基于背景差分的高速公路运动目标检测算法*
2015-12-19符锌砂王祥波李海峰孟庆昕
符锌砂 王祥波 李海峰 孟庆昕
(1.华南理工大学 土木与交通学院,广东 广州510640;2.中南大学 土木工程学院,湖南 长沙410075;3.中交宇科(北京)空间信息技术有限公司,北京100101)
如何快速、有效、准确地获取交通对象是高速公路视频监控系统的关键.如果能准确检测出高速公路监控环境下的各种运动目标,就可以对所获取的目标进行跟踪,获取跟踪对象的运动参数等信息.从而可以根据所获取对象的几何特征来判断目标是属于哪一种运动物体,例如车辆、非机动车、行人等.同时,也可以对一些异常事件自动报警,如高速公路上的非法停车、交通拥堵缓慢、高速公路出口逆行等常见的事件.
在运动目标检测方面,目前应用较为广泛的有差分法、光流法等.随着研究的深入,近年也出现了一些比背景差分更高级、更准确的运动目标的检测算法,如利用HOG、Gabor、Haar[1-4]等特征,并采用神经网络[1]、SVM[1]、隐马尔科夫模型[5]等分类算法实现运动目标的检测[6].尽管如此,背景差分法作为一种相对旧的运动目标提取算法[7],由于具有较小的计算复杂度,且可以达到较好精度,应用仍然比较广泛.
传统的背景差分算法存在较大局限性,该法最初采用固定阈值,对于高速公路等场景变化较为频繁或者光照影响较强的监控场所来说,准确检测车辆等交通对象就变得非常困难.有很多关于背景差分算法的改进,主要是针对背景模型进行改进,包括时序均值模型[7]、高斯混合模型(GMM)等[8].但是这些算法应用在高速公路监控中的效果都不是很好,很难将灯光变化频繁的场景中的车辆提取出来.因此迫切需要找到另一种改进算法来满足高速公路智能监控的要求.
文中提出一种新的运动目标的检测算法.首先对背景模型进行改进,并通过分析差分图像的灰度直方图,提出一种新的自适应阈值的算法.由于此算法是针对每一帧图像对应的差分图像进行分析,会产生随时间变化的自适应阈值,可以避免使用一个固定值来区分背景和前景所造成的混乱.同时,针对高速公路监控的实际情况,夜间路面及周围物体反光容易形成假目标的问题,文中通过分析差分图像的梯度分布排除这些假目标的干扰.
1 背景差分算法
目前国内外关于背景差分算法的改进主要集中在两个方向:一是背景模型的改进[9-11];二是阈值判断条件的改进[12].
1.1 常用背景模型
文中主要分析两种背景模型,分别是Wren 等[7]提出的时序均值序列模型和高斯混合模型[8].
时序均值背景模型是将每一个像素点在过去n帧的分布看成是独立的,且服从高斯分布.当新的一帧图像需要添加到背景中时,以一个时序平均值来表示,即

式中,μt、μt-1分别为t、t -1 时刻背景图像,It为t 时刻当前帧图像,α 为学习率,其选择决定背景的稳定性和更新的速度,如何选择一个合适的学习率需要通过实验来获得.
高斯混合模型是将某一像素点的颜色变化分为K 个状态,每一个状态都服从高斯分布,而这个像素点的分布则是这K 个高斯分布的加权平均.K 个状态中有一部分是表示背景的,另外一部分表示运动前景.K 值越大,处理波动的能力越强,但是处理的时间也长.在实际应用中K 值范围通常取3、4 或5[8].每个像素点用一个变量xt来表示,其概率密度函数可以表示为

式中,η(xt| μi,t,σi,t)是t 时刻第i 个高斯分布,其均值为μi,t,方差为σi,t,ωi,t是第i 个高斯分布的权重,且有
K 个高斯分布按照ω/σ 降序排列,最前面的表示背景像素值.用当前的像素值xt与K 个高斯模型匹配,当| xt- μi,t| <2.5σi,t时,即认为xt与第i 高斯分布匹配.如果K 个高斯分布都没有匹配的,就将最后一个高斯模型更新.具体更新方法为用xt代替其均值μi,t,将方差σi,t设为一个较大的值,权重ωi,t设为较小的值.如果xt匹配到第r 个高斯分布,且满足

