雷达阵地三维数字化系统的设计与实现
——基于国产三维激光扫描仪的雷达阵地快速勘测应用
2015-12-16李光伟才长帅
李光伟,曹 原,才长帅
(空军装备研究院雷达与电子对抗研究所,北京,100085)
雷达阵地三维数字化系统的设计与实现
——基于国产三维激光扫描仪的雷达阵地快速勘测应用
李光伟,曹 原,才长帅
(空军装备研究院雷达与电子对抗研究所,北京,100085)
雷达装备性能的发挥常常受制于雷达阵地周围地理环境,因而根据地理环境合理选择雷达阵地架设点是充分发挥雷达系统性能和有效遂行战斗任务的重要前提。雷达阵地三维数字化系统以基于国产三维激光扫描仪所获取的地形数据为基础,构建三维高程地形模型,可以有效地计算雷达架设点的遮蔽数据以及断面数据,从而为精确、快速地勘选雷达阵地提供重要的辅助作用。
雷达阵地勘选;三维激光扫描;点云数据
0 引言
三维激光扫描仪作为一种新型的非接触式海量高精度数据获取手段,在国内外已经得到了广泛的应用。点云数据的后处理也成为目前应用研究的热点,尤其在三维几何建模中的地位十分重要。目前,国内在文物保护、变形监测、数字城市等领域对三维激光扫描技术的应用比较成熟,但在雷达阵地快速勘选方面的应用还处于研究阶段。商用点云数据处理软件,包括Geomagic、Polyworks、Imageware等虽然已获得较为广泛的应用,但这些软件在处理大面积复杂地形数据时,计算效率非常低。
影响雷达阵地勘选的因素多且复杂,可以归纳为阵地地形条件、雷达工作环境、人员生存环境、雷达战术性能等因素,地形因素又包括雷达反射面、地形遮蔽角、道路状况等子因素。雷达装备性能的发挥受地形条件的影响明显,传统的阵地勘选方法是人工实地勘测,主要缺点是费时费力。但是为了保证所架设雷达系统的探测性能,就必须对周边地形起伏进行详细勘测。在精细勘测基础上,合理选择雷达系统架设位置,并对使用过程中阵地的变化情况严密监测,这是保证雷达系统有效遂行战斗任务的重要前提,同时合理选择雷达系统架设位置更能精确、高效地发挥雷达阵地侦察、预警、作战的整体威力。三维激光扫描仪快速精确获取的地形数据在雷达阵地勘测中具有重要的参考作用,然而这些地形数据并不能直接辅助雷达架设地点的选取,需要对点云数据进行后处理,在完成地形的三维建模基础上,再对相关数据进行分析。
雷达阵地三维数字化系统,是基于国产三维激光扫描仪所获取的m范围内的地形数据和高分辨率相机获取的雷达阵地平面图形数据,实现点云数据预处理、阵地数字地表模型的自动生成以及天际线自动设别等功能;进而根据近区遮蔽数据、中距离遮蔽数据、远区遮蔽数据,计算雷达阵地的遮蔽数据、断面数据和探测威力;从而为雷达架设点精确快速勘选创造条件,确保所架设雷达的实际探测性能。
1 系统原理及功能模块
1.1 工作原理
本系统工作原理如图1所示。
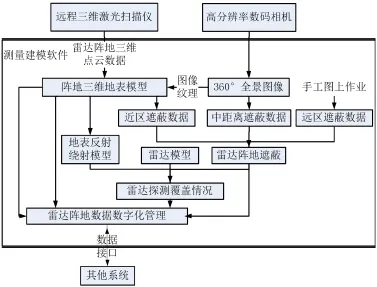
图 1 系统工作原理图
雷达阵地三维数字化系统的主要工作步骤包括:以远程三维激光扫描仪对m内的雷达阵地进行扫描,获得阵地三维点云数据;再经点云数据预处理获得阵地的三维地表模型;根据阵地三维地表模型,计算雷达阵地近区遮蔽角,根据阵地全景图像,计算中距离遮蔽角,从而根据战区地图,计算远区遮蔽角,综合雷达阵地近区、中距离和远区遮蔽数据,得到雷达阵地遮蔽角;建立雷达模型、地面反射/绕射模型,根据阵地三维地表模型和雷达阵地遮蔽,计算不同型号雷达在阵地上的遮蔽、地面反射/绕射和雷达波瓣分裂情况,计算雷达探测覆盖范围;最终给出雷达阵地选择和雷达装备架设决策建议。
此外,雷达阵地数据数字化管理可将所有在用和备用雷达阵地的三维地形数据,经数据压缩和分类处理后存入雷达阵地数据库,为使用者提供雷达阵地地形的统计和查询;建立与装备仿真系统的数据接口,提供雷达阵地三维地形数据及雷达探测覆盖计算结果。
1.2 功能模块
雷达阵地三维数字化系统软件包括人机交互软件模块、点云数据预处理软件模块、三维建模软件模块、电波仿真软件模块、阵地数据管理软件模块和数据接口模块等,各模块间信息流程见图2。各模块主要功能如下:
1) 人机交互软件模块
人机交互软件模块提供人机交互界面,完成三维激光扫描仪设备状态设置、控制、点云数据采集以及与其它软件模块的交互等。
2) 点云数据预处理软件模块
数据预处理内容包括点云颜色匹配、去噪平滑、简化以及配准。点云数据去噪是采用数字图像各种滤波方法去除超出阈值的噪声点,并尽量保留数据的边缘和细节,常见的算法有局部平滑法、中值滤波法、拉普拉斯法等。点云数据简化采用内等距采样法、距离阈值法、曲率阈值法。此外,采用改进的就近点搜索法(iterative closest point, ICP)算法实现原始点云三维图像的高精度配准。
3) 点云数据三维模型重建软件模块
模型重建模块实现三角网格模型建立、点云分割、模型适配、模型编辑和纹理匹配等功能,从而重建出一个真实的三维模型。其中,点云数据分割采用基于格网聚类分割方法,模型适配通过执行PCL适配算法实现雷达阵地、植被、房屋建筑、雷达天线罩等模型的自动识别和表面重建。
4) 雷达阵地遮蔽模型
雷达阵地遮蔽由近区遮蔽、中距离遮蔽和远区遮蔽共同构成。
5) 雷达模型
建立包括所有现役雷达模型的数据库,每型雷达基本参数包括频率、功率、信号形式、水平波瓣图和垂直波瓣图等。
6) 电波反射、绕射模型
根据设置的雷达参数建立雷达模型,根据三维地表模型计算地面反射系数,此系数为平滑表面的反射系数、地球曲率引起的发散因子、表面粗糙度和表面植被因子的乘积。引入方向图传播因子,并将多径效应对雷达探测距离的影响折算到方向图传播因子中,从而计算阵地反射作用下雷达的实际探测距离。
7) 雷达探测覆盖模型
根据设置的雷达参数和阵地遮蔽情况,考虑雷达波直线传播方式,计算雷达波覆盖情况。
2 系统实现及应用

