国内微推力测试技术发展现状
2015-12-16刘万龙朱昊伟孙树江刘奎芹
刘万龙,朱昊伟,孙树江,刘奎芹,郑 然
(北京航天试验技术研究所,北京,100074)
0 引言
随着航天技术的不断发展,深空探测航天器以及微小卫星的姿态控制、轨道控制及编队飞行等方面对微推进系统的需求越来越多。通常把推力介于μN~N之间的推力器统称为微型推力器[1-2]。微型推力器在航天和军事领域都有着潜在的应用价值,世界上对微推力器的研究也愈来愈多[3]。据报导目前已有超过110个在轨运行的航天器应用了微推进系统[4]。其中NASA格林研究中心研制的氙离子推力器NSTAR-30被用来作为美国深空一号探测器(DS-1)的主推力器,其比冲3 300 s,推力92 mN[5];2012年11月,中国成功发射实践九号A卫星,首次采用我国研制的电推进系统进行在轨飞行验证,卫星上载有40 mN/3 000 s氙离子推进系统和40 mN/1 600 s霍尔推进系统[4]。
随着这些微推力器的研制和应用,微推力的测量的重要性也日益凸显。国外对微推力的研究起步较早,在上个世纪60年代,美国就开始mN级微推力测量研究[6]。目前国外主要有摆式台架结构[2,7]、扭摆结构[8-9]、双摆结构[9]以及四臂配重结构[10]等。近些年国内在微推力测量领域也有较多研究与应用。本文目的在于介绍目前国内在微推力测量技术方面的研究进展和技术特点。
1 微推力测量的难点
推力是火箭发动机的一个重要工作参数,直接反映了发动机的性能指标[11],对其精确测量有十分重要的意义。微型推力器推力测量干扰因素很多[6]:
1)介质供应管路及测控电线等会对其测量有较大影响;
2)当微型推力器工作时,推力器产生的气流 (或离子流)会使周围的气流环境发生扰动,从而影响推力的测量;
3)针对特定的电推进系统 (如电弧推力器),电磁力和气动力的交互作用将会对试验结果产生很大影响。
2 国内几种典型测量模式
微推力测量的实质是通过测量在微推力作用下推力台架的响应,从而间接地测量推力。微推力测量的关键是对力本身或力的作用效果进行有效放大,从而保证测量装置有较高灵敏度,同时选用高精度测量元件对力的作用效果进行测量。由于摩擦力会影响测量精度,设计推力测量装置时,各个部件之间要尽量选择无摩擦的连接形式;另外要尽可能减小介质供应管路和测控电线所带来的附加力。下面对国内常用的几种典型测量模式进行介绍和分析。
2.1 直接测量模式
2004年清华大学沈岩等人在进行低功率水电弧推力器的实验时,为微推力测量设计了一套低成本的测力装置[12]。其测量原理图如图1所示。

图1 直接测量模式Fig.1 Direct measurement mode
其主体由电子秤和推力器支架构成,推力器支架固定在电子秤上,电弧推力器固定在支架上,推进剂通过一个内径1 mm的软管输入到推力器中,从而减小管道应力对测量带来的影响。在电子秤上直接读出推力,也可将电子秤的数据输出至计算机上进一步处理。
2008年中科院力学研究所李腾、潘文霞等人设计制作了采用悬臂梁结构的微推力测试架[13]。整个推力架的设计如图2所示:推力器和轴承组固联在一起,可在导轨上滑动,推力器产生的推力作用在与基座连接的悬臂梁上,悬臂梁的变形由力传感器测量。

图2 推力架结构示意图Fig.2 Structure diagram of thrust frame
