基于DSP的船舶电力系统智能通信电源设计
2015-12-20彭仁松
彭仁松
(武汉船舶职业技术学院,湖北 武汉430050)
0 引 言
随着电力电子技术和船舶技术的迅猛发展,种类繁杂、数量庞多的高端电力电子设备越来越多地应用在船舶这一重要的交通工具上,保障着船舶的可靠运行。然而这些电子设备的正常运行状态依靠船员逐一地去监视、控制与记录,势必会耗费船员大量的精力与时间,同时对设备的维护管理也不利,所以通信设备在船舶上的使用势在必行。
通信设备可以实现对各种被控对象的集中监控,实时地更新各种电力电子设备的状态,可以迅速地处理各种非正常工作状态和故障情况,提高了对整个电力电子设备的管理效率[1]。
而监控高效通信设备的正常运转都离不开电源的电力供应,所以通信电源在监控系统中必不可少,可称之为整个通信系统的“发动机”。通信电源如此之重要,那么实际通信电源的规格也制定得势必越来越严苛:
1)首要一点要做到能够长期可靠地运行;
2)输出电压的波动范围要求更窄,一般小于1%;
3)功率因数与效率要求愈严;
4)负载动态响应要求更高
发展至今,通信电源不仅仅需要提供电力供应,而且还需要越来越多智能的功能,比如发生故障时可以自检发出报警信号,可以实现遥控、遥测功能等。
本文主要针对应用于船舶电力系统中的实际通信电源研究了基于DSP 的设计方案[2]。
1 智能通信电源结构
图1 为智能通信电源系统结构示意图,主功率部分包括AC 配电、并联整流单元、DC 配电、备用电池组。控制部分主要为主功率电路工作状态提供监控功能,监控模块采用RS485 串口总线一方面监视整个通信电源系统的实时状况,反映到监控屏,另一方面根据系统实际情况,接受远程或者近端监控上位机的指令,对通信电源的带载进行实时调整。基于本文研究重点,下面对主功率电路结构进行阐述说明。
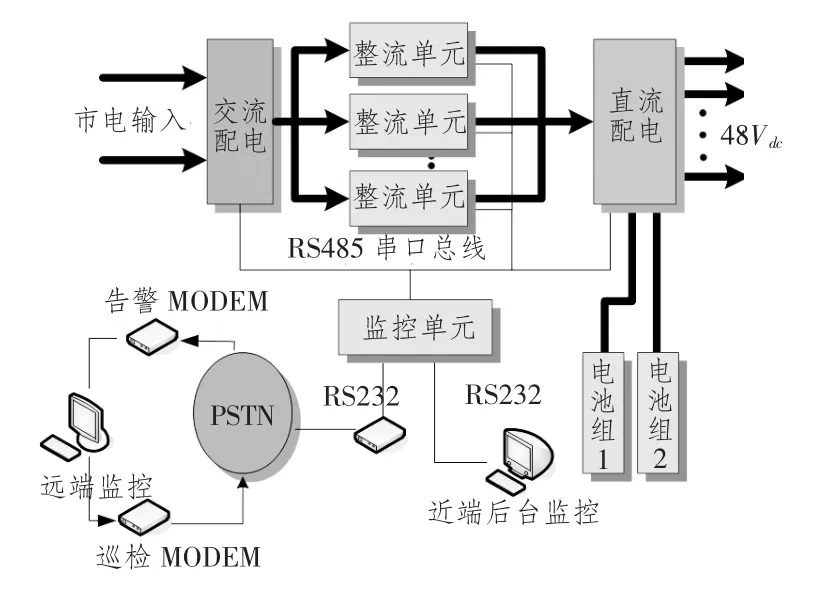
图1 智能通信电源系统结构示意图Fig.1 The structure diagram of intelligent communication power supply system
1)交流配电。该单元将接入的市电(通常是柴油机)经过相应的保护装置后输出至后级的整流模块。保护装置通常包括带有遥信功能的浪涌抑制器、自动空气开关、熔断器等,另外还会配有检测、报警及显示功能。
2)整流单元。该单元将AC 配电网络提供的AC 电压整流为48Vdc送入至DC 配电部分,通常在大功率输出场合通常是由N 个相同的部分并联起来。以前国内采用晶闸管SCR 运用相控整流的方式,由于开关管运行于低频50 Hz,使得整个系 统功率密度很小,并且对电网谐波污染大,故绝大部分已逐步被淘汰。
3)直流配电。该部分将整流模块产生的直流输出分配到系统不同容量的负载中;同时并入蓄电池组一方面可在主功率故障时为系统提供备用电源,另一方面在电池容量不足的情况下,可通过直流配电单元蓄能。
2 通信电源总体设计方案
根据船舶电力系统的交流配电及通信负载的实际需求,本文设计的通信电源规格如下:
1)输入交流电压为单相220 V,变化范围±20%;
2)输出直流电压为48 V,变化范围为43 ~58 V;
3)输出满载直流电流为20 A;
4)输出电压波动指数小于等于±0.2%;
5)整机功率因数至少0.99;
6)整机效率大于等于88%;
7)散热条件为强迫风冷;
