海上水声信号处理算法中的物理特性仿真研究
2015-12-20贾建伟
贾建伟
(江苏联合职业技术学院扬州分院,江苏 扬州225002)
0 引 言
随着海洋开发和海洋科技的发展,水声信号处理技术变得非常活跃,这种技术在海洋环境监测、海洋资源勘探、军事演习等方面有举足轻重的作用。由于海洋环境千变万化,水声信号处理往往受到风浪流的的影响,因此研究水声新的定位,以及对信号进行处理能够更有效地提取有用信息进行数据处理分析。
本文通过研究海上水声信号的产生和海上水声信号定位系统的构成,设计水声信号处理系统流程,指出陆地上的主控中心与水中的基站如何进行信号数据传递,以及环境噪声、传输损耗、多径传输、多普勒效应等物理特性对信号偏移产生何种影响。最后通过实验进行验证,为了解决当子载波在频域内不正交时的水声信道传输问题,在接收端加入滤波器通过SINR 增益值来说明如何消除多普勒偏移的影响。
1 海上水声信号的产生
本文利用图形化编程语言LabView 海上水声信号的仿真。现实中,海上水声信号为频带宽度较小的信号,表达式为[1]:

式中:a(t)为载波幅度;φ(t)为载波相位;f0为信号载频;T 为工作周期。
本文进行声呐信号仿真的方式为采用正旋单频信号对FM 进行调频以及对DSB 进行单边幅度调制。整个过程如下[2]:
令接收到的调制信号为m(t),载波信号为p(t)=Acos(2πfct),利用调制信号去控制载波信号的频率得到的FM 信号为:
于是得:

设a(t)=m(t)对载波信号进行第2 次调制,然后用DSB 去调制sFM(t),因此获得模拟水声信号s(t)。
2 水声信号的定位以及处理
1)海上水声信号定位系统的构成
水声信号定位的方式为通过无线电进行声定位。有陆面上的控制中心和海中的基站组成。PC 机、数据采集器、无线收发器组成了陆上的控制中心,传感器、无线收发器、水中控制器主城了海中的基站。在进行信号定位时,陆上的控制中心将各个控制信号通过无线电装置传送到水中的基站,由此可以控制基站中装置的初始值、校验值以及开启运作模式。在基站接收到工作信号后将进行数据采集,主要是将传感器采集的信号进行隔离、放大、滤波处理,以及将电压变换到将模数转换器的范围内,然后发送给数字转换器进行抽样、量化、编码,然后在接收到主控中心的信号后交给陆上处理,然后在PC机进行分析处理,然后利用达到时间差定位方式进行定位,实现方式如图1 所示。
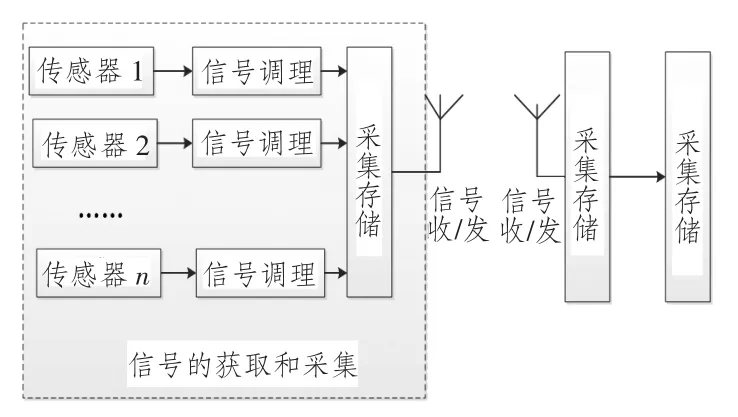
图1 水声信号定位实现方式构成图Fig.1 Structure diagram of acoustic signal orientation implementation
2)水声信号处理系统流程
主控中心开始运行时给海中的基站发送指令,让其初始化,然后将返回的信息显示在主控的PC机上;系统各个模块处于待接收数据的状态,并且对传感器、数据采集卡等装置进行参数配置,若有触发信号则硬件开始工作,在接收到指令后软件开始工作,进行数据的采集、存储、分析;通过无线电将基站的信息反馈到主控中心,并且存储在数据库中以备对数据进行分析整理,结果在PC 机上显示出来。在整个系统中设置了安全监测实时诊断系统是否处于正常运转状态,当发现出现故障,主控中心第一时间会发送指令停止运行。
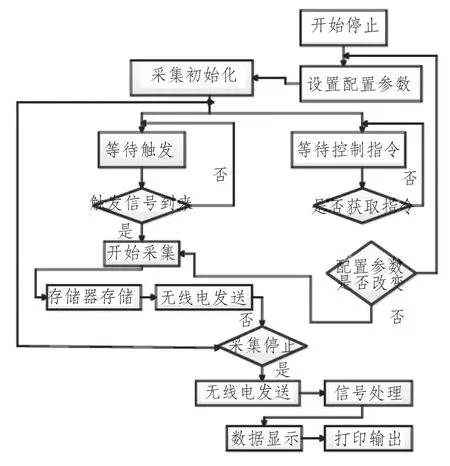
图2 水声信号处理流程图Fig.2 Flow chart of the underwater acoustic signal processing
海域的温度、盐分、潮流都会影响传感器对信号数据的采集,因此水声信号处理对于物理特性的仿真非常重要。
3 水声信道的物理特性
海上水声信道是一个时频变化,外界环境影响大的多重干扰信道,其物理特性主要包括环境噪声、传输损耗、多径传输、多普勒效应引发的信号偏移。
1)环境噪声
海上水声信号往往受到洋流潮汐船舶活动等噪声影响。通过频率与分贝之间的转换可知:海上噪声为1 ~20 kHz 对应的分贝为40 ~70 dB,频率与噪声成反比,频率越小,噪声越大,若噪声的频率在1 kHz 以下,噪声谱在70 dB 以上,由此可得,传输信号时载波的频率与海上噪声有关,一般将基站的载波频率设置为1 kHz 以上。
尽管海上噪声的大小决定了信噪比和发射功率,但在做物理特性分析时,一般将1 ~20 kHz 频率内的噪声近似为高斯噪声,如图3 所示。
图3 高斯噪声示意图Fig.3 Schematic diagram of the gauss noise
2)传输损耗
声波在水中传播时由于吸收、散射等问题发生衰落,当声波频率大于1 kHz 时,声波衰落的原因是海水对声波的吸收,衰减大小与声波频率的平方有关,海水对声波吸收系数经验值为[3]:

