基于NUFFT的调频步进频高分辨成像与目标识别算法
2015-12-14寅张
向 寅张 凯 胡 程
(北京理工大学雷达技术研究所 北京 100081)
基于NUFFT的调频步进频高分辨成像与目标识别算法
向 寅*张 凯 胡 程
(北京理工大学雷达技术研究所 北京 100081)
雷达自动目标识别技术是发展未来智能化武器系统需首先突破的关键技术。相比于2维SAR图像目标识别,基于高分辨距离像(HRRP)目标识别具有数据维度低、对雷达系统计算量和存储量的要求低和成像算法简单的优点。HRRP成像是目标识别中的前导和关键步骤,其速度和成像结果的质量好坏直接决定了目标识别的实时性和准确性。文中探讨了一种新的HRRP成像算法–非均匀傅里叶变换(NUFFT)算法,推导并给出了用NUFFT进行调频步进信号的回波模拟和高分辨成像的数学公式。同时通过分析成像算法各步骤的计算量,对4种成像算法的计算量进行了对比分析,并仿真了两类地面目标成像与目标识别的结果。理论分析及仿真验证都表明,该文算法的计算复杂度相对于其它算法均有不同程度的改善,可以有效地应用于雷达目标识别中。
雷达自动目标识别;高分辨距离像;调频步进频;高分辨率;非均匀傅里叶变换(NUFFT)
Reference format: Xiang Yin,Zhang Kai,and Hu Cheng. A NUFFT based step-frequency chirp signal high resolution imaging algorithm and target recognition algorithm[J]. Journal of Radars,2015,4(6): 639–647. DOI: 10.12000/JR15083.
1 引言
雷达自动目标识别(Radar Automatic Target Recognition,RATR)技术是指通过获取并分析雷达发射并经过目标反射回来的电磁波特性,从中提取出所包含的目标属性信息,从而自动识别目标的类型、类别[1]。在战场日趋透明的现代信息化战争中,RATR系统可以实现目标类型、真假和属性识别,完成战略预警和战场监视,从而对目标威胁度以及战场全局环境有准确的预判,因此,RATR技术成为现代雷达技术的重要发展方向之一。
基于高分辨距离像(High Resolution Range Profile,HRRP)的目标识别由于其所含目标信息量丰富、对存储量要求低、算法设计简单等优点使其近几年来越来越受到青睐。而调频步进频雷达信号通过发射一系列载频线性跳变的调频信号,将接收回波进行脉内脉冲压缩及脉间IFFT的方法合成高分辨1维距离像,是一种重要的距离向高分辨信号形式。因其具有高的距离分辨率,同时又能大幅度降低信号处理机的带宽需求等优势,因此被广泛用在雷达系统中。
频率步进信号的信号处理算法,也即1维高分辨像成像算法的选择决定了最终1维距离像的成像质量好坏,不同的信号处理算法有着各自的优缺点,目前较常用的高分辨成像算法有3类,分别是目标抽取算法[2–4]、时域合成算法[5]和频域合成算法[6]。它们的计算流程及运算复杂度各不相同,但其共同本质都在于利用匹配滤波的原理得到场景的清晰1维像。本文在此基础上,提出了一种快速匹配滤波1维高分辨像成像算法,利用匹配滤波原理使信噪比达到最优,用FFT快速算法进行计算,并利用Type-II型NUFFT快速算法一步完成从2维回波信号(脉内距离维,脉间频率维)到1维高分辨距离像的脉冲压缩高分辨成像过程,可以获得满意的处理结果。
为满足实时处理需要,较低的算法复杂度是衡量成像算法好坏的重要因素。本文经过仔细分析与仿真验证,论证了本文成像算法可以保证目标上各个散射中心的信噪比,并给出了算法的计算性能分析。
文章的最后采用雷达仿真数据验证了理论分析的正确性。
2 非均匀FFT理论
传统的傅里叶变换(FFT)算法要求输入数据是等间隔采样的,当输入数据非均匀采样时,传统傅里叶变换算法失效。非均匀采样快速傅里叶变换(Non-Uniform Discrete Fourier Transform,NUDFT)[7,8]是解决这一问题的有效手段,NUFFT算法是在非均匀分布的数据域内进行快速计算的一系列方法[9–15]。一类典型的问题是由给定的频域N个非均匀采样点重建对应的时域函数。非均匀傅里叶变换自从诞生以来,已经在很多领域得到应用,应用领域从医学成像、射电天文学到求偏微分方程的数值解。本质上,NUFFT是FFT与插值运算的结合,其理论形式有两种:一种是从非均匀采样的域变到另一个均匀采样域,另一个是其逆过程。在本文中,两次用到NUFFT算法,一是调频步进频雷达回波的模拟,二是1维高分辨成像,因此在本节为简单起见,将简要介绍1-D 情况下的NUFFT算法原理。
传统的DFT算法用数学语言描述如下:

当输入数据在时域和频域的采样点都为N时,式(1)可用快速傅里叶变换算法来实现:
但是,在很多应用场合中数据是不等间隔采样的,通常的FFT算法不再适用。非等间距傅里叶变换(NUDFT)是解决这一问题的有效方法,类似于FFT与DFT的关系,NUFFT是NUDFT的快速算法。它的精度取决于所用的窗函数的类型及长度。在这里我们用到的是Type-II型2-D 逆NUFFT快速算法,它是由非均匀的频域采样数据求解均匀时域采样数据的过程。

