KONE卸船机电控系统改造
2015-12-20李国峰宁波港股份有限公司浙江宁波35800武汉船舶职业技术学院湖北武汉430050
陈 凡 赵 磊 李国峰(.宁波港股份有限公司,浙江宁波 35800;.武汉船舶职业技术学院,湖北武汉 430050)
KONE卸船机电控系统改造
陈 凡1赵 磊2李国峰1
(1.宁波港股份有限公司,浙江宁波 315800;
2.武汉船舶职业技术学院,湖北武汉 430050)
简要介绍了原KONE卸船机的电控系统及存在的问题,对可选改造方案进行对比分析,并详细阐述了最终技术改造方案的主要内容。
卸船机;技术改造;直流驱动器
KONE卸船机是公司在九十年代初引进的,代表了当时先进工控水平的散货接卸设备。其钢结构由大连起重机厂承建,全套电控系统由ABB公司提供,并由ABB公司技术人员完成设备的安装调试。投产近二十年来,设备运行稳定,为公司安全高效地运营提供了重要保证。近年来,随着KONE卸船机电控系统老化及部分备品短缺,设备保障压力激增,亟需对原系统进行升级改造。
1 原控制系统简介
原KONE卸船机的电控系统主要包括一套PLC主站(MP200/1)及部分I/O远程站、一套CMS(crane Monitor)、一套RCMS(CAB View)、三套直流驱动器(Tyrak MIdIⅡ)和一套交流变频器(SamI Star)。其中小车和悬臂两个机构互锁,且共用一套直流驱动器;大车机构采用交流变频器驱动;系统控制网络如图1所示。
2 改造方案分析
讨论驱动系统改造方案时,有两个选择:一是采用交流方案。需重新规划电气房驱动器的布置、更换主动力电缆及交流电机的安装固定,优点是后期维护工作量较小;缺点是施工工期较长,改造成本提高。二是采用直流方案。不用更换主驱动电机及主动力电缆,优点是改造成本低,改造工期短;缺点是直流电机维护工作量较大,耗费后期维护成本。对于PLC系统,同样有西门子S7-400系列PLC和ABB AC800M系列PLC两套方案可供选择:西门子的PLC产品具有开放程度高、易于用户维护和后期扩展等优点;ABB的PLC产品具有集成度高体积小、支持ABB开发的起重机专用控制软件等专业软件包。
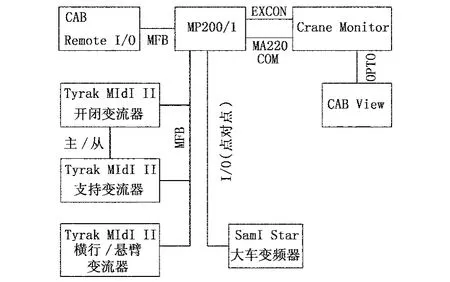
图1 原KONE卸船机控制系统示意图
3 方案设计
综合各种情况后,决定选用ABB公司的PLC产品,并采用直流驱动方案。用AC800M系列PLC及远程站替代原PLC系统,用全数字式DCS800直流驱动系统替代原直流变流器系统。
3.1 驱动器系统选型
驱动器在选型计算时,主要考虑额定电源电压、额定电枢电压、额定电枢电流及运行方式,然后对照选型手册确定型号;KONE卸船机起升、开闭及小车/悬臂驱动机构额定动力电源电压为AC660V,四象限运行方式。大车驱动机构额定动力电源电压为AC380V,两象限运行方式。
3.1.1 起升、开闭机构直流驱动器
考虑实际工况,选择DCⅡ负载类型。因此,直流驱动器额定电流应满足ION,≥In,,且在DCⅡ状态下ION,≥1.5In,;起升、开闭直流电机额定参数:功率Pn=650KW,Un=660VDC,In=1051ADC;
所以,在DCⅡ状态ION,≥1.5In,=1.5× 1051=1577A;
式中ION,-变流器额定输出电流(A)
In
,-电动机额定输出电流(A)
根据手册,选用DCS800-S02-1500-07+S164直流驱动器,满足起升、开闭电机所需额定电压、电流要求及过载要求。
3.1.2 小车/俯仰机构直流驱动器
考虑实际工况,选择DCⅡ负载类型。因此,直流驱动器额定电流应满足足ION,≥In,,且在DCⅡ状态下ION,≥1.5In,;小车直流电机额定参数:功率Pn=360KW,Un=660VDC,In=576ADC;俯仰直流电机额定参数:功率Pn=187KW,Un=596VDC,In=343ADC;由于两个机构共用一套直流驱动器,因此以小车直流电机额定参数为基准。
在DCⅡ状态下ION,≥1.5In,=1.5×576 =864A;
根据手册,选用DCS800-S02-0900-07+S164直流驱动器,满足小车电机所需额定电压、电流要求及过载要求。
3.1.3 大车机构交流驱动器
大车机构包括10台交流异步电动机,电机的额定参数:功率15KW,额定电压380V,额定电流34A。交流调速系统,通常根据电动机的额定电流值或电动机实际运行中的最大电流值来选择变频器容量,即驱动器额定电流应满足
ION≥(1.05~1.1)In;
式中ION-变频器额定输出电流(A)
In-电动机额定输出电流(A)
考虑到卸船机整机防风能力及运行后期轨道轻微变形等情况,要求变频器有较大过载容量,因此
ION≥1.1In=1.1×(34×10)=374A
根据手册,选用ACS800-07-0400-3交流变频器,满足大车电机所需额定电压、电流要求及过载要求。
3.2 PLC系统选型及软件设计
选用ABB最新的AC800M系列PLC系统代替原MP200/1PLC系统,根据原PLC系统的I/O资源,确定所需的开关量、模拟量模块和远程模块的型号及数量。改造所需的PLC各种模块规格参数及数量如下表1所示。

表1 改造所需的PLC系统各模块信息表
3.3 软件设计
原起升/开闭机构的直流变流器内置了抓斗控制器“Grab Controller”功能,而新的DCS800系列变流器内无法编程实现抓斗控制器功能,所以需要在AC800M主PLC内编程实现上述功能。除了内置了起重机抓斗性能优化软件,AC800M主PLC内还包括起重机专用控制软件、起重机智能防摇软件、起重机半自动控制软件等。
4 改造效果
通过对KONE卸船机原电控系统进行部分升级改造,解决了系统存在的疑难问题。完成调试并投入运行以来,设备运行状态良好,达到了预期目标。同时,该设备的成功改造也为同行业类似设备的技术升级提供了一定的借鉴意义。
1 北京ABB电气传动有限公司.硬件手册:DCS800直流传动(20至5200A)[R].2008
2 吴忠智,吴加林.变频器应用手册(第2版)[M].机械工业出版社.2002
3 北京ABB电气传动有限公司.硬件手册:ACS800-04/P传动模块(90-560KW)[R].2005
On Electric Control System Reform of Ship Unloading Machine
CHEN Fan1,ZHAO Lei2,LI Guo-feng1
(1.Ningbo Port Group Co.,Ltd,Ningbo 315800,China;
2.Wuhan Institute of Shipbuilding Technology,Wuhan 430050,China)
The electronic control system and the existing problems of the original KONE ship unloaders are briefly introduced,and the coMParison and analysis of the alternative retrofit schemes are introduced,and the main contents of the final technical reformation scheme are described in detail.
Ship unloaders;Technological transformation;DC drive
U672.3
A
1671-8100(2015)06-0022-02
(责任编辑:张 辉)
2015-09-13
陈 凡,主要从事船舶电气方面研究工作。