式中,T 是一个标准阈值,每一次判断完成之后都需要对模型进行更新,包括权重ωi,t、均值μi,t和方差σi,t,

即将xt判断为前景目标.
对于匹配的高斯模型,模型匹配参数Mt=1,其余的都为0.当α 的值越大时,高斯混合模型更新就越快,更容易适应图像的变化,但如果取值太大则不能达到背景的效果.
虽然混合高斯模型可以得到很好的效果,但是计算量相对较大,在高速公路监控中,还需要对提取出的运动目标做进一步的分析,要想达到实时的效果,必须在两帧图像的间隔时间(一般是1/25 s)内做完所有的处理计算,对计算量的要求较严格.如果计算量太大,系统将无法获取到由网络传输到系统中的实时监控视频,造成网络丢帧的情况.
1.2 阈值确定算法
由于夜间高速公路监控视野中的光照变化很频繁,采用固定阈值难以得到较好的差分效果,因此考虑采用自适应阈值的算法.下面是两种自适应阈值的算法.
Otsu[12]曾提出过一个基于灰度图像直方图的无监督阈值确定算法.Otsu 按照图像灰度直方图分布进行统计分析,将像素值量化为L 级,每个级的像素点个数为ni,且n1+n2+…+nL=N.则

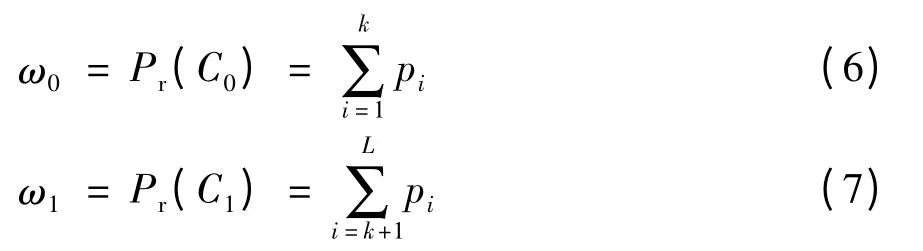
用一个灰度阈值k 将图像中的像素点按照像素值大小分为背景(C0)和前景(C1),像素值小于k的像素点为背景,像素值大于k 的像素点为前景,即运动目标.分别计算某一像素点属于背景和前景的概率,即
再计算两个类的类间方差:

当阈值k 使得σ2B达到最大时,k 即为最佳阈值.
Gupta 等[13]认为当前帧图像与背景差分之后得到的差分图像中,大部分像素点的像素值都较低,这些对应于当前帧中与背景相似的像素点;只有少部分像素值较高,对应的是需要获取的前景目标.差分图像的直方图往往存在两个或多个峰值,要得到较好的阈值需要找到处于最大值右侧的一个低谷,并以此作为阈值.直接从直方图中找到这个低谷比较难,有时候也不一定存在明显的低谷.文献[13]中从直方图中的最高峰所对应的像素值开始往右开始搜索,当某一像素值的像素点个数小于峰值到一定程度(10%)时,即将此像素值作为阈值.每一帧图像进行差分之后,都需要进行上述分析对阈值更新.
1.3 其他目标检测算法
文献[14-15]中提出了一种新的思路,认为当前的背景差分大多都只是针对某一固定的图像特征进行描述分析,在不同的复杂环境下鲁棒性往往都很差.因此提出了建立一个背景特征库的思想,利用一种智能算法筛选几种较为明显的特征使得背景和前景的差异性达到最大.尽管这种背景差分方法计算相对复杂,但是其采用多维特征来区分前景和背景的思想很值得借鉴.
2 改进算法
文中研究目的旨在提出一种能够适应各种复杂的高速公路监控环境的目标检测算法,以满足高速公路运行监测的需要.在总结了前人研究的基础上,对时序均值背景的算法进行了改进,并利用直方图统计的思路,提出了一种新的确定自适应阈值的算法.借鉴文献[14-15]中采用多维特征进行判断的思想,对背景差分图像的梯度图像进行分析,利用差分图像的梯度信息辅助二值化过程,避免差分图像中噪声的干扰.算法的具体流程如图1所示.

