水位自动监测系统的研究与设计
2015-12-20郝润科
黄 伟,郝润科,尹 刚,奕 健
(上海理工大学光电信息与计算机工程学院,上海 200093)
由于水电站兼具防洪、发电、航运等功能,根据不同的功能需求,对水电站蓄水容量的要求也不同,因此水电站的水位数据成为水电站运行时必须监测的一个重要数据。为保证水电站安全运行,发挥水电站最大的经济效益,建立一套完善的水电站自动水位监测系统显得尤为重要[1-2]。
1 系统结构
水电站水位自动检测系统需要满足长时间无人职守的功能,能够及时采集水位数据,并发送至远程终端。为保证采集精度,本系统采用一主多从的形式,主机与从机在硬件上的区别是多了个第二代移动通信技术(Global System for Mobile Communications,GSM)模块。数据采集终端将采集到的水位信息通过无线通信模块发送至数据中转站,再通过GSM模块发送至远程终端,系统结构如图1所示。

图1 系统结构示意图
系统指标如下:(1)实现水位数据的采集。(2)将水位数据传送至远程终端。(3)测量高度2~30 m,跨度100 m以内。
2 系统设计
2.1 水位传感器选择及其测距原理
设计选用超声波传感器作为系统的水位传感器[3-4]。通过超声波发射装置向目标液面发射一定频率的超声波,被水面反射回来的反射波被接收装置探测接收,由于超声波的传播速度已知,因此通过计量超声波从发射开始到接收到回波信号的时间,即可求得液面距离传感器安装位置的高度。测量示意图如图2所示。
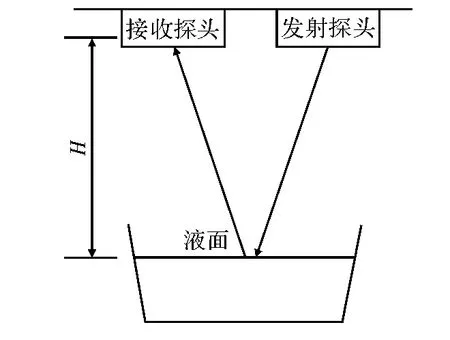
图2 测量示意图
由图可知,H=V×T/2。其中,H表示超声波探头距离液面的距离,为待求量;V表示超声波的传播速度,为已知量;T表示超声波的传播时间,需在工作时测得。由于两探头之间的安装距离相对于H很小,因此可以将超声波的传播路径近似认为是与液面垂直的直线距离。
2.2 MCU芯片的选择
由于水电站水位自动监测系统的设计目的是实现水电站水位的无人监守,因此设计在选取MCU和具体元器件时对功耗问题要进行特殊考虑。鉴于此,选用意法半导体公司的STM32F103作为本系统的MCU,其具有多种功耗管理模式,可以满足不同工作状态和环境下的需求。
2.3 无线通信模块
由于水位采集终端与数据中转站之间的距离相隔比较远,传统的有线传输显得比较复杂甚至难以实现。为此,采用无线数据通信手段,具体选用nRF24L01无线通信模块。nRF24L01是水位数据采集终端和数据中转站之间的数据通信工具,使各水位数据采集终端将采集的数据发送至数据中转站。
nRF24L01是一款融合了增强型ShockBurst技术的新型单片射频收发器件,工作于2.4~2.5 GHz ISM频段,仅通过程序即可配置其输出功率和通信频道。nRF24L01具有优秀的功耗管理模式,而且在以-6 dBm的功率发射时工作电流只有9 mA,接收时工作电流12.3 mA,除此之外还有掉电模式、空闲模式等多种低功耗模式,使节能设计更加方便。nRF24L01与MCU通过SPI接口连接,其电路如图3所示。

图3 nRF24L01电路图
2.4 GSM模块
数据中转站与远程终端之间的通信采用GSM[5]通信方式。GSM系统包括 GSM 900:900 MHz、GSM1800:1 800 MHz及GSM-1900:1900 MHz等几个频段,其传输距离远,可以容易地实现与远程终端的数据通信。无线GSM通信模块主要通过应用接口和其他终端进行连接通信。
2.5 超声波检测接口电路
超声波测距电路[6]包括超声波激励电路和超声波接收电路,其核心部件为超声波发射与接收探头,探头性能直接影响超声波的发射和接收特性。超声波激励电路的作用是用于激励超声波探头使其将一定形式的激励电压加到超声波探头上,从而使探头上的压电晶片将电信号转换为超声波信号。超声波发射电路如图4所示。

