指向式旋转导向钻井系统角位置测量方法
2015-12-15张程光彭烈新马中国石油集团钻井工程技术研究院北京006中国石油塔里木油田分公司新疆库尔勒84000
张程光彭烈新马 琰(.中国石油集团钻井工程技术研究院,北京 006;.中国石油塔里木油田分公司,新疆库尔勒 84000)
引用格式:张程光,彭烈新,马琰.指向式旋转导向钻井系统角位置测量方法[J].石油钻采工艺,2015,37(5):1-4.
指向式旋转导向钻井系统角位置测量方法
张程光1彭烈新1马 琰2
(1.中国石油集团钻井工程技术研究院,北京 102206;2.中国石油塔里木油田分公司,新疆库尔勒 841000)
引用格式:张程光,彭烈新,马琰.指向式旋转导向钻井系统角位置测量方法[J].石油钻采工艺,2015,37(5):1-4.
摘要:指向式旋转导向工具在国内的研究起步晚,许多技术环节还处于攻关阶段。该系统钻头轴(或偏心轴)与钻铤的相对角位置测量是工具在导向过程中保持工具面相对大地稳定的关键和前提,其精确度和实时性至关重要。在研究指向式旋转导向系统工具结构和工具面测量原理的基础上,对利用旋转变压器的2种角位置测量方法——反正切法和鉴相法进行适用性对比分析,对2种算法进行了仿真,并优选鉴相法开展实验室平台验证。仿真及实验结果证明,在电动机模拟井下转动并受干扰的情况下,鉴相法比反正切法处理后的信号具有更强的稳定性,能够较好地实时跟踪并高精度还原工具偏心轴相对于外部钻铤的转动角度,为钻头轴工具面角的测量、导向控制以及整个工具的研制提供了基础。
关键词:旋转导向钻井;指向式;旋转变压器;角位置测量
旋转导向钻井技术是20世纪90年代发展起来的一项尖端自动化钻井新技术,它能够在钻柱旋转钻进时进行井眼轨道连续和实时导向[1]。与传统的滑动导向钻井相比,旋转导向钻井由于井眼净化效果好、轨道控制精度高、位移延伸能力强,在海洋油气资源勘探开发,以及在陆上复杂油气藏超深井、高难度定向井、丛式井、大位移水平井等特殊工艺井中得到了广泛应用,目前已成为一项主流技术[1-2]。
近年来,国际上陆续推出了推靠式、指向式以及复合式的旋转导向钻井工具,并掌握了该项技术的工程应用和商业化服务市场,取得了明显的经济效益[3-4]。从旋转导向工具的发展和应用效果情况看,指向式和复合式工具种类约占目前商业化工具的70%,相比较推靠式旋转导向系统,它不过于依赖于与井壁的接触,不易受地层岩性影响,名义造斜率能达到15~17(º)/30 m(PowerDrive Archer和AutoTrak Curve),能适应更恶劣的井下工作环境,因此可视为未来旋转导向工具的发展方向[5-8]。
国内从90年代开始关注旋转导向钻井技术的发展和进行理论研究,2000年开始进行推靠式样机研制,目前中国海洋石油公司、胜利油田钻井院、中石油川庆钻探等研究单位已开展现场试验[9]。而对于指向式旋转导向工具,国内虽进行过一些系统性的理论研究[10-12],但由于基础工业等限制,基本上没有进行整体研制,以系统测量与控制为代表的多项关键技术还处于攻关阶段。同时,由于国外技术封锁,国内自主研发可借鉴经验较少,只能在系统工作原理分析的基础上,参考或集成已在其他领域验证过的可靠技术,开展一系列基础性的室内实验研究,形成一套具备在实钻过程中获取较高动态测量精度的角位置测量方法,以满足指向式旋转导向钻井系统对测量仪器的要求。
1 指向式旋转导向钻井系统工作原理及角位置测量
指向式旋转导向工具的导向方式类似于传统的弯壳体导向螺杆钻具。不同的是,在钻铤的内部由伺服电动机通过减速器带动内部偏心轴转动[13],使钻头轴与钻铤轴线形成一固定的倾角(图1)。在导向钻进时,钻头和钻铤正向旋转,钻头轴和偏心轴被驱动以相同的速度反向旋转,使钻头相对于钻铤的固定倾角指向一个预定的方位,保持工具面稳定,达到增斜或降斜破岩的目的,工具最大造斜率8(º)/30 m。稳斜时,钻头与偏心装置间形成转速差,使得钻头与钻铤的固定倾角相对于井眼以一定的速度旋转,总体效果是钻了一段井径略微扩大的直井段。