8)功率器件最大温升为40℃。
根据上述给出的实际通信电源规格,选择最为合适的主功率拓扑结构。
由于对整机的PF 值有要求,故需要添加PFC电路,对于该部分电路结构有如表1 几种方案的比较。
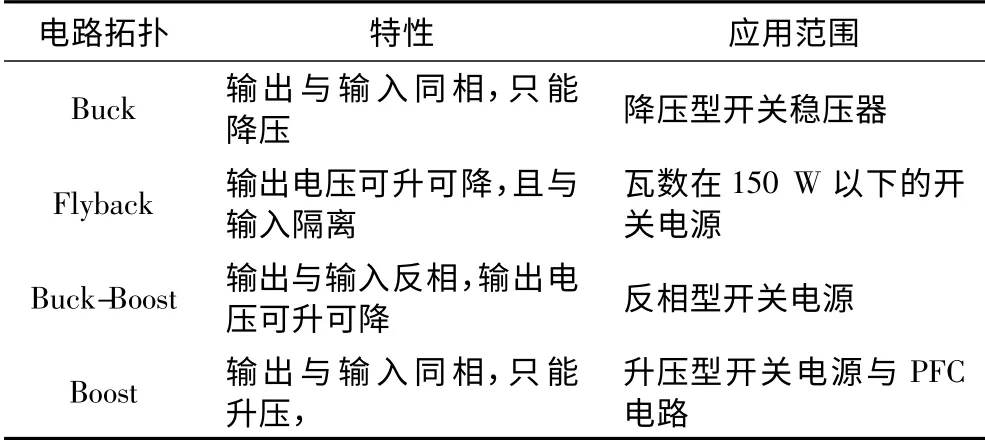
表1 实现PFC 功能的拓扑比较Tab.1 The comparison of different topologies for achieving PFC
由于前级需要为后级DC/DC 提供稳定的直流,且大功率场合通常采用Boost 方案,由于本通信电源瓦数接近1 000 W,所以选用Boost 拓扑结构,采用CCM 的控制模式[3]。
对于后级DC/DC 电路而言,各种不同类型拓扑结构适用条件表2。

表2 DC/DC 拓扑比较Tab.2 The comparison of different DC/DC topologies
由于本通信电源输出功率48 ×20 =960 W,为大瓦数输出,基于表2 的比较,采用全桥作为DC/DC 的拓扑结构。实际中为了提高整机的功率密度,需要将全桥的开关频率尽量提高,以最大限度地降低磁性元件的重量和体积,但又不能显著地增加功率开关管的损耗,这就需要用到电源领域流行的软开关技术,而最为成熟的要属PSFB ZVS PWM 直直变换器。所以本电源系统的拓扑结构为:CCM PFC+PSFB,如图2 所示。

图2 通信电源总体设计构架Fig.2 The design scheme for the whole communication power supply system
3 数控电路设计
目前许多用于通信领域的高频电源为纯模拟亦或是模拟和数字兼有的控制模式[4]。尽管模拟控制IC 已相当的成熟,但对于大功率较为复杂的拓扑而言,仍然存在外围器件数量庞多、控制线路复杂,灵活性较差等缺陷。随着半导体、微电子技术的发展,各种专用集成电路如雨后春笋般地出现,并且随着市场上需求的增大性价比不断提高,功能也不断完善。数字控制在相当大程度上可以免除模拟控制的上述缺陷。采用数控的高频开关电源有着以下显著的优势:
1)数字化后的信号,可以尽量降低模拟信号的传输中带入的干扰,比如磁性器件电磁干扰、开关管通断噪声;
2)可以在数字编程基本不变或者稍作变化的情况下,允许不同硬件系统采用该数字平台实现新的功能;
3)对于需要完成相同的计算功能,可用软件代码替代原本的模拟电路,大大地简化了外围电路的结构;
4)灵活性好,很多功能的验证可以直接通过修改软件代码的方式,而不用更改硬件电路参数,比如PID 参数的整定,大大地提高了研发人员的工作效率。
基于此,本通信电源采用TI 公司的数字芯片DSP TMS320F2812 用作主控IC。该芯片150 MHz 的主频,使得控制器的计算处理能力得到极大地提升,目前已广泛应用于高功率电源、电机控制、工控等领域。
3.1 PFC 级控制
上文中提到PFC 级电路采用CCM 控制模式,并选用最易于达到的控制方式——平均电流控制,以满足规格中PF 值的要求。
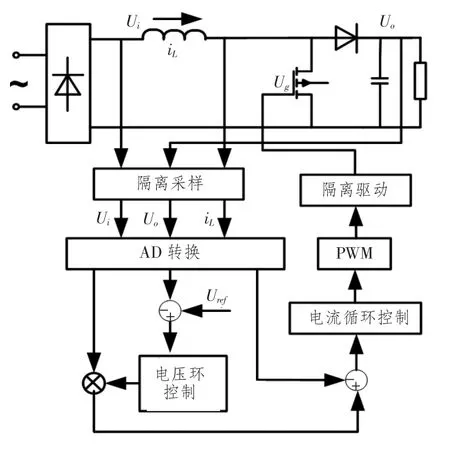
图3 PFC 数字控制结构框图Fig.3 The block diagram of PFC controlled by digital system