图1 文中算法流程图Fig.1 Flow chart of the proposed algorithm
2.1 背景模型改进
为了满足实时监测的需求,文中采用的背景模型是在时序均值背景的基础上加以改进实现的.文献[7]中提出的方法是将所有获取的图像按照适当的学习率添加到背景中,对每一帧图像都进行一次背景更新,但是由于学习率不能取得太大,所以将一帧图像按照学习率的方法添加到背景对背景的影响很小,很难达到背景更新的效果.反而每次都更新造成了大量的计算浪费.文中通过改进,采用固定帧数N 的平均值作为背景模型,并在间隔达到一定程度时才进行背景更新.背景模型为

式中,BN表示背景图像.
每隔一定的帧数进行更新,将背景所采用的帧数分成M 份,每份的帧数是N/M 帧.利用一个链表结构将M 份串起来,当距上次背景更新的帧数达到N/M 时,按照先入先出(FIFO)的原则,将这段时间的图像累加的效果添加到背景中进行背景更新.文中采用M=10,即当距上次背景更新间隔达到N/10帧时,对背景进行更新,则

按照式(10)每N/10 帧更新一次背景,每次用来计算背景的图像帧数都是N.如果固定帧数N 取值较好,即可兼顾背景的准确性和适应性.通过实验,文中选择N =2 000,即每200 帧图像更新一次背景.
2.2 自适应阈值算法
利用直方图来确定阈值的算法在文献[12]中最先提出,但由于每次都要计算类间方差,计算量太大,对于要求实时性的系统来说,目标检测完成后需要大量的后处理分析,所以实现起来有些难度.文献[13]中也提出了寻找直方图中的谷底的方法,采用最高峰的一定比例所对应的像素值作为阈值,但实际情况往往不是那么理想,实验中发现这个比例的选取对阈值的确定有很大影响,对于夜间来说很难找到一个确定的比例来计算阈值.同时按照最大峰值10%的比例查找最适合的阈值,每一次计算都会有一部分像素点被识别成目标,而对于视频序列的处理,不一定是每一帧图像中都存在目标.
文中通过对直方图的总体形状分析后得知:当图像中没有目标出现时,差分图像的直方图分布主要集中在像素值较低的区域,且大体呈现高斯对称分布.而当图像中出现目标时,目标区域所对应的差分图像中的像素值主要分布在较高的区域,且整个直方图出现不对称的形状,像素值较高的区域会出现一个尾巴.为此,文中通过计算一个不对称系数来表达图像中是否出现目标,再利用此不对称系数来确定一个阈值以区分背景和目标.
不对称系数的表达式如下:

式中,xmax、xmin、xmost分别表示差分图像直方图中的最大值、最小值以及峰值像素值.为了排除高斯噪声的影响,对于最大值和最小值采用滤掉直方图中像素点个数太小的像素值,文中取直方图中≥10 的像素值来计算.
对于没有目标的时刻t1,差分图像的直方图分布呈现较对称分布,且均值(或峰值)处在像素值较低的区域,此时的不对称系数接近于0;当有目标出现的时刻t2,差分图像的直方图呈现严重的不对称分布,且像素值较高的区域像素点会增加,但峰值依然在像素值较低的区域,此时不均匀系数偏大,如图2所示.
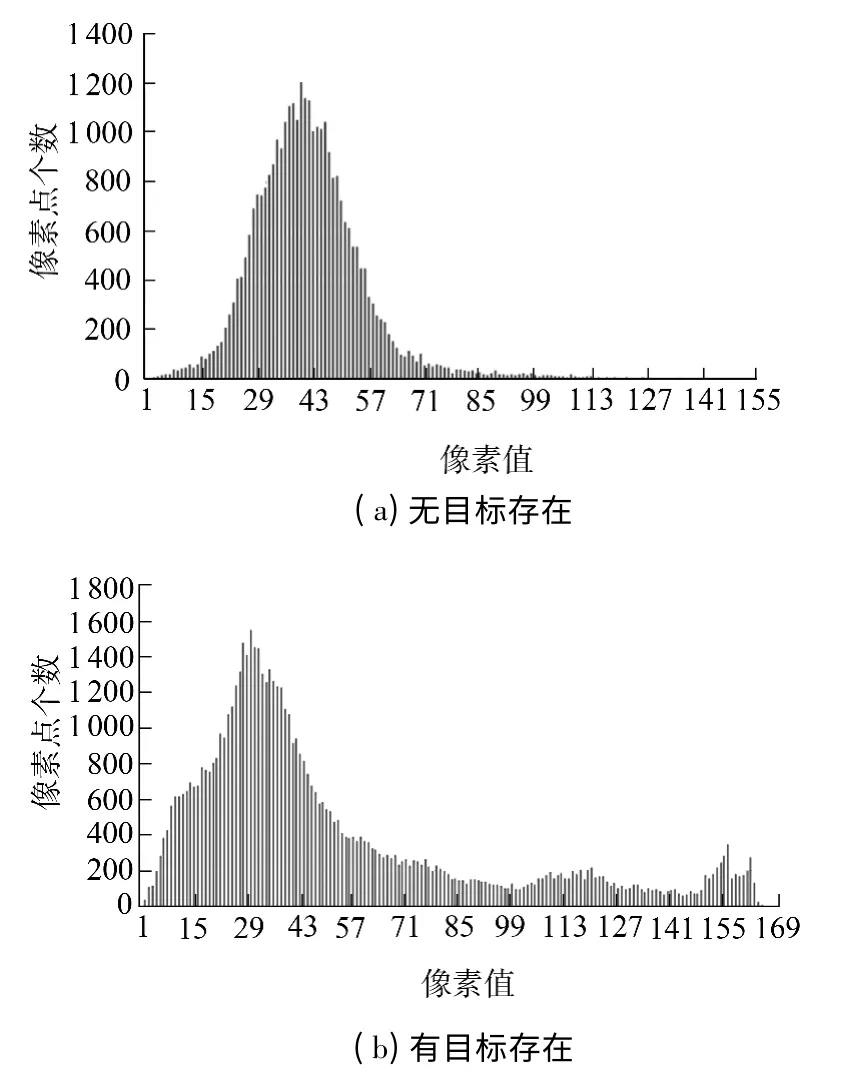
图2 差分图像直方图分布Fig.2 Histogram distribution of differential images
阈值的确定算法为

式中,T 为通过此算法确定的阈值.
2.3 差分图像梯度分析
传统的背景差分都是在RGB 等颜色空间中进行的,并且从应用现状来看,大多数情况都不易出现大的干扰,但是在实验中发现,由于夜间灯光照射以及路面、路旁反光的物体可能会导致假的目标出现.因此,文中加入背景图像与当前图像的梯度差分图像来辅助判断,以消除由于灯光照射到路面等反光物体时造成的假目标的现象.这里的梯度差分图像是指将当前图像与背景图像的某一像素点的梯度相减,并用所得的梯度值来表示与当前像素点对应的像素值.