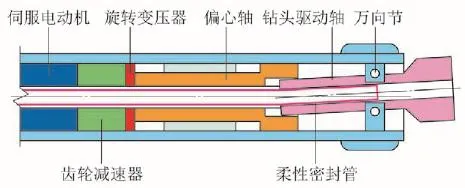
图1 指向式旋转导向工具结构
从以上工作原理不难看出,指向式旋转导向系统工作的基础是对钻头轴工具面角的测量和控制。在地磁场环境下通过建模分析(图2),磁工具面角λ可由以下公式计算
λ=θH-θR-θC(1)
其中 θH=arctan(-Hy/Hz)式中,θH为钻铤基准位置(磁力计y轴方向)到地磁场在钻铤横截面上投影H*方向的转角(图中红色),°;θR为钻铤基准位置到钻头轴指向方向(工具面方向)的转角(图中蓝色),°;θC为校验角,与当地的磁倾角、磁偏角有关,°;Hy、Hz为磁力计y轴、z轴测量分量,t。
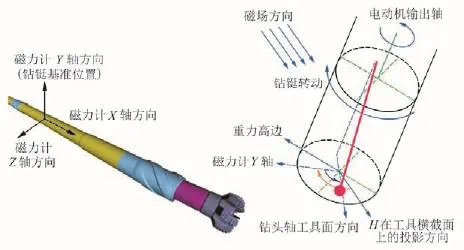
图2 工具面角计算模型
可见,θR的获取是计算工具面角的关键,也是指向式旋转导向工具测量与控制部分的关键环节。需对现有角位置测量方法进行优缺点比较,得出最适合的测量方法。
电动机的定子安装于钻铤本体,转子驱动偏心轴和钻头轴旋转,因此θR可视为电机转子相对于定子的角位置。目前用来检测该类角度的方式按传感器原理的不同主要可以分为磁电式,光电式和感应电机式3类。前2种测量方式算法和处理电路简单直观,但精度不高,传感器制作工艺复杂,抗干扰性差,不宜应用在条件恶劣的场合中。感应电机式角位移测量技术以旋转变压器为代表,内部没有任何电子元件,只有定转子绕组,原理上相当于一个可以转动的变压器,将转子的角位置信息转换为相应的电信号,结构上相当于一个两极两相绕组式异步电动机,结构简单,坚固耐用,受振动、温度、油污等影响较小,性能稳定,较适合在井下环境使用。
2 旋转变压器的角位置测量算法
2.1 反正切法
假定旋转变压器定子激励线圈的输入信号为cos(ω1t+φ1),转子与定子间的夹角为α,则其两路正交的输出线圈信号分别为A1cosαcos(ω1t+φ1)和A2sinαcos(ω1t+φ1),其中A1和A2为两组线圈的耦合系数。又经过前置电路变换为
Y1=U1cosαcos(ω1t+φ1)(2)
Y2=U2sinαcos(ω1t+φ1)(3)
两式相除,得到
Y=(U2/U1)tanα (4)
在理想状态下,旋转变压器2个输出绕组位置正交,参数一致,输出信号前置电路参数也完全一致,则有U2=U1,于是得到角位置α。
反正切算法计算较为简单,不需要专门的芯片,使用一般单片机即可实现。但要求两路输出线圈的严格正交,两路输出信号的前置电路一致性好,否则,将产生较大误差,而且在转子位置90°,270°附近时,微小的转子角度变化会导致较大的正切值的变化,降低了角度测量的精度,需要换算成正弦来计算角度,从而增加了算法的复杂度。
2.2 鉴相法
将Y1、Y2两路信号分别与cosθ、sinθ相乘,得
Y1′=U1cosαcos(ω1t+φ1)sinθ (5)Y2′=U2sinαcos(ω1t+φ1)cosθ (6)
进入差分放大器后的输出信号为
Y= Y1′ – Y2′=U1sin(θ–α)cos(ω1t+φ1)(7)
该信号经过解调,得到误差信号sin(θ–α),用于控制压控振荡器VCO产生数字θ,当sin(θ–α)趋于0时的θ角就是旋转变压器的位置角。闭环算法系统通过自动调整,将总使θ–α趋于0。该算法具有精度高,对两路信号的参数不一致、不敏感(相对反正切法)的优点,但算法复杂,需要专用芯片来计算。

图3 鉴相法算法框图
3 仿真验证
