地保留动作段的信号特征,结合提出的端点分割算法,可以较为准确地区分出动作的起止点。为动作特征提取提供较为精确的分割结果。

图2 肌电信号动作段检测分割结果
为验证SVM 算法以及短时特征的分类效率,分别采用SVM、神经网络 (ANN)进行训练,并对两种分类算法进行对比。其中SVM 分类器分别使用线性核函数、多项式核函数、RBF核函数进行训练,并对测试集进行识别测试。
实验分别采集了4个人的伸腕、屈腕动作,采集点为尺侧腕屈肌和尺侧腕伸肌,训练数据集为16组共320个动作段,测试集为伸腕5组,屈腕7组,使用短时算法提取两类样本的特征。
表1 是使用短时平均能量对12 组测试数据 (伸腕5组、屈腕7组)共966个动作段,分别使用SVM 及神经网络的正确识别的动作数及识别率。N 为输入样本数,M 为正确识别的样本数,从结果可以看出对屈腕组数据SVM 和ANN 分类的区别较大。总体上SVM 法要优于ANN 算法。
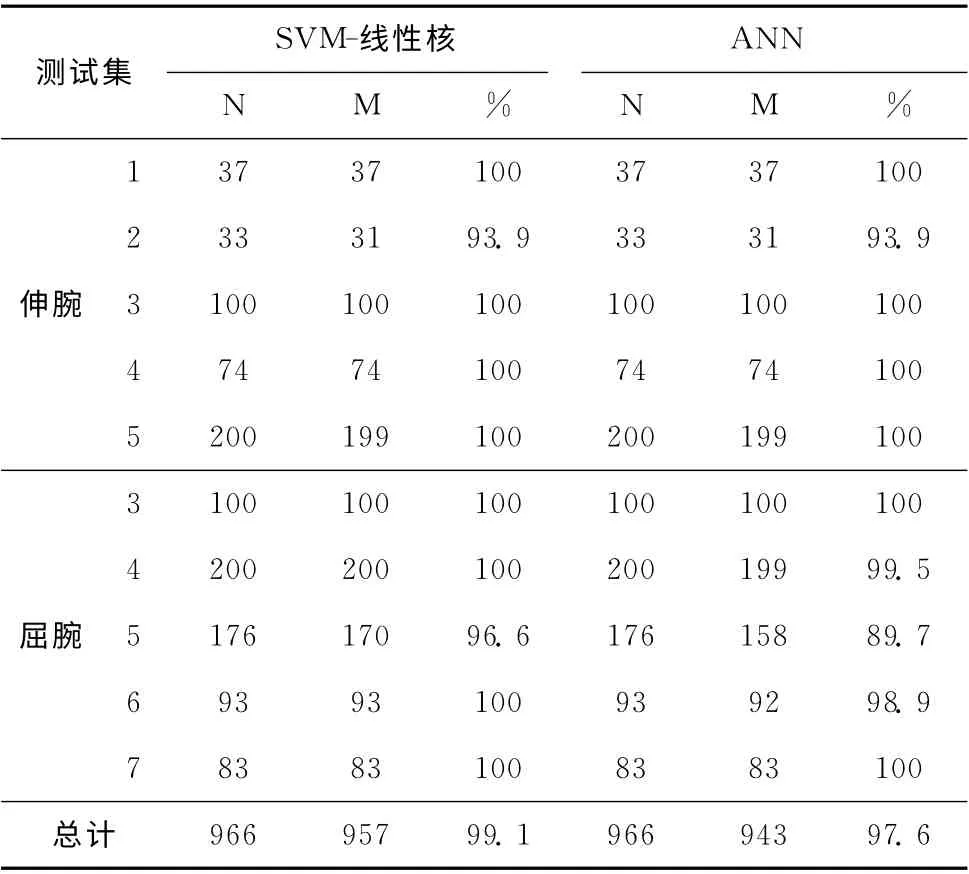
表1 动作分类测试结果
图3是对一组屈腕动作分类识别结果 (左右图分别为ANN、SVM 方法),图中实心点标记为尺侧腕屈肌动作特征,十字标记为尺侧腕伸肌动作特征,圆圈对应于测试集屈腕5组中的176个尺侧腕屈肌动作特征样本,从对比图上可以看出,SVM 根据结构风险最小化原则,具有强泛化性能,其分类性能要明显优于神经网络。SVM 误分类的样本数为6,并且基本上在分类面的附近,而神经网络的误分类样本数为18,且大部分样本点距离分类面的距离较远。

图3 ANN 和SVM 测试集识别结果
从图3可看出,使用线性核的SVM 和神经网络对两类动作的分类器性能有明显的差异,SVM 的分类特性充分体现,其分类面不仅使两类样本的分类误差最小,且使分类面距两类样本的距离最远,兼顾了训练误差和推广能力。
图4为使用本文提出的基于短时能量的动作识别算法对握拳、张拳动作的识别结果以及使用肌电信号实时驱动三维手骨格模型动作的效果。从实验交互的过程来看,使用短时信号特征可以在较短的时间内提取有效特征,算法计算过程简单有效,在识别过程中使用线性SVM 算法,可以将两类多进行较为精确的区分,并基本上肢动作过程中,可以较为鲁棒地实现两类动作检测。由于使用短时能量直接在信号域进行处理,算法实现效率和动作识别的准确度高,可以应用于上肢残肢肌电信号交互训练。
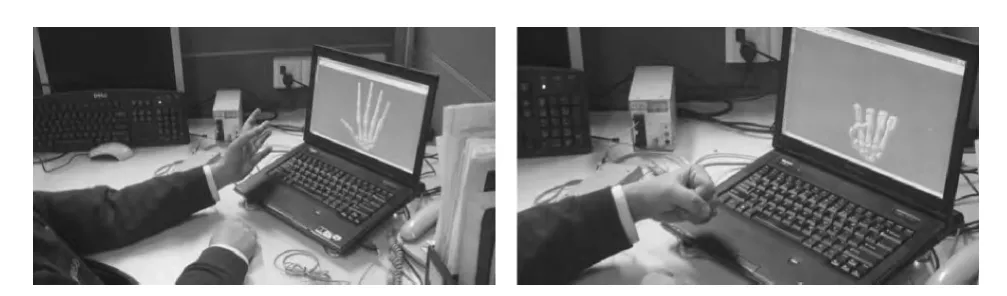
图4 肌电信号驱动的手骨骼模型交互
对比神经网络,使用SVM 分类器,对线性可分的两类尺侧腕伸屈肌动作,平均识别率在99%以上。考虑到线性核函数的SVM 对两类在识别率上已经可以满足实际需要,因此确定使用此分类器作为尺侧腕伸屈肌两类动作的识别算法。
5 结束语
肌电信号交互是上肢残障患者的有效的功能替代方式,对肌电信号动作的鲁棒识别和实时处理的效率直接影响到交互过程的效率。通过引入短时信号特征提取方法,并在计算中使用绝对值平均代替短时平均能量,进一步降低计算复杂度,使特征提取在计算效率上有较大提升。对于肌电信号在测试集中的错误识别的样本,其原因主要是由于两类动作的肌肉收缩力度不足导致信号的动作段与非动作段的区分度不足,可以从以下方面加以改进:一是选择两侧肌肉收缩力较大的采集点,并在皮肤表面进行清洁处理以增强导电性能;二是在使用时要求患者提高肌肉动作力度,增强两类动作的动作段对应两通道信号短时特征的对比。考虑到动作采集效果对特征提取及识别的影响,在采集中可以通过测试选择肌电动作区分度较大的肌群进行采集。
[1]Fong D T,Yam K,Chu V W.Upper limb muscle fatigue during prolonged Boccia games with underarm throwing technique[J].Sports Biomechanics,2012,11 (4):441-451.