式中,GT(x,y)表示差分得到的梯度图像的像素值,GB(x,y)、GF(x,y)分别表示背景图像梯度值、当前图像梯度值.
其中,GB(x,y)(或GF(x,y))采用8 邻域的像素值之差的平均值作为该像素点的梯度值.关于图像梯度的计算方法,文中借鉴了边缘检测中常用检测算子的思路,如Sobel[16-17]、Laplacian[17].由于Lapalacian 算子中邻域像素值的权值是-1,有时会产生负数,这在本算法中是不希望见到的,因此文中取绝对值,同时综合考虑计算速度和计算效果,以及各向同性的原则,采用8 邻域均值的方法来表示梯度值:

式中,xi为各像素点的像素值.
由于灯光变化等干扰因素导致的假目标在其范围内的纹理较少,而真实的目标范围内纹理较为明显,文中提出的上述像素梯度值辅助目标检测方法可以排除这种假目标的影响.同时,通过对差分图像的梯度分布进行分析,可以发现大部分的梯度值都处于较低的水平,只是在有目标的区域内才有较高的梯度值.因此,可以据此设定梯度图像的阈值,以此来判断目标像素点.
图3是计算梯度值时所采用的8 邻域的示意图,0 表示所计算的像素点,1 -8 表示像素点0 的8个相邻像素点.
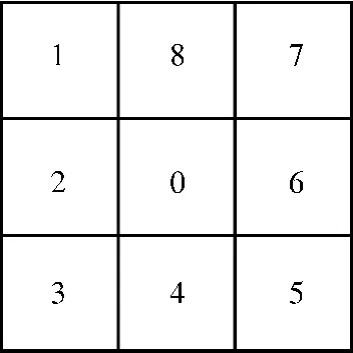
图3 8 邻域示意图Fig.3 Schematic diagram of 8-neighborhood
3 实验验证
利用某高速公路的3 种不同环境的监控视频检验算法的效果,即夜间灯光变化较频繁的监控环境、白天逆光的监控环境以及雨天路面积水的监控环境.夜间灯光变化频繁容易导致目标丢失;而白天逆光条件下摄像机视野的亮度相对较暗,在差分图像中目标与背景的差异性相对于其他环境较小;雨天路面积水导致反光容易形成假目标.采用传统的目标识别算法对这3 种环境条件下的目标检测比较困难.实验结果表明,文中提出的算法能够在这些复杂环境下进行准确检测.
为了减少计算量,同时也能提高检测的准确性,避免不必要的干扰,文中在进行图像差分计算时,只分析路面范围内的图像变化.将文中提出的算法与固定二值化阈值的算法在不同的检测环境下进行对比,对比算法没有利用梯度差分的图像.
图4(a)-4(c)分别为固定阈值算法与文中提出的算法在夜间环境、逆光环境及雨天环境的对比效果.图中第1 行表示固定阈值算法的效果;第2 行为本文提出的算法的效果.
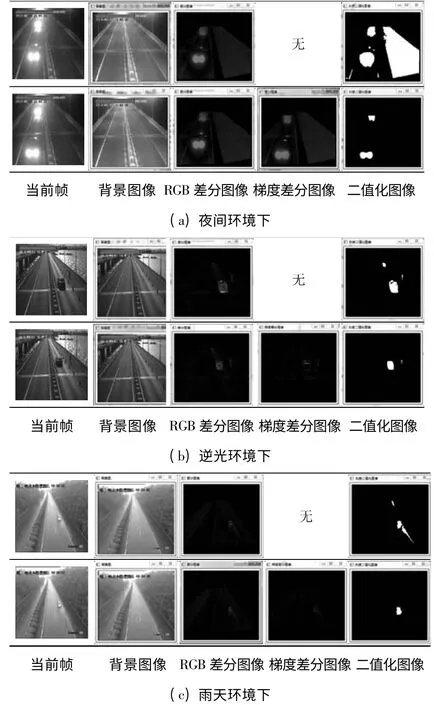
图4 3 种环境下的检测效果图Fig.4 Detection results in three environments
实验结果显示,由于夜间车辆灯光的影响会导致反向车道区域的亮度变暗,采用原始的固定阈值的算法会导致二值化的结果较差,但利用文中的算法计算即可较为准确地将车辆的前大灯区域识别出来,并以此表示运动车辆,如图4(a)所示.
白天逆光条件下,路面会有一定的反光导致路面像素点的亮度偏大,如图4(b)所示,固定阈值的算法容易将路面亮度值较大的点检测为目标,而且在视频播放时,这些假目标可以长期稳定的存在,严重影响检测效果.利用文中的算法则可以很好地将图像中的车辆和行人检测出来.
雨天环境下,路面积水会产生反光及车尾产生的水花会对目标识别产生干扰.文中提出的算法可以有效避免检测到路面上由于积水反光产生的假目标,同时也很好地消除了车尾水花产生的影响.如图4(c)所示,固定阈值在远处产生了假目标,且在车尾的水花处也出现了较差的二值化效果.
4 结论
提出了一种新的背景差分算法,在改进了背景模型的同时,通过分析差分图像的梯度分布,利用统计学的方法计算出一种全新的自适应阈值,然后引入差分图像的梯度值作为辅助特征进行目标检测,大大提高了检测的效果,提高了检测系统的准确性.此算法能够适应不同的高速公路监控环境,能满足高速公路全天候监控的要求,对推动高速公路智能监控系统的建设具有理论和现实意义.
[1]Sun Z,Bebis G,Miller R.Monocular precrash vehicle detection:features and classifiers[J].IEEE Transactions on Image Processing,2006,15(7):2019-2034.
[2]Sivaraman S,Trivedi M M.A general active-learning framework for on-road vehicle recognition and tracking[J].IEEE Transactions on Intelligent Transportation Systems,2010,11(2):267-276.
[3]Yuan Q,Thangali A,Ablavsky V,et al.Learning a family of detectors via multiplicative kernels[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2011,33(3):514-530.