图4 超声波发射电路
系统工作时由STM32的高级定时器将两路占空比为50%、50 kHz的互补PWM信号输入至MAX232的T1IN、T2IN引脚,由于MAX232的片载电荷泵具有升压和电压极性反转的能力,因此能够产生+6 V和-6 V的电压,于是在T1OUT和T2OUT处能产生12 V的电压,从而驱动超声波发射探头发射出40 kHz的超声波。
发射电路通过三极管实现对MAX232的开关控制。为了降低发射电路对接收电路的干扰和电路损耗,在开始发射前打开MAX232的电源,延迟一段时间待电路稳定后开始发射,发射结束后关断MAX232的电源。
超声波接收电路的作用是将接收器接收的超声波信号转换为可供MCU识别使用的电平信号。由于超声波在传播的过程中会有能量的衰减,到达反射面时也会因为存在能量的吸收和散射使得反射回来的回波信号非常微弱,对信号不能直接使用,因此要能检测到有效的回波信号,必须进行滤波放大等一系列处理。水电站水位监测电路的超声波接收电路如图5示。
3 系统软件设计
3.1 主程序设计
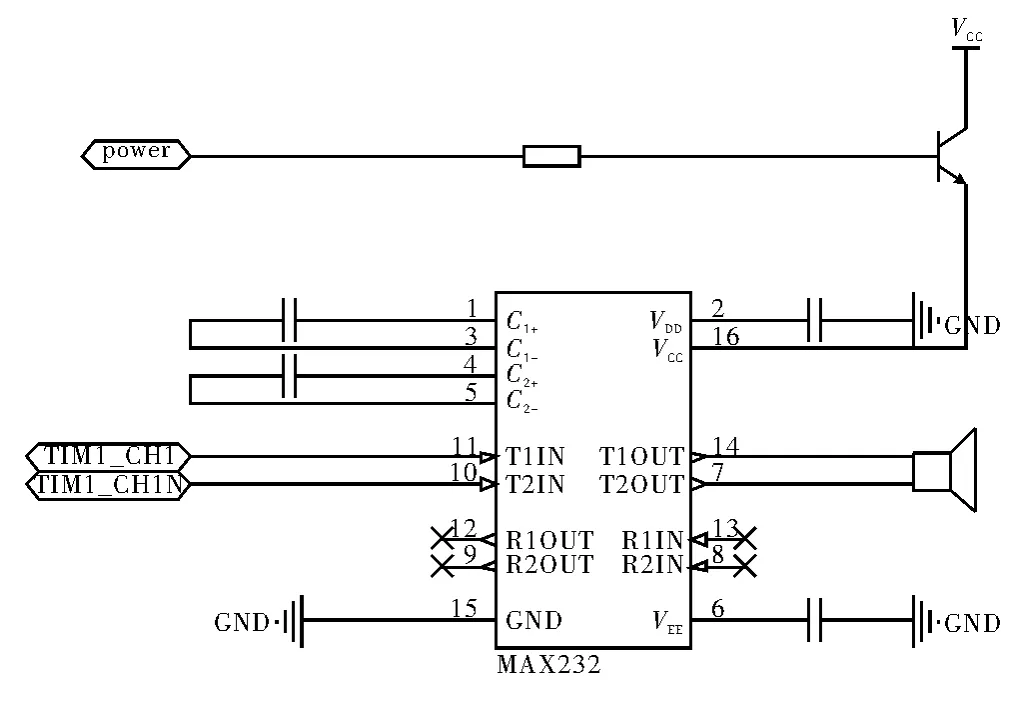
图5 超声波接收电路图
系统软件部分包括nRF24L01数据通信程序、超声波数据采集程序、GSM短信程序以及LCD显示程序。软件设计采用模块化设计思路,将各部分所要完成的任务分模块分别进行编写和调试,本文主要给出nRF24L01数据通信程序和超声波数据采集程序的设计流程图。图6为nRF24L01数据通信程序流程图,图7为超声波数据采集程序流程图。

图6 nRF24L01数据通信程序流程图

图7 超声波数据采集程序流程图
4 实验结果与分析
实验环境是根据水电站实际工作情况在实验室进行模拟的。系统的软件调试部分在RealView MDK 4.7.2环境下实现。通过软件编程产生40 kHz的脉冲信号和模块所发射的信号分别如图8和图9所示。
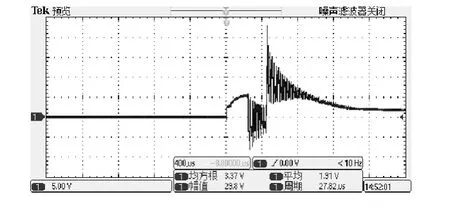
图8 软件编程产生的脉冲信号

图9 发射电路发出的超声波信号
由于接收到的超声波信号很微弱,幅值都在100 mV以内,而且噪声很多,因此需要对超声波信号能够进行检测、滤波以及放大,接收到的超声波信号如图10所示。
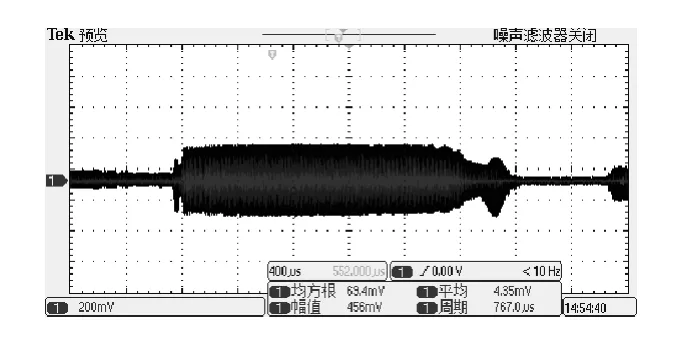
图10 接收电路接收到的超声波信号
接收到的超声波信号经过放大电路和倍压检波电路后,将信号送给比较电路,然后输出只有高低电平信号的数字信号,供单片机接收使用。经过比较电路后的输出信号如图11所示。