该控制框如图3 所示,主要由PFC 主功率回路、AD 采集环节、驱动电路、PI 调节器与DSP 处理器构成。与传统模拟控制器相比,电流与电压PI调节器分别取代了电流与电压误差放大器,基于DSP 内部精准的时钟,通过程序代码来设定调节器的参数。
DSP 的AD 口需要采集PFC 的输入电压Ui、输入电流iL和输出电压Uo,由于DSP 供电电源与PFC 主功率不共地,故需在所有的采样信号前增加一隔离电路。由于要使PFC 输入电流与输入电压同相位,需要跟随输入电压的变化,首先会将采集到的输入电压Ui送至乘法器的一个口中,另外为给后级电路提供稳定的直流电压,需要将该级输出电压Uo采集进入后与DSP 内部的参考电压比较后经PI 调节器送至惩罚器的另一个输入口。这样乘法器的输出一方面具有输入电压的相位特性,另一方面具有输出电压的幅值特性。乘法器产生的信号被看作电感电流iL的参考量,电感电流与该值作差后通过比例积分放大以后送入至全比较器,用来更新相应的比较寄存器中的值,通过软件实时地将该值赋到PWM 信号的占空比中,由于该PWM 信号幅值只有3.3 V ,需要通过隔离驱动以产生用以控制功率MOS 管的驱动脉冲。通过CCM 模式的平均电流控制方式,使得输入电流跟输入电压具有一致的变化趋势,最终达到同相位的目的,即提高了整机的PF 值,同时也稳定了输出直流电压。
3.2 PSFB 级控制
图4 为电路同样通过DSP 的模拟输入接口差分采集输出电压Uo与电流Io。采集输出电流作用实时监控该电源负载的情况,而采集输出电压则为了构成电压闭环反馈控制,使输出电压稳定。由于采样上述信号时会涉及到采样频率的设置,采样频率的选取会影响到系统的稳定性与可靠性。采样频率高对DSP 的处理字长和计算精确度要求更苛刻,但会满足系统更高的带宽要求。本通信电源后级的开关频率设定为100 kHz,根据Shannon 采样定理,电压的采样频率设为100 kHz,电流为200 kHz。
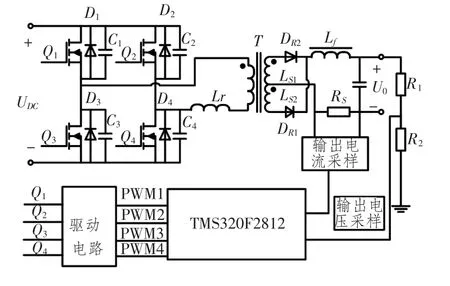
图4 PSFB 数字控制结构框图Fig.4 The block diagram of PSFB controlled by digital system
借助于差分AD 采集到的输出差分电压,经过信号调理电路后,输出到比例积分控制器的输入口后,基于DSP 内部相应定时器的时基,产生用于移相控制的驱动波形,该驱动的开关频率为100 kHz。
4 数控软件流程
本节主要针对基于DSP 的数字控制进行程序部分的设计[5]。本系统程序主要包含主程序、模拟采集子程序及中断服务子程序。中断子程序包括硬件检测触发产生的故障与软件监控产生的报警。
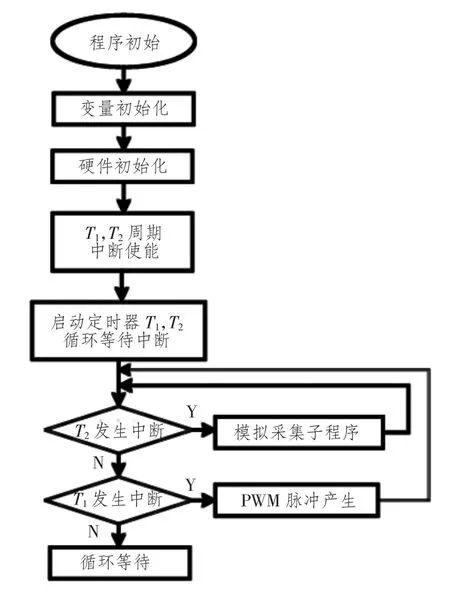
图5 基于DSP 的软件控制时序图Fig.5 The sequence diagram of software control based on DSP
进入主程序入口,首先要对各种变量初始化,DSP相关硬件功能初始化,包括定时器、AD 口、PWM 口等,还有针对产生中断的各子程序的调用。PFC 输入电流的软起控制、各种模拟量的采集、PWM 信号的产生、PI 调节器的参数均通过程序来控制实现。针对不同类别的子程序,配置不同的先后次序。优先级顺序依次为:保护→采样→PMW 驱动信号→显示。