图 2 雷达阵地测量建模平台信息流程图
2.1 系统及算法实现
系统主框架采用开源三维点云处理软件包Cloudcompare,用Visual C++6.0集成软件和OpenGL技术编制而成,通过Microsoft visual studio 2010驱动MYSQL数据库与软件展示界面的连接。图3为系统的人机交互界面。

图 3 系统主界面
系统采用高斯权重插值法进行阵地点云数据的DEM表面建模。设为分析区内网格点的要素值,为各点行列序号,为测站实测要素值(为测站序号),则插值公式为:
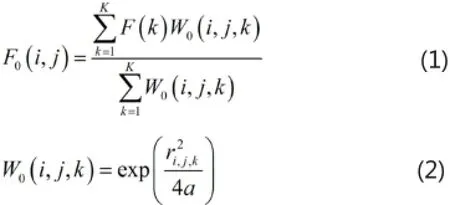
其中,是格点到测站之间的距离;为分析区和影响区半径内的测站总数;为常数。对于平缓地势的阵地地形,基于规则格网的高斯权重插值法效果很好,如图4,但对于有着陡峭斜坡或大量断裂线的地形形态比较破碎的地区,系统需要通过增加特征点、线和加大密度等进行优化。
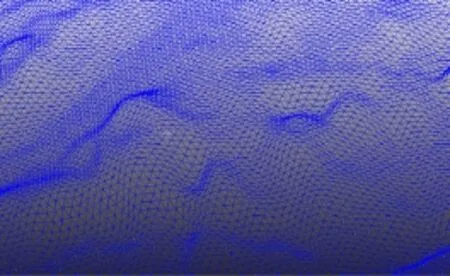
图 4 规则格网DEM及三角网格
雷达遮蔽角是指障碍物顶点和雷达站天线之间的连线与地平线之间的夹角。由于大气是非均匀媒质,电波在大气中传播会发生折射,所以电波射线会向下弯曲。根据雷达原理,在标准大气条件下,大气随高度变化对电波射线的折射率为/m,若地球平均半径取km,地球等效半径取km,可得雷达能探测到航空器高度的计算公式为:

其中:(km)为航空器海拔高度与雷达天线海拔高度之差;(km)为雷达站天线至航空器的斜距;(度)为雷达电波射线的仰角;(km)为雷达站天线到障碍物的水平距离。
根据式(3),田传江等论证了雷达遮蔽角(度)计算公式:

其中:(km)为障碍物海拔高度与雷达天线海拔高度之差;(km)为雷达站天线至障碍物顶点的斜距。
雷达探测范围内各个方向上的最大雷达遮蔽角,以及受遮蔽角影响形成的雷达探测盲区,是雷达阵地架设中需要考虑两个重要因素。如图 5所示,遮蔽部分的长度为