[4]Chang W C,Cho C W.Online boosting for vehicle detection[J].IEEE Transactions on Systems,Man,and Cybernetics,Part B:Cybernetics,2010,40(3):892-902.
[5]Jazayeri A,Cai H,Zheng J Y,et al.Vehicle detection and tracking in car video based on motion model[J].IEEE Transactions on Intelligent Transportation Systems,2011,12(2):583-595.
[6]Sivaraman S,Trivedi M M.Looking at vehicles on the road:a survey of vision-based vehicle detection,tracking,and behavior analysis[J].IEEE Transactions on Intelligent Transportation Systems,2013,14(4):1773-1795.
[7]Wren C R,Azarbayejani A,Darrell T,et al.Pfinder:realtime tracking of the human body[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1997,19(7):780-785.
[8]Stauffer C,Grimson W E L.Adaptive background mixture models for real-time tracking[J].Proceedings of Computer Vision and Pattern Recognition,1999,2:2246.
[9]Piccardi M.Background subtraction techniques:a review[J].IEEE International Conference on Systems,Man and Cybernetics,2004,4:3099-3104.
[10]Halevi G,Weinshall D.Motion of disturbances:detection and tracking of multi-body non-rigid motion [J].Machine Vision and Applications,1999,11(3):122-137.
[11]张恒,胡文龙,丁赤飚.一种自适应学习的混合高斯模型视频目标检测算法[J].中国图象图形学报,2010,15(4):631-636.Zhang Heng,Hu Wen-long,Ding Chi-biao.Adaptive learning Gaussian mixture models for video target detection[J].Journal of Image and Graphics,2010,15(4):631-636.
[12]Otsu N.A threshold selection method from gray-level histograms[J].Automatica,1975,11:285-296.
[13]Gupte S,Masoud O,Martin R F K,et al.Detection and classification of vehicles[J].IEEE Transactions on Intelligent Transportation Systems,2002,3(1):37-47.
[14]Collins R T,Liu Y,Leordeanu M.Online selection of discriminative tracking features[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2005,27(10):1631-1643.
[15]Parag T,Elgammal A,Mittal A.A framework for feature selection for background subtraction[C]∥2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition.[S.l.]:IEEE,2006:1916-1923.
[16]Heath M D,Sarkar S,Society I C,et al.A robust visual method for assessing the relative performance of edge-detection algorithms [J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1997,19(12):1338-1359.
[17]Nixon M S,Aguado A S.Feature extraction and image processing[M].Singapore:Elsevier,2010:137-139.