针对主程序的控制时序图如图5 所示,定义系统初始化的状态,使硬件状态初始化,然后空闲下来,直至相应的中断发生;发生中断后主程序需要先保存现场,然后执行优先级高的中断子程序,结束后主程序再恢复之前保存的现场。
5 结 语
随着电力电子技术和船舶技术的迅猛发展,种类繁杂数量庞多的高端电力电子设备越来越多地应用在船舶这一重要的交通工具上,通信设备在其中起着监视、控制与管理其他电子设备的目的。而通信电源为通信设备的正常运转提供着必备的能量来源。本文对于船舶上这一至关重要的通信电源,根据其实际的规格,选择了电源的拓扑结构,并基于DSP 控制芯片设计了相应的控制电路,并实施了相应的控制策略,最后给出了DSP 的软件流程图。本文借助于DSP,充分运用现代数字控制技术的优势,极大地缩短了控制方案的设计周期,并大大地提高了通信电源的开发效率。
[1]周琦.电力系统通信电源应用分析[J].电力系统通信,2007(Z1):67 -69,72.ZHOU Qi.Application analysis of communication power supply for electric power system[J].Telecommunications for Electric Power System,2007(Z1):67 -69,72.
[2]刘小虎,张天浩,吴岿华.一种基于DSP 组合式中频逆变电源的设计[J].舰船科学技术,2011,33(12):79-81.LIU Xiao-hu,ZHANG Tian-hao,WU Kui-hua.Design of combined medium frequency power inverter supply based on DSP[J].Ship Science and Technology,2011,33(12):79-81.
[3]喻寿益,杨柳,陈宁.Boost 型电路双闭环功率因数校正控制策略[J].控制工程,2013,20(1):18 -21.YU Shou-yi,YANG Liu,CHEN Ning.Double loop ontrol strategy for PFC based on boost circuit[J].Control Engineering of China,2013,20(1):18 -21.
[4]曹冬华,刘金林,曾凡明.数字化设计技术在舰船动力装置生命周期中的应用[J].舰船科学技术,2012,34s(11):159 -164.CAO Dong-hua,LIU Jin-lin,ZENG Fan-ming.Research on application of the digital design technology to the lifecycle of the marine power plant[J].Ship Science and Technology,2012,34(11):159 -164.
[5]张文铎,邱瑞昌,赵晓红.基于DSP 的中频逆变电源设计[J].电力电子技术,2010(4):56 -58.ZHANG Wen-duo,QIU Rui-chang,ZHAO Xiao-hong.Design of medium frequency power inverter supply based on DSP[J].Power Electronics,2010(4):56 -58.
