基于水声通信的水下机器人协作技术研究
2015-12-20方雁峰
方雁峰
(绍兴文理学院元培学院,浙江 绍兴312000)
0 引 言
随着世界人口的不断增长以及经济全球化的快速发展,使得资源紧缺的问题日益严峻。为了解决资源匮乏,世界各国越来越重视海洋资源的开发与利用,近年来,随着计算机技术的迅猛发展,水下机器人技术[1]成为目前最受关注的热点研究内容,并取得长足发展,得到了广泛应用。本文以水下机器人协作作为应用背景,分别对水声通信技术和水下机器人协作方法进行研究,由于水下信号环境复杂,噪声及干扰诸多,因此,稳定、快速、准确的通信手段对于水下机器人至关重要。本文给出水下机器人的整体设计方案,重点介绍其通信模块使用的技术,即水声通信中的OFDM 技术。
1 水声通信
水声通信技术是一种在水下发射和接收信息的技术,其发射端的主要工作过程:首先运用数字化处理技术将声音、图像、文字等待发送的信息转变为电信号,再利用转能装置将电信号转化为声信号,然后以水作为媒介将声信号传递出去。接收端的处理过程是发射端的逆过程,即先将声信号转化为电信号,再将电信号转化为声音、图像、文字等信息。水声通信系统的整体结构如图1 所示。
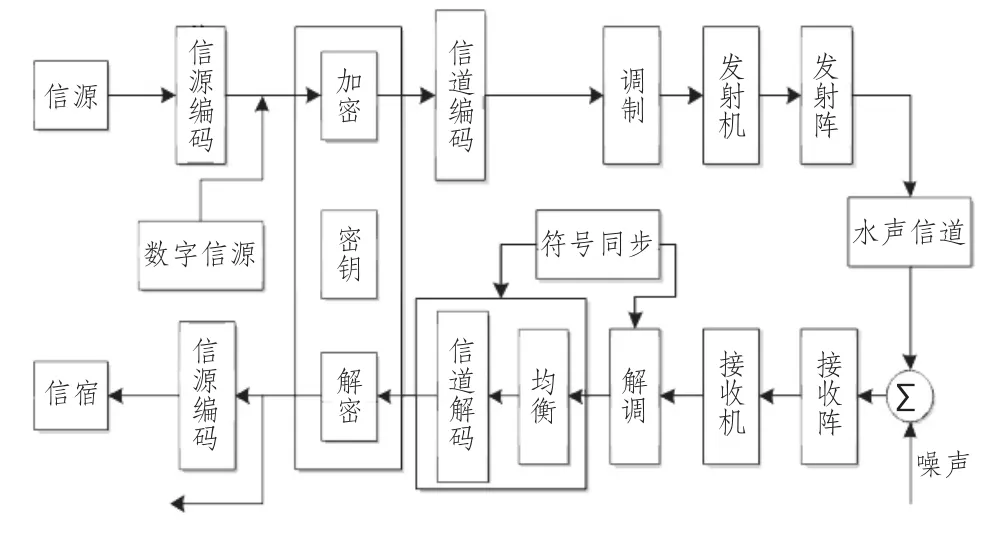
图1 系统方框图Fig.1 System block diagram
由于海洋中有海面与海底2 个面,加之噪声干扰多、介质分布不均匀、容易受到温度、盐度等因素影响,使得水声信道环境非常复杂[2]。水声信道的主要特点如表1 所示。