其中:分别为可视部分的长度;为建筑物高度;为建筑物所在位置地面高度;为中间障碍物高度;为中间障碍物地面高度;o和分别为观察者身高和所在位置地面高度。

图 5 雷达遮蔽角示意图
由式(4)和式(5)可得系统在任意方向上的最大俯仰角为

雷达阵地遮蔽角计算软件界面如图 6所示。

图 6 计算阵地遮蔽角软件界面
3 应用实例
根据阵地远距离测量需要,实测案例中选用的是国产脉冲式远程三维激光扫描仪设备,量程达到1200m(反射率为20%)。对某雷达阵地进行了扫描测试,共架设了5个测试点,2个测试点即完成全阵地扫描,其余3个测试点主要用于补盲。每站测量时间5分钟,使用中等点密度模式,100m处点云间隔30mm,距离精度4mm。共采集点云有效数据19,213,721点。经点云数据预处理、三维模型重建后,获得雷达阵地200m范围内精密模型。
图 7为雷达站原始点云数据,箭头所指点云数据距离测量点50m,放大后测量,点云间隔0.028m。

图 7 雷达站原始点云数据
点云数据处理过程如图 8所示,其中图 8(a)的点云数据只显示地形和树木,营房、雷达等人工物体已被手动剔除,且部分深蓝色区域是由于数码相机拍摄时曝光过度导致的颜色失真。从图8(b)和图 8(c)可以看出利用三维数据构建阵地模型的实际效果。

图 8 点云数据处理过程:(a) 颜色匹配后点云数据;(b) 建模后阵地地表数据模型(颜色表示海拔高程,由蓝到红表示由低到高);(c) 阵地等高线模型(示意图,非真实高程)。
4 结束语
雷达阵地三维数字化系统大大加快了雷达阵地数字化进程,提高了雷达阵地测量速度和精度,为雷达阵地架设点勘选提供了重要的决策依据,为装备性能发挥提供了数据支持,为雷达装备阵地优化提供了依据,为增强雷达阵地数据管理能力创造了条件。
[1] 钱建国,赵军武,唐为刚,张家根.三维激光扫描仪获取的数据处理与应用研究[J].矿山测量,2009,(6):44-46.
[2] 李子坡,李晓静.三维激光扫描仪在地形测量中的应用[J].科技与企业,2013,(22):249-250.
[3] 杨永林.我首次应用激光扫描保护大型文物遗址[N].人民日报,2006,4(5):10.
[4] 刘旭春,丁延辉.三维激光扫描技术在古建筑保护中的应用[J].测绘工程,2006,15 (1):48-49.
[5] 高宁,高彩云,吴良才.关于BP神经网络转换GPS高程的若干问题[J].测绘工程,2006,15(3):67-69.
[6] 张德丰.MATLAB神经网络应用设计[M].北京:机械工业出版社,2009:191-196.
[7] 李杰,周兴华,唐秋华,李君益,厉峰.三维激光扫描技术在数字城市中的应用[J].海岸工程,2011,30(3):28-33.
[8] 罗倩.三维激光扫描技术在数字校园中的应用[J].河南科技月刊,2014,(1):30-31.
[9] 杨建军,陈良,陈元喜.结合 GIS与模糊评价法的快速选择雷达阵地方法[J].空军雷达学院学报,2011,25(1):28-30.
[10] 首照宇,陈用昌.影响雷达阵地选择的因素权系数研究[J].微计算机信息,2006,22(34):274-275.
[11] 王京武,李由.基于开源技术的军用软件研发方法探讨[C].2006军事电子信息学术会议文集:1030-1033.
[12] 王中杰,李侠,李芳.基于DEM的雷达阵地选择辅助决策系统设计[J].空军雷达学院学报,2004,18(4):18-20.
[13] 杨昌军,陈渭民,罗玲,周锁铨.高斯权重法在温度场插值中的应用研究[J].大气科学学报,2004,27(5):606-614.
[14] Suoquan Zhou, Cui Zhang, Xi Wu. Coupling Experiment of Regional Climate Model with River Flow Routing Model [A].International conference of GIS and remote sensing in hydrology water resources and environment.Yichang, China,Sep.2003.
[15] 田传江,刘继军.对确定空管二次雷达遮蔽角方法的探讨[J].机场建设,2004,(2):15-18.
李光伟,男,空军装备研究院雷达与电子对抗研究所
Design and Realization of Three-Dimensional Digital System for Radar Position——An application of rapid survey for radar positions based on domestic three-dimensional laser scanners
Li Guangwei,Cao Yuan,Cai Changshuai
(Radar and Electronic Countermeasure Research Institute,Air Force Equipment Research Academy,Beijing,100085)
The performance of aradar system is usually affected by its surrounding geographical environment. Radar position selection is therefore an essential prerequisite for fully exerting the effect of the radar and efficiently carrying out combat missions.Based on the terrain data obtained by domestic threedimensional laser scanners,three-dimensional digital system for radar position selection can accurately provide the shadowing area and the cross-section of the terrain.Thus it can support to exactly and rapidly select the radar position.
Radar position selection;three-dimensional laser scanning technology;point cloud
E919
A