2009年中国科学技术大学热科学与能源工程系采用德国Sartorius Genius系列IvIE215S型电子秤进行微推力测试[14]。通过测量推力器喷出气流对电子天平的冲击力来测量推力。
通过普通应变传感器或者电子秤来直接测量微推力的方式精度不高,通常只是在对微推力器进行定性的机理研究时使用,当进行深入研究时,需要选用精度更高的测量方式。
2.2 杠杆放大模式
2008年,中国科学院广州能源研究所研制了一种杠杆放大测力装置[15],其推力器芯片固定于杠杆的端部,芯片的对称中心轴处于铅直状态,喷嘴竖直向上喷气,以保证微推力方向与重力方向一致。芯片通过硅胶软管与气瓶连接。推力器芯片产生的推力经杠杆放大,由位于杠杆另一端距离支点仅5 mm左右的压电晶体传感器测量。这种模式受限于压电晶体的测量精度,温漂和时漂较大,也只适合于微推力器的初始研究。
2.3 电磁天平模式
1999年,北京航天计量测试技术研究所赵宝瑞、李晶等人设计研制了一台电磁天平模式微推力测量装置,量程为10~1 000 mN。同年他们设计了其改进型,量程为5~100 mN[16-17]。电磁天平结构原理如图3所示。调整平衡装置D1,D2及D3使天平梁系统的质心与天平中刀O(天平梁支撑点)重合,天平梁系统自重对天平中刀O的力矩为零,消除了电火箭自重对推力的影响,天平工作在随遇平衡状态。利用力矩器电磁反馈补偿微推力器推力,通过砝码标定力矩器的输出电流。试验时通过测量力矩器的输出电流,可以测量出小的推力。

图3 电磁天平结构原理Fig.3 Principle diagram of electromagnetic balance
2000年左右,上海空间推进研究所在进行稳态等离子体推力器研究时,推力测量也采用电磁天平模式[18]。2008年国防科技大学航天与材料工程学院与北京航天计量测试技术研究所合作,基于电磁天平模式,研制了脉冲等离子体推力器(PPT)微推力测量装置[19]。
电磁天平模式的微推力测量装置将推力器及其附件的重量预先平衡,再由测量元件产生相应的平衡力来平衡推力器产生的微推力。这种模式结构简单精度较高,但对推力器质量变化敏感,而且平衡不易稳定。
2.4 扭摆模式
2009年装备指挥技术学院采用扭摆[20]测量激光烧蚀微推力器推力。图4是其采用的测量装置原理图。使用配重平衡推力器重量,使用油池进行阻尼。采用激光干涉法测量[21]测量扭摆的偏转。测量系统主要由2部分组成:激光干涉分系统和冲击摆分系统。激光干涉分系统由He-Ne激光器、分光镜、角耦反射镜、光电二极管以及数据采集系统 (示波器)组成。冲击摆分系统用来标定。
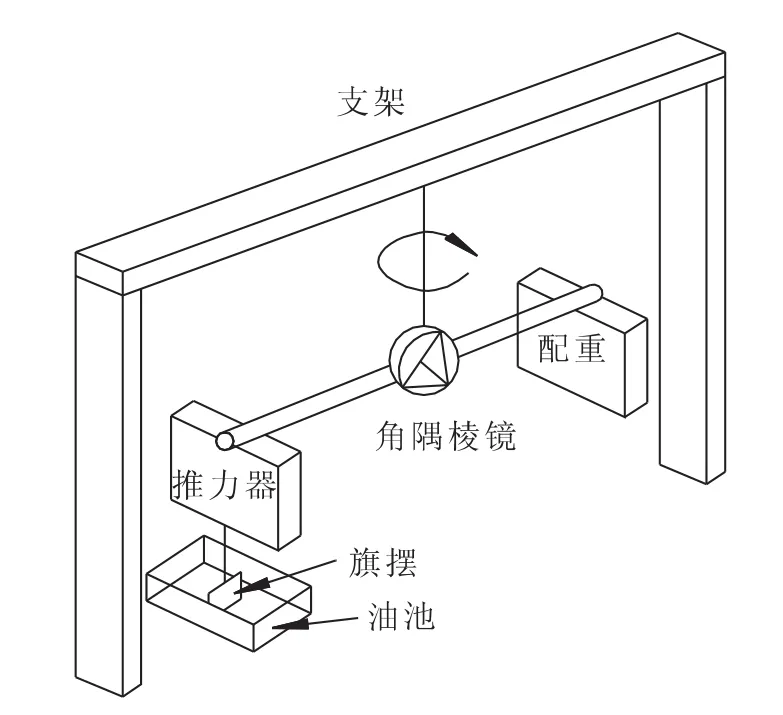
图4 单丝扭摆测量原理图Fig.4 Principle diagram of monofilament torsional pendulum
2012年哈尔滨工业大学能源科学与工程学院设计了一种三丝扭摆式微推力测量系统[22],它采用扭矩平衡和光杠杆放大原理,将推力器的微推力转化为激光光斑的大位移进行测量。其原理图如图5所示,整个扭摆平台被三根丝吊起,利用配重调整平台平衡,并使三根丝受力均匀。发动机工作时,所产生的推力将对平台产生扭转力矩,使其发生偏转。平台上的反射镜会与扭摆一同发生偏转,使激光光斑在标尺上的位置发生移动,移动距离与推力成正比,最后通过换算,就可以得到发动机的推力值。在实际应用中,利用砝码在线标定。

图5 三丝扭摆测量原理图Fig.5 Principle diagram of three-yarn torsional pendulum