式中:f 为声波频率;α 为每公里的分贝数。
一般情况下,海上通信设置的载波频率小于50 kHz,根据文献[4]可知水中通信距离和传输速率之间的关系为:

式中:第1 个R 为通信距离;第2 个R 为传输速率。
声信号在扩散的过程中会按照一定的规则衰减,当传播距离较远时,距离越大,声波会按照R-3/2的规律衰减[5]。由此可得声信号的损失为:

式中:R 为传播距离;α 为声波的损失系数(dB/km)。
3)多路径传输
由于海底和海面之间的N 次反射或者折射使得声源信号在抵达接收器的时候会有不同的路径。同时会影响信号的幅度变小、频率变低和解码之间的干扰增强,从而严重影响了主控中心接收到的信号质量。
4)多普勒效应产生频率的偏移
信号发送端和接收端之间产生的相对位移,引起当二者靠近时频率增大,二者远离时频率减小。若发射器端的运动速度为vs,接收端的运动速度为vr,可知发射频率为fs的信号到接收端后频率变为[6]:

式中:vr和vs为从发射端指向接收端为正方向的向量;fs为发射频率;fr为接受频率;c 为水中的声速,一般情况下c = 1 500 m/s。
当fs= 15 000 Hz,vs= 3 m/s,vr= -3 m/s,接收频率fr= 15 060 Hz 时,多普勒频率偏移为:

信号发送端和接收端之间没有产生相对位移时,由于风浪流等因素的影响,信号会因为这些因素而被调制,同样会使接收端的频率发生偏移,根据参考文献[7]可知频移为:

式中:fw为波浪的运动频率;hw为波浪的高度均方值;w 为风速大小;c 为水中的声速,一般情况下c =1 500 m/s;θ0为声波到达接收端时的入射角。
假设海上的风速v = 20 kn,则信道的多普勒频率为28.23 ~43.75 Hz。
由上述可知:海上风浪流等形成的噪声对信号的传播接受造成很大的影响,使得传输损耗增大,接收信号的信噪比也减小,低频率的控制波使得传输速率低,并且多普勒效应产生的频率偏移越大,信道的衰减就越快,接收端接收到的信号波形越不能逼真的反应发送端的数据。
4 物理特性仿真
在接收端利用加入滤波器来消除多普勒偏移的影响。
载波的频率f = 8 kHz,风速k = 10 kn,声速c= 1 500 m/s,水的深度50 m,接收端与发送端的距离200 m,最大延时τmax= 0.073 3 s,子载波数N =1 024,子信道带宽B = 13.28 Hz,时间间隔Ts=0.148 6 s。从而得到信号发送端和接收端之间产生的相对位移时,经补偿后剩余的多普勒频率偏移为Fd= 1 Hz 和Fd= 2 Hz,此时加入消除滤波器后得到的SINR 增益比较如图4 所示。
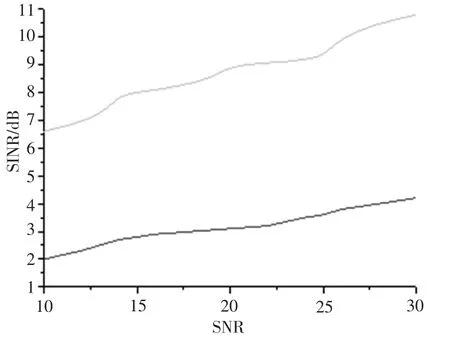
图4 加入消除滤波器后得到的SINR 增益比较图Fig.4 Comparison of SINR gain
信号发送端和接收端之间没有产生的相对位移时,由于风浪流等因素影响SINR 增益。第i 条路径经补偿后余下的多普勒频率偏移fl= Fdcosθl,式中Fd= 1 Hz 和Fd= 2 Hz,各个声波到达接收端时的入射角θl分别为0.072 3 π,0.548 6π,0.753 1 π,0.570 8 π,0.032 0 π,0.947 8 π。加入消除滤波器后得到的SINR 增益比较如图5 所示。
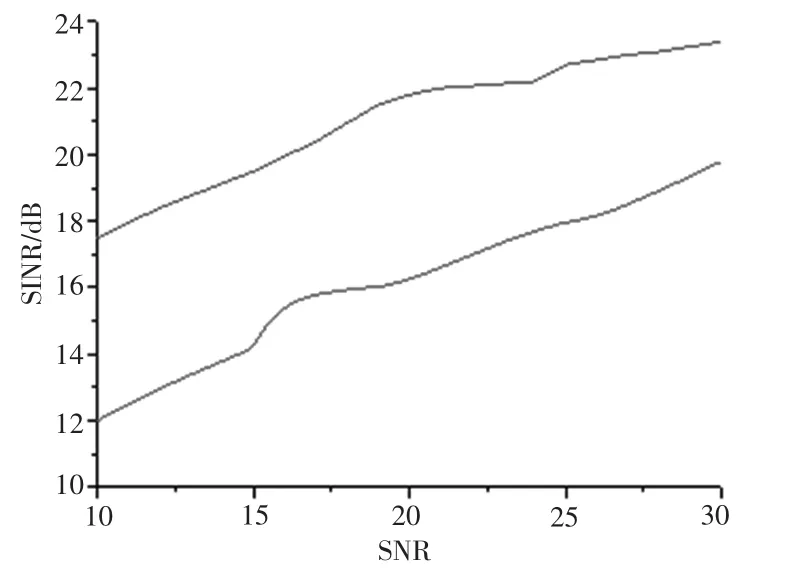
图5 无相对于运动时加入消除滤波器后得到的SINR 增益比较图Fig.5 Comparison of SINR gain when no relative movement
从图4 ~图5 可知,加入消除滤波器后多普勒频率偏移的SINR 增益增大,即图中浅色曲线。并且偏移量越大,加入滤波器后的效果越显著,从而有效地解决了当子载波在频域内不正交时的水声信道传输问题。
5 结 语
本文通过研究海上水声信号的产生和海上水声信号定位系统的构成,设计水声信号处理系统流程,指出陆地上的主控中心与水中的基站如何进行信号数据传递,以及环境噪声、传输损耗、多径传输、多普勒效应等物理特性对信号偏移产生何种影响。最后通过实验验证加入消除滤波器后可以有效地控制多普勒效应产生的频率偏移。
[1]田坦,刘国枝,孙大军.声呐技术[M].哈尔滨:哈尔滨工业大学出版社,2006.TIAN Tan,LIU Guo-zhi,SUN Da-jun.Sonar technology[M].Harbin:Harbin Institute of Technology Press,2006.
[2]杨政,杨春武,王明洲,等.基于切片谱的主动水声信号处理方法[J].舰船科学技术,2012,34(10):77 -80.YANG Zheng,YANG Chun-wu,WANG Ming-zhou,et al.Active underwater acoustical signal processing based on slice spectrum[J].Ship Science and Technology,2012,34(10):77 -80.
[3]Thorp.Deep ocean sound attenuation in the sub-and lowkilocycle-per-second region [J].Acoustic Society of American,1965(38):648.
[4]李启虎.水声学研究进展[J].声学学报,2001,26(4):295 -301.LI Qi-hu.Advances of research work in underwater acoustics[J].ACTA Acustica,2001,26(4):295 -301.
[5]列·不列霍夫斯基赫,扬.雷桑诺夫.海洋声学基础.朱柏贤,译.北京:海洋出版社,1985.BREKHOVSKIKH L,LYSANOV Y.Ocean acoustics foundation[M].ZHU Bo-xian,Translate.Beijing:Ocean Press,1985.
[6]许俊.水声语音通信研究[D].厦门:厦门大学,2001.XU Jun.Underwater acoustic voice communication[D].Xiamen:Amoy University,2001.
[7]STOJANOVIC M.Recent advances in high-speed underwater acoustic communicati-ons[C]//IEEE Jour.of Oceanic Engineering,1996,21(2):125 -136.
