一类食植生态系统的定性研究
2015-12-20王继成
王继成
(绥化学院信息工程学院 黑龙江绥化 152061)
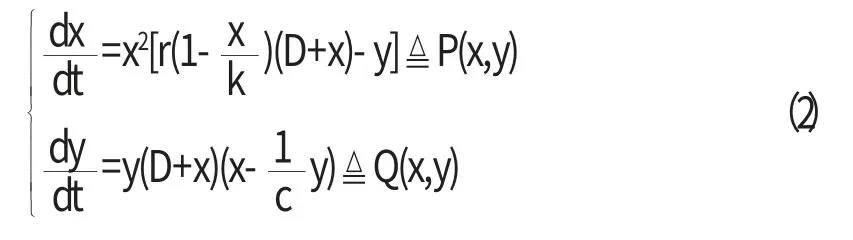
Caughley[1](1976)提出,如果食植性昆虫在进行取食过程中,彼此之间存在着相互干扰现象时,其数学模型为

其中x为寄主植物种群数量,y为植食性昆虫种群数量;D为在寄主植物低密度下与取食效应的反比,k为未被昆虫取食的最大的植物密度,r1,r2分别为植物与植食性昆虫的内禀增长率,c1为每头植食性昆虫的最大取食率,c2为维持植食性昆虫在平衡时所需植物数量的比例常数,各参数均为正数。
R={(x,y)|x>0,y叟0},R+={(x,y)|x>0,y>0}
一、平衡点的分析
显见系统(2)除O(0,0)外,还有平衡点A(k,0),但O(0,0)不是系统(1)的奇点,令P(x,y)=0,Q(x,y)=0得方程组


因△=[ck-r(k-D)]2+△r2kD>0,所以方程(3)有两相异实根,其
于是得到系统(2)的唯一正平衡点E(x*,y*),其中y*=cx*

在点A(k,0)的线性近似方程的系数行列式

因此,A(k,0)是鞍点。
对于平衡点E(x*,y*),有

二、全局稳定性

因此,平衡点E(x*,y*)是非鞍点,

引理2 当r(k+D)2叟2ck(k-D)时,平衡点E*(x*,y*)是稳定焦结点。

引理3[3]若k-r(k-D)叟0,则E(x*,y*)是稳定焦结点.
证 当k-r(k-D)叟0时,有h(x)>0,进而h(x*)>0,故Tr(E)>0
引理4 设k-r(k-D)<0,则
(1)如果[k-r(k-D)]2<8rkD,那么E(x*,y*)是稳定焦结点;
(2)如果[k-r(k-D)]2=8rkD,那么E(x*,y*)或者是稳定焦结点,或者是中心;
(3)如果[k-r(k-D)]2>8rkD,那么存在正数α 和β(α<β)易知β<
(i)当x*<α 或x*>β 时,E(x*,y*)是稳定焦结点;(ii)当α<x*<β 时,E(x*,y*)是不稳定焦结点;(iii)当α=x*或β=x*时,E(x*,y*)是中心。
证 依据条件和(5)式易知。
定理1 如果r(k+D)2>2ck(k-D),那么正平衡点E(x*,y*)全局渐近稳定。
证 由条件及引理2知E(x*,y*)为稳定焦结点。
作Lipunov函数

显然V(x,y)在E*(x*,y*)的邻域内正交,且V(x*,y*)=0
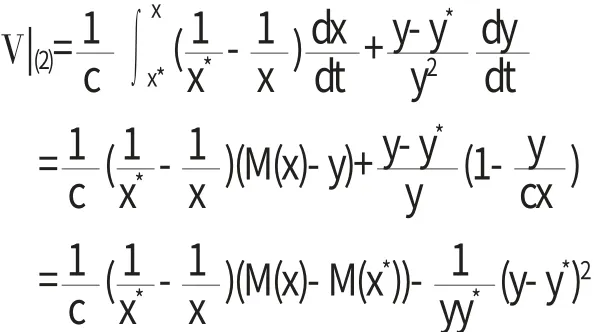

图1
由r(k+D)2>2ck(k-D),知x*>,而在x*的邻域内M(x)严格减少,如图1所示,所以)(M(x)-M(x*))<0,因此,当(x,y)≠(x*,y*),V<0,据Lasalle定理知E(x*,y*)为全局渐近稳定的。
三、极限环的存在性
定理2[4]在x>内,系统(2)不存在极限环
证 取Dullac函数B(x,y)=x-2y-1,则当x>时有

定理3 设k-r(k-D)<0,[k-r(k-D)]2>8rkD,如果α<x*<β,那么系统(2)绕E*(x*,y*)至少存在一个稳定的极限环。
证 据定理的条件及引理4,知E为不稳定焦结点。现在构造E的外境界线如图2所示。

图2
对于直线LAB:x-k=0,有

因此,LAB是无切直线且系统(2)的轨线通过LAB的方向是从右向左。

所以LBC也是无切直线且系统(2)的轨线通过LBC的方向是从上向下。
我们对系统(2),即

作平移变换X=x-x*,Y=y-y*,则(2)变为
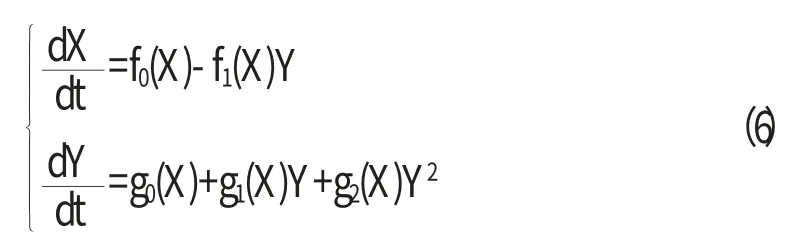
其中f0(X)=(X+x*)2[M(X+x*)-cx*],f1(X)=(X+x*)2

令X=X,ξ=f0(X)-f1(X)Y,则(3)变为





我们只须在-x*<x<k-x*内讨论。



图3
2°显然V是严格增加的。

由引理4知,当α<x*<β 时,准1(0)<0,所以f(0)<0。
证 见参考文献[2]的定理7.4及参考文献[3]的注释,可知定理成立。
[1]丁岩钦.昆虫种群数学生态学原理与应用[M].北京:科学出版社,1980.
[2]张芷芬.微分方程定性理论[M].北京:科学出版社,2003.
[3]李家成.一个植物——食植者系统模型的定性分析[J].华中师范大学学报,1991(1).
[4]丁同仁,李承治.常微分方程教程[M].北京:高等教育出版社,2002.