[2]Bonfiglioli R,Botter A,Calabrese M.Surface electromyography features in manual workers affected by carpal tunnel syndrome[J].Muscle and Nerve,2012,4 (6):873-882.
[3]Ahamed N U,Sundaraj K,Poo T S.Design and development of an automated,portable and handheld tablet personal computer-based data acquisition system for monitoring electromyography signals during rehabilitation [J].Proceedings of the Institution of Mechanical Engineers,2013,227 (3):262-274.
[4]Qin Zhang,Mitsuhiro Hayashibe,Philippe Fraisse.FES-induced torque prediction with evoked EMG sensing for muscle fatigue tracking [J].IEEE/ASME Transactions on Mechatronics,2011,16 (5):816-826.
[5]Sakrapee Paisitkriang Krai,Shen Chunhua,Zhang Jian.Incremental training of a detector using online sparse Eigen decomposition [J].IEEE Transaction on Image Processing,2011,20 (1):213-225.
[6]Ali Asadi Nikooyan,Amir Abbas Zadpoor.Effects of muscle fatigue on the ground reaction force and soft-tissue vibrations during running:A model study [J].IEEE Transactions on Biomedical Engineering,2012,59 (3):797-802.
[7]Lotte F,Guan C.Regularizing common spatial patterns to improve BCI designs:Unified theory and new algorithms [J].IEEE Trans Biomed Eng,2011,58 (2):355-362.
[8]Peter O,Fazekas G,Zsiga K.Robot-mediated upper limb physiotherapy:Review and recommendations for future clinical trials[J].International Journal of Rehabilitation Research,2011,34 (3):196-202.
[9]Tscharner VV,Eskofier B,Federolf P.Removal of the electrocardiogram signal from surface EMG recordings using nonlinearly scaled wavelets[J].Journal of Electrocardiogram and Kinesiology,2011,21 (4):683-688.
[10]Zidelmal Z,Amirou A,Adnane M.QRS detection based on wavelet coefficients[J].Computer Methods and Programs in Biomedicine,2012,107 (3):490-496.