为比较算法的优缺点,分别使用理想调制信号和带有高斯白噪声的调制信号对2种算法进行仿真。图4是采样率为200 K的角度信号,经过频率为10 K的载波信号转化为两路正交的调制信号,分别经过反正切算法和鉴相法计算,得到角度信号见图5;在调制信号中叠加高斯白噪声,再经过反正切算法和鉴相法计算,得到的角度信号见图6。
可以看出,在理想情况下,调制信号没有畸变,也没有受到干扰,使用反正切算法算出的角度与旋转变压器的角度完全吻合,而鉴相法相对原始角度有1个延迟,这是由于图3中的积分器造成的,从图中可以看出,其延迟不大于0.2 ms,该延迟对于井下环境中的工程参数测量及应用完全可以接受。在受干扰情况下,鉴相法解调后的角度与理想情况相比基本无变化,而使用反正切法解调的角度误差很大,因此鉴相法比反正切法抗干扰能力更强。
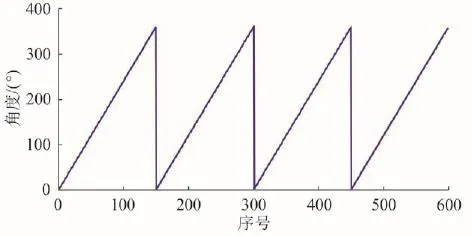
图4 旋转变压器角度
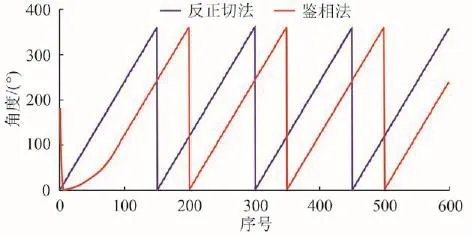
图5 使用反正切法和鉴相法解调理想调制信号角度

图6 使用反正切法和鉴相法解调叠加噪声的调制信号角度
4 实验结果
利用指向式旋转导向模拟台架(图7)对鉴相法算法下的工具角位置测量进行验证。实验台架利用电机模拟钻铤驱动整个装置旋转,钻头轴中的小电机驱动钻头轴朝相反方向旋转,实现模拟井下工作状态(稳斜、增斜)。与钻头轴相连的减速器上装有旋转变压器,通过处理电路测量钻铤相对钻头轴的角位置。设置小电机约以100 r/s的转速匀速转动,旋转变压器的输出信号(图8)进入测量电路,利用鉴相法计算出角位置和钻头转动速度。测量数据见图9。
从旋转变压器的输出信号(图8)看出,由于电机的运行,信号存在较强的噪声干扰。图9中的第1路数据为角度测量数据,呈周期性的锯齿波状,表明控制电机匀速转动;将角度测量数据进行SIN运算,进一步验证了电机的匀速转动(图9第2路数据)。第3路是电机的转动速率,测量结果与设置的转速吻合。整个实验表明了在电机模拟钻铤匀速转动条件下,旋转变压器测量角度正确,电路设计合理,所选取的鉴相算法适用于指向式旋转导向系统角位置测量,抗干扰能力强。
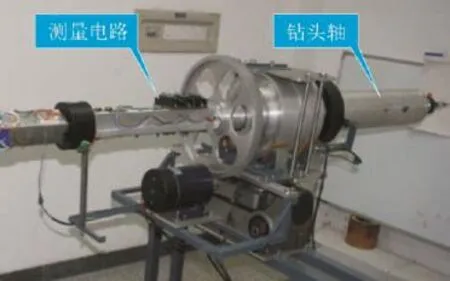
图7 模拟实验台架
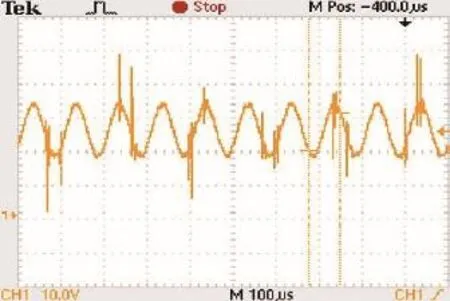
图8 旋转变压器输出信号
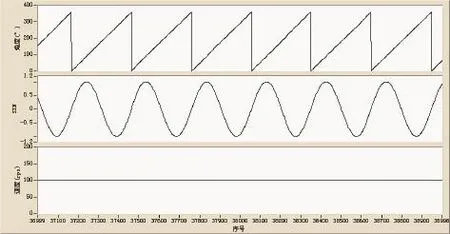
图9 测量电路的输出数据
5 结论
(1)国内对指向式、混合式旋转导向钻井系统的自主研制还处于理论研究和关键技术攻关阶段。
(2)指向式旋转导向系统工作的基础是对钻头轴工具面角的测量和控制,而由数学建模分析可知工具面角的计算关键是对旋转变压器测量角度的处理。仿真结果证明,在理想情况下,旋转变压器反正切法算出的角度与原始角度完全吻合,而鉴相法由于积分会产生一个延迟,该延迟产生影响在系统工作中可以忽略;在干扰情况下,鉴相法比反正切法处理后的信号具有更强的稳定性。
(3)实验室模拟台架测试对电气设计的参数和算法能起到了验证作用。结果证明,在电动机模拟井下转速和干扰的情况下,鉴相法较好地跟踪和还原了工具角位置变化情况,精度高、具有较好的工程实用性,为旋转导向工具的控制提供了基础。
参考文献:
[1] YONEZAWA T, CARGILL E J, GAYNOR T M, et al. Robotic controlled drilling: a new rotary steerable drilling system for the oil and gas industry[R]. IADC/SPE 74458, 2002:1-15.