近年上海空间推进研究所从俄罗斯进口了型号为SFMS-100的推力架[23],用于霍尔推力器的性能测试。它由测量摆杆、位移电容传感器、同相干扰传感器、交流放大器、解调器、主电压和支持电压发生器、正比控制器、微分控制器、积分控制器、力补偿器、力补偿器磁铁、调零装置、标定装置及采集器等部分组成。工作原理:采用一阶伺服比例-积分-微分控制的基本控制原理,通过电磁补偿器提供反馈力来平衡推力器工作时产生的推力,然后将采集到的电磁补偿信号与标准力值进行比对达到测量推力的目的。SFMS-100装置主要特点:1)推力测量动架采用了4点悬挂方案(2点为摆杆悬挂,2点为细金属丝悬挂);2)通过特殊机构,有效地克服了推力器电缆、气管等对小推力测量的干扰,保证了推力测量的准确性,其量程为1~1 000 mN。
这种扭摆模式采用光纤等细丝作为悬挂支撑,可以测量较小推力,但是这个结构稳定性有待进一步提高。
2.5 全弹性扭摆模式
北京航空航天大学宇航学院汤海滨等人在原有电磁天平模式微推力测量试验台架研究的基础上,于2007年设计制作了一套全弹性微推力测量试验装置[24]。推力测量范围为0~200 mN,测量精度达到±1%,并成功地在模拟真空环境中测量了N2和N2O冷气微推力器连续工作的推力以及电弧推力器的推力测试。其结构如图6所示。该试验装置动架安装在全弹性无摩擦旋转轴上,转动装置和固定装置的连接部分采用无摩擦的叉形弹簧片连接,可以有效消除外界摩擦。通过配重来调节动架重心。使用电容式位移传感器进行测量,使用砝码及电磁力2种方法进行标定。

图6 全弹性扭摆装置结构图Fig.6 Structure diagram of full elastic torsional pendulum
2012年装备指挥技术学院在原有扭摆测力装置的基础上,研制了一种毫秒脉宽激光烧蚀微推力器推力测量装置[25]。与北京航空航天大学宇航学院的全弹性微推力测量装置类似,其由台体结构,调平机构,配平机构,位移传感器,施力器,磁阻尼器,控制终端。台体结构包括横梁、支撑组件、挠性枢轴以及参考框架。
这种模式是扭摆测量微推力模式的一种新的发展,采用挠性枢轴代替吊丝作为试验装置的支撑,结构稳定性好,这种模式使用全弹性加配重台架结构,用线性可变差分位移传感器测量位移,利用随遇平衡原理及无差电磁力负反馈闭环控制系统测量,采用电磁力及砝码标定;这种模式台架结构容易构造,测试手段先进,价格合理,并且还能保证测试结果具有较好的精度,是一种值得重点发展的微推力测量方式,代表了现在主流的研究方向[26]。
3 结束语
本文简述了国外微推力测量技术进展,分析了微推力测量的难点,并对国内几种典型微推力测量模式:直接测量模式、杠杆放大模式、电磁天平模式、扭摆模式及全弹性模式进行了介绍,并分析了这几种模式的优缺点。综合比较全弹性模式结构稳定性较好,这种模式为全弹性加配重台架结构,用线性可变差分位移传感器测量位移,利用随遇平衡原理及无差电磁力负反馈闭环控制系统测量,采用电磁力及砝码标定;这种模式台架结构容易构造,测试手段先进,价格合理,并且还能保证测试结果具有较好的精度,是一种值得重点发展的微推力测量方式。
[1]MERKOWITZ,S M,MAGHAMI P G SHARMA A,et al.AμNewtonthrust-standforLISA[J].PhysicsReviewLetters,2000,85:2869-2872.