表1 特点总结Tab.1 Features summary
水声信道的调制方法主要包括非相干通信和相干通信两类。两类方法的分析对比情况如表2 所示。

表2 对比情况Tab.2 Comparison sheet
2 水下机器人
2.1 水下机器人
本文给出的机器人整体设计方案如图2 所示。系统各个组成部分及作用描述如表3 所示。
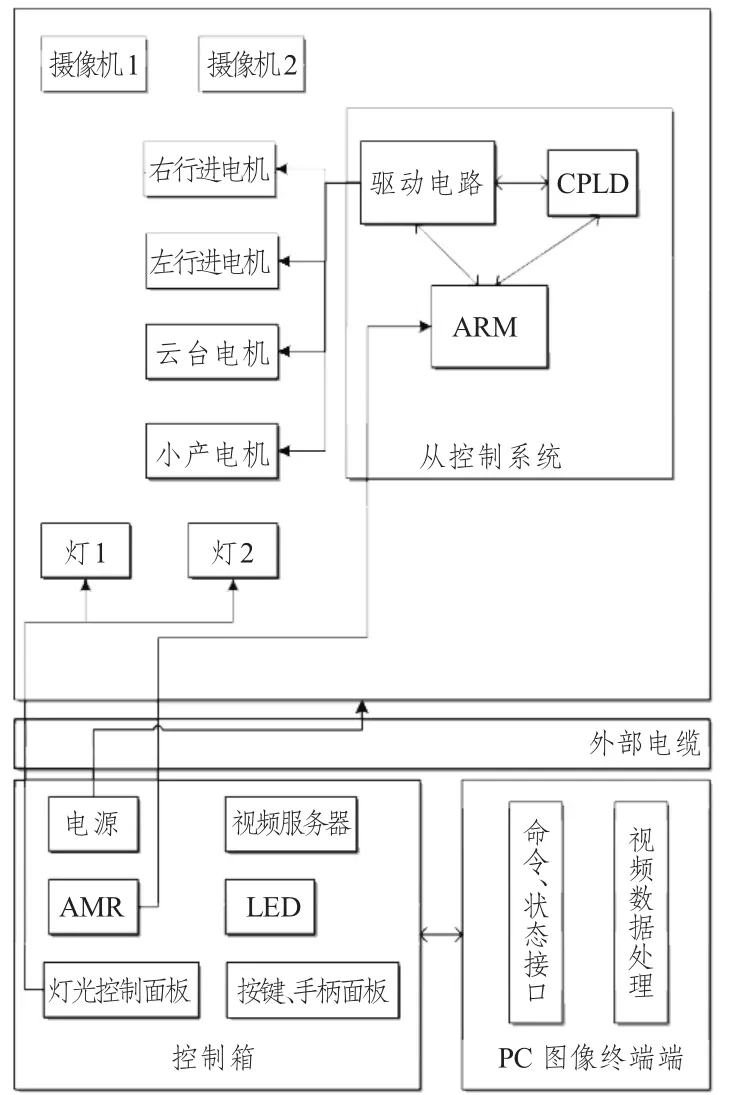
图2 设计方案Fig.2 Design program
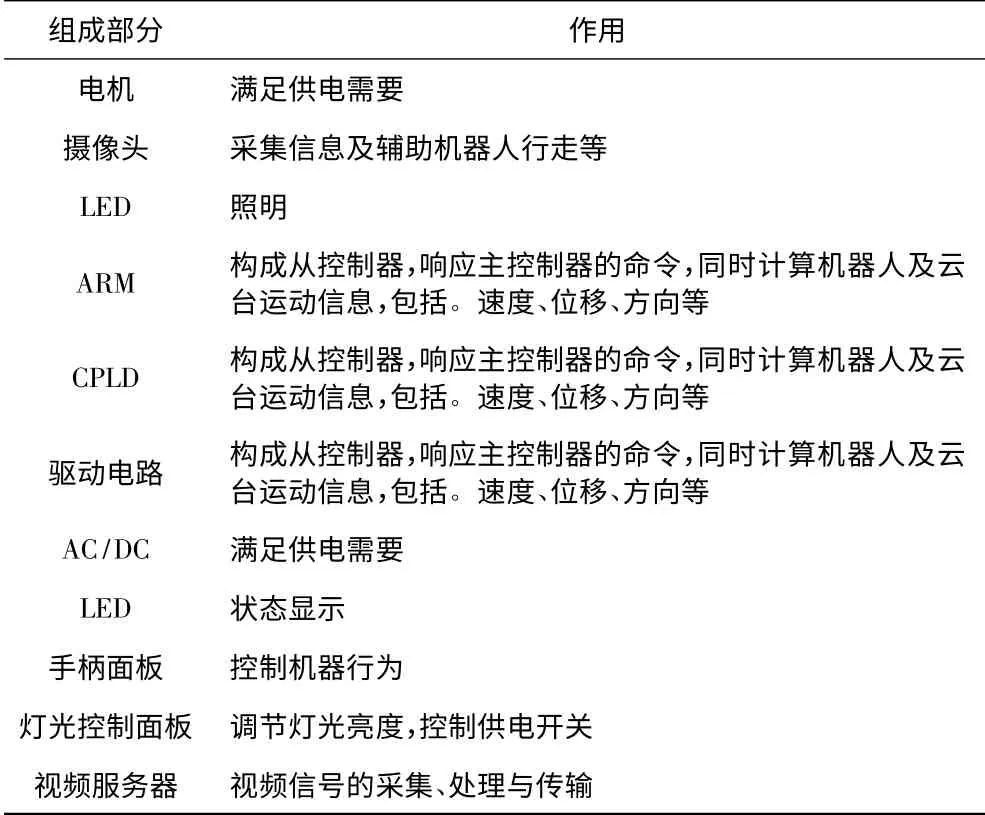
表3 特点总结Tab.3 Features summary
目前较为常用水下机器人的协作方法包括基于行为的智能控制方法[3]和基于市场拍卖模型的任务分配方法[4]。本文重点研究水下机器人的通信方法。
2.2 水声通信中OFDM 的应用
本文,通信技术采用水声通信中的OFDM 技术[5],采用OFDM 的主要思想是将频域信道划分为多个正交的子信道,然后对每个子信道进行载波调制,并行传输。该技术能够有效利用频带,有效抑制符号间干扰。
设OFDM 的输出信号为:

那么加入循环前缀后,其码元的时域可以表示为:

其中Tg为间隔保护。
而OFDM 的时域完整信号为:

式中:d(m,n)为第m 个符号、第n 个子载波的调制数据;g(t)为符号的脉冲波形,为:
信号在接收器端表示为:

式中:h(τ,t)为脉冲响应;n(t)为高斯白噪声。
对上式进行傅里叶变换后得到:

假设:

式中:h0为主信道中信号复包络;hm为第m 子信道中信号复包络;τm为第m 子信道的时延。
假设τm≤T′,那么τm分为:
0 ≤τm≤Tg,(m = 1,…,M1),
Tg≤τm≤T + T,(m = M1+1,…,M1+ M2)。
式中,M1≤传输的路径数目;M2>传输的路径数目,可以得到:

在本文中,采用PASM 信道估计方法,其过程为:
1)导频插入方式,本文方法采用块状导频法。
2)导频信道估计,
设发射信号为:x(n);
信道脉冲响应为:h(n);
高斯白噪声为:w(n),那么接收器端接收的信号可表示为:
y(n)=x(n)⊗h(n)+ w(n),
对y(n)进行FFT 调制可得:
Y(k)=FFT{r(n)}= H(k)X(k)+ W(k),
式中H(k)、X(k)和W(k)分别为h(n)、x(n)、w(n)的频率域表示。将上式改写为:
Y=XFh + W,
其中,
3)内道估计
设信道响应为H(k,l),导频处信道的响应为Hp(k,l),那么两者之间的关系为:

时间方向的内插公式为:
式中:0 ≤n ≤ΔT-1,mΔT≤l ≤(m +1)ΔT,ΔT为插入的时间间隔。
同理,频率方向的内插公式为:
其中,0 ≤q ≤Δp-1,pΔp≤k ≤(p +1)Δp,Δp代表插入的频率间隔。
在二维导频情况下,采用的方法为:

根据上述方法进行仿真实验,相关实验数据如表4 所示。
3 结 语
本文对水下机器人协作技术进行研究,重点研究了水声通信在水下机器人中的应用,给出了水下机器人的整体设计方案,详细介绍了基于OFDM 技术的水下通信方法,根据仿真实验结果,本文提出的通信方法具有较低的误码率及较高的通信速率。
[1]徐玉如,苏玉民.关于发展智能水下机器人技术的思考[J].舰船科学技术,2008,30(4):17 -21.XU Yu-ru,SU Yu-min.Think on the development in autonomous underwater vehicles[J].Ship Science and Technology,2008,30(4):17 -21.
[2]田甜,张亮,曾岩艳.基于基于DS-DPSK 的水声扩频通信系统仿真[J].舰船科学技术,2009,31(10):120-122.TIAN Tian,ZHANG Liang,ZENG Yan-yan.The simulation of hydroacoustic spread spectrum communication system based on DS - DPSK[J].Ship Science and Technology,2009,31(10):120 -122.
[3]BROOKS R.A robust layered control system for a mobile robot[J].IEEE Journal of Roboties and Automation,1986,2(1):14 -23.
[4]黎萍,杨宜民.多机器人系统任务分配的研究进展[J].计算机工程与应用,2008,44(17):201 -206.LI Ping,YANG Yi-min.Progress of task allocation in multirobot systems[J].Computer Engineering and Applications,2008,44(17):201 -206.
[5]李引新,赵姚同.正交频分复用(OFDM)的实现方式及性能分析[J].电讯技术,1998,38(6):10 -15.