[2] VON FLATERN R. Rotary steerable′s ready for the mainstream[J]. Offshore Engineer, 2003, 28(4):32-34, 36.
[3] 张程光, 吴千里, 王孝亮, 等. 塔里木油田深井薄油层旋转地质导向钻井技术应用[J]. 石油勘探与开发,2013, 40(6): 747-751.
[4] 王鹏, 盛利民, 窦修荣, 等. 国外旋转导向最新技术进展与发展趋势[J]. 钻采工艺, 2013, 36(6): 32-35.
[5] FELCZAK E, TORRE A. The best of both worlds——a hybrid rotary steerable system[J]. Oilfield Review Winter, 2011(4): 36-44.
[6] ELTAYEB M, HEYDARI M R, NASRUMMINALLAH M, et al. Drilling optimization using new directional drilling technology[R]. SPE 148462, 2011.
[7] 薛启龙, 丁青山, 黄蕾蕾. 旋转导向钻井技术最新进展及发展趋势[J]. 石油机械, 2013, 41(7): 1-6.
[8] 汪海阁, 王灵碧, 纪国栋, 等. 国内外钻完井技术新进展[J]. 石油钻采工艺, 2013,35(5): 1-12.
[9] 蒋世全, 李汉兴, 傅鑫生, 等. 偏心位移控制旋转导向钻井工具研制及关键技术[J]. 石油钻采工艺, 2012,34(S0): 1-4.
[10] 洪迪峰, 唐雪平, 苏义脑, 等. 非连续旋转导向钻具组合的广义纵横弯曲法[J]. 石油学报, 2014, 35(3):543-550.
[11] 杨全进, 蒋海旭, 左信. 一种用于井下钻具旋转中动态方位测量的新方法[J]. 石油钻采工艺, 2014, 36(1): 40-43.
[12] 胡以宝, 狄勤丰, 李汉兴, 等. 带旋转导向工具底部钻具组合的动力学特性分析及参数优化[J]. 石油钻采工艺, 2011, 33(2): 8-11.
[13] TETSUO Y, CARGILL E J, GAYNOR T M, et al. Robotic controlled drilling: a new rotary steerable drilling system for the oil and gas industry[J]. SPE 74458, 2002.
(修改稿收到日期 2015-08-31)
〔编辑 薛改珍〕
Angular position measurement method for directional rotary steerable drilling system
ZHANG Chengguang1, PENG Liexin1, MA Yan2
(1. CNPC Drilling Research Institute, Beijing 102206, China; 2. CNPC Tarim Oilfield Company, Korla 841000, China)
Abstract:The study of directional rotary steerable drilling tool started relatively late in our country and many key parts are still in research stage. The measurement of relative angular position of bit axis (eccentric shaft) and drill collar of the system is the key and prerequisite for drilling tool maintaining a relatively large stable tool face during steering, so its accuracy and instantaneity are very critical. Based on the research on tool structure and tool face measurement principle of directional rotary steerable drilling system, contrastive analysis was conducted to the applicability of arctangent method and phase discrimination method, which are two kinds of angular position measurement methods using resolver. Two corresponding algorithms are simulated and confirmatory tests are carried out for phase discrimination method in lab. The simulation and test results prove that, in the case of simulated downhole motor rotation and interference, phase discrimination method has higher stability in signals treated by arctangent method, and can track in real-time and reduce in high precision the rotation angle of tool eccentric shaft relative to drill collar, providing basis for tool face angle measurement, steering control and development of the entire tool.
Key words:rotary steerable drilling; directional; resolver; angular position measurement
作者简介:张程光,1983年生。2008年毕业于北京理工大学自动化专业,获硕士学位,现主要从事井下随钻测量与控制工具研究,钻井工程师。电话:010-59982670。E-mail:zcgdri@cnpc.com.cn。
基金项目:中国石油天然气集团公司重大科技专项“重大工程关键技术装备研究与应用”(编号:2013E-3801)。
doi:10.13639/j.odpt.2015.05.001
文章编号:1000 – 7393(2015)05 – 0001 – 04
文献标识码:A
中图分类号:TE21