[2]SASOK A,ARAKAWA Y.A high-resolntion thrust stand for ground tests of low-thrust space propulsion devices[J].Review of Science Instrument,1993,64(3):719-723.
[3]刘明侯,孙建威,陈义良,等.微推进器推力测试技术[J].力学与实践,2003,25(3):10-14
[4]陈健,毛威,扈延林,等.我国电推进技术的工程应用和途径[C].北京:第八届中国电推进技术学术研讨会,2012.
[5]张郁.电推进技术的研究应用现状及其发展趋势[J].火箭推进,2005,31(2):27-35.ZHANG Yu.Current status and trend of electric propulsion technology development and application[J].Journal of rocket propulsion,2005,31(2):27-35.
[6]刘向阳,范宁军,李科杰.微型推进器推力测试的现状及发展趋势[J].测控技术,2004,23(5):12-16.
[7]HAAGTW.Thruststandforhigh-powerelectricpropulsion devices[J].The Review of Scientific Instruments,1991,62(5):1186-1191.
[8]MERKOWITZ SM,MAGHAMI PG,SHARMA A,et al.A μN Newton thrust-stand for LISA[J].Phys Rev Lett,2000,85:2869-2872.
[9]HAAG TW.Thrust stand for pulsed plasma thruster[J].ReviewofScientificInstruments,1997,68(5):2060-2067.
[10]HOSKINS WA,WILSON MJ,WILLEY MJ,et al.PPT development efforts at Primex Aerospace Company,AIAA99-2291[R].USA:AIAA,1999.
[11]刘伟亮,吴建军.机电一体化推力测试系统的研制与应用[D].长沙:国防科技大学宇航与材料工程学院,2004.
[12]沈岩.低功率水电弧加热发动机的实验研究[D].北京:清华大学,2004.
[13]李腾,潘文霞,林烈,等.一种电弧加热推进器推力测试架[J].宇航计测技术,2008,28(2):17-20.
[14]姜海,赵平辉.基于多孔介质燃烧的小型推进器实验研究[J].工程热物理学报,2009,30(1):169-172.
[15]岑继文,徐进良.真空环境下微推力测量的研究[J].宇航学报,2008,29(2):621-625.
[16]赵宝瑞,李晶.电火箭微小推力自动测量装置研究[J].导弹与航天运载技术,2000,29(2):40-43.
[17]赵宝瑞,李晶,蒋金伟.微小推力自动测量系统研究[J].宇航计测技术,2000,20(4):31-35.
[18]康小录,汪兆凌,汪南豪.稳态等离子体推力器低功率工作模式实验研究[J].推进技术,2001,22(4):326-328.
[19]杨乐,李殿东.脉冲等离子体推力器实验系统[J].真空,2008,45(4):41-44.
[20]洪延姬,土广宇,窦志国.激光烧蚀微推进器研究进展[J].航空学报,2009,30(9):1555-1563.
[21]方娟,洪延姬,叶继飞,等.激光干涉法在扭摆法测量微冲量中的应用[J].推进技术,2010,31(1):109-122.
[22]宁中喜.三丝扭摆微推力在线测量方法及不确定度分析[J].测控技术,2012,31(5):45-48.
[23]余水琳,康小录.VF-6大型电推进试验设备研制[C].北京:第八届中国电推进技术学术研讨会,2012.
[24]汤海滨,刘畅,向民,等.微推力全弹性测量装置[J].推进技术,2007,28(6):703-706.
[25]周伟静,洪延姬,叶继飞,王广宇.一种毫秒脉宽激光烧蚀微推力器的设计与实现[C].北京:第八届中国电推进技术学术研讨会,2012.
[26]LILLY T C,KETSDEVER A D,PANCOTTI A P,et al.Development of a specific impulse balance for capillary discharge pulsed plasma thrusters[J].Journal of Propulsion and Power,2009,25(3):823-826.