图11 比较电路的输出信号
超声波测距模块工作时,超声波发射电路发出超声波信号,信号被液面反射后将信号反射给超声波接收器,被接收电路接收后经过处理,最后将信号以高电平形式输出,高电平信号保持时间的长短即反应发生与接收信号之间的时间差,通过计算时间差就可以计算出与目标物体之间的距离。图12为距离是70 cm时的波形,图13是100 cm时的波形。图中“1”号线表示发出的40 kHz的脉冲信号,“2”表示通过接收电路处理后的输出信号,高电平时间即表示从超声波发射到接收的时间差。可以看出高电平持续的时间与距离成正比。
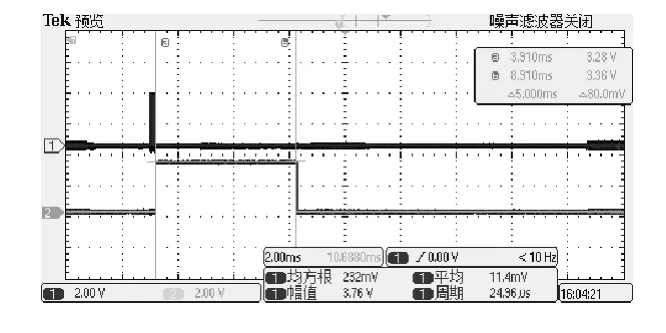
图12 距离为70 cm时的接收信号
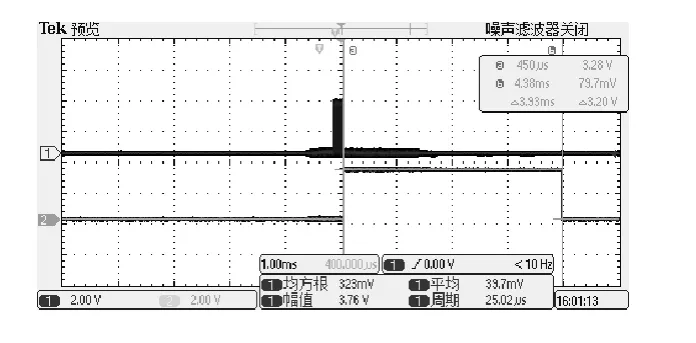
图13 离为100 cm时得到接收信号
表1为对同一距离进行多次测量所得的数据。从表中可以看出,虽然所测距离与实际距离有一定的误差,但均在精度要求范围内,因此符合设计要求。
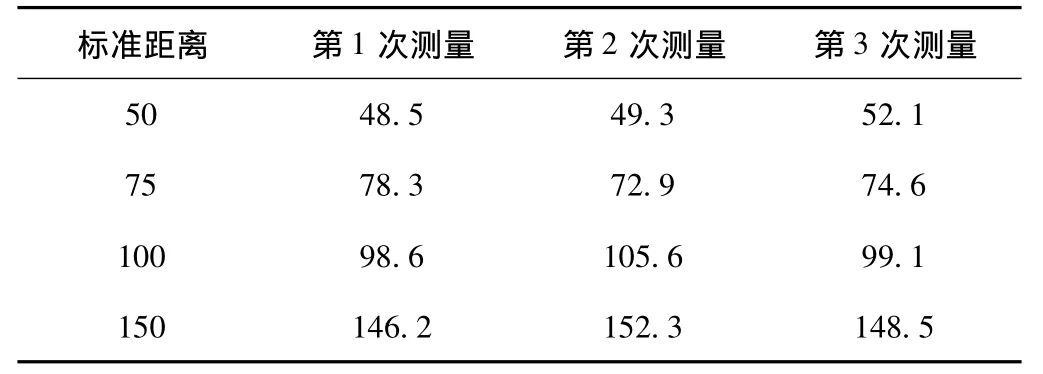
表1 探测距离数据表
5 结束语
水位数据是保证水电站安全可靠运行而必须监测的一个重要数据。本文利用超声波技术设计了一主多从结构的水位自动监测系统,实验表明系统能够实现水电站水位的监测和数据传输的功能,并且系统传输数据精度高,能较好地达到远程监控的目的。
[1]水质环境无线自动检测系统的研究和开发学[J].云南环境科学,2004(1):50-52.
[2]马福昌.水情动态监测新技术[J].山西水利,2005(1):32-34.
[3]郝迎吉.远距离水位智能监控系统的研究与实现[J].仪器仪表学报,2004(6):809-812.
[4]郭伟.超声检测[M].北京:机械工业出版社,2009.
[5]韩斌杰,杜新颜,张建斌.GSM原理及其网络优化[M].北京:机械工业出版社,2009.
[6]袁易全.近代超声原理与应用[M].南京:南京大学出版社,1996.