大多数NUFFT算法采用过采样技术,由窗函数计算得出,这样在时域和频域都有很好的聚焦特性,因此,式(3)的计算步骤总结如下:
(1) 格网化(插值):

其中,υmk表示插值系数,此步骤需要O(JM)的计算复杂度,J 表示ωm附近的点数;
(2) K点DFT变换:

输出信号xn为前N个信号值,此步骤需要O(Klog2N)的计算复杂度;
(3) 将xn用变标因子进行加权,其中sn是加权因子,“*”表示共轭操作,这样就可以得到时域的均匀采样数据hn。其中,常用到的变标因子有:余弦变标因子高斯变标因子三角变标因子等。
NUFFT总的算法复杂度为O(JM) +O(Klog2N),通常选取K=2N 和J≤10。因此,NUFFT的算法复杂度除了一个常数项外与FFT相差不大,NUFFT算法更详细的细节请参见文献[14]。
3 基于NUFFT的快速匹配滤波成像算法
3.1 调频步进频雷达
调频步进频信号是一系列载波频率等间隔线性跳变的线性调频脉冲串。记单个基带脉冲信号波形为:

其持续时间为T0,调频斜率为K0,带宽B0=K0T0; fn=f0+nΔf,n=0,...,N-1为N个等间隔载频,f0表示起始频率,Δf表示跳频间隔。若脉冲的发射间隔为Tr,则发射信号可以表示为:

假设距离雷达位置为r处存在散射系数为σ0的静止目标,则该目标的雷达回波可以写成:

回波与本振信号混频后得到基带信号为:

如果场景的后向散射系数为σ(r),并把每个发射脉冲对应的回波记成sn(t),则该场景对应的基带回波可以写成积分形式:

3.2 NUFFT高分辨成像算法
调频步进频雷达的回波是时-频域的2维回波信号,其中脉内可看作场景的时域回波信号,脉间是载频线性跳变的频域信号。在将每个子脉冲变换到频域并完成匹配滤波之后,由于两个维度的采样率不同,而最终所成的1维距离像(HRRP)是时域均匀采样信号,因此由2维频域回波数据到1维像的成像过程可以看作是由非均匀的频域数据到均匀时域数据的非均匀傅里叶变换(NUDFT),因此可以由NUFFT快速算法来实现。下面将从回波模拟与成像两个过程介绍NUFFT调频步进频成像算法,两个过程互为共轭。
(1) 步进频回波模拟算子构建
式(7)为步进频回波信号的简单模型,其中积分核函数表征了步进频雷达测量与目标场景后向散射率之间的线性依赖关系可以用线性算子A来表示。下面用NUFFT快速算法来求解式(7)的积分。
首先,对式(7)作傅里叶变换得到频域表达式,


数据处理时通常用离散化来表示,令场景的距离分辨单元大小为Δr,距离像采样坐标为rl=lΔr,l=0,1,...,L-1,σl=σ(rl)。令回波的频域采样间隔为Δfm,频域采样点可写成fm=mΔfm,m=0,1,...,M-1。另记则式(8)的离散形式可表示成:

做如下变量替换:

即回波模拟算子可以利用2维非均匀傅里叶求和式(11)以及NUFFT算法快速实现。
对于静止场景,频率域仍然是均匀采样,因此式(11)所描述的回波模拟算子只是实现了距离均匀采样到快慢时间频率域的快速插值操作。以此为基础,可以扩展出非均匀频率步进,或动目标场景步进频成像的快速成像方法。
(2) 步进频快速成像算子构建
回波模拟算子A的共轭算子AH,可以看做是成像算子,将式(9)进行共轭操作,可以得到场景的后向散射系数,也即目标RCS的计算公式:

从式(12),也即式(9)取共轭运算的结果,可以看到其明显的物理意义。下标为m的项表示每个子脉冲中的脉冲压缩操作,下标为n的项表示脉间的IFFT操作。两项合起来表示调频步进频信号的2维匹配滤波操作。同回波模拟过程相似,令

则线性算子A表示成了2-D NUFFT的形式:

即成像算子可以用式(14)以及NUFFT算法快速实现。
3.3 NUFFT及其计算复杂度
成像信噪比和计算复杂度往往是衡量成像算法好坏的两个重要因素,下面从这两个方面对新算法的性能进行评估。
根据第2节对NUFFT算法计算流程的分析,NUFFT成像方法的计算复杂度是数据维度以及加权函数长度的函数。因此,可以根据场景回波s~nm维度和成像算子的相关参数来评估算法的计算量。本小节将从算法的工作流程切入,对算法计算复杂度各组成部分进行分析。同时,在此基础上,分析比对了新成像算法和传统成像算法的复杂度。
从图1可知,原始回波数据的脉内脉冲压缩是4种算法共有的计算过程,因此为了计算量分析的方便,只比较4种算法其它计算步骤之间计算量的区别。假设雷达回波信号是P个子脉冲的回波,每个子脉冲回波进行N点采样(粗分辨单元)。
(1) NUFFT方法
每个子脉冲内匹配滤波并变换到频域,所需计算量O(PN+PNlog2N);格网化(插值)所需计算量O(JP),其中J=I(p)/p ; K 点IFFT所需计算量O(NKlog2I(p));变标加权所需计算量O(NI(p)+I(p)Nlog2N),总计算量为:

(2) 抽取拼接法
计算量主要在于IFFT步骤,为了快速计算,通常在每个粗分辨单元上做2的整数倍IFFT运算,因此先将每列P个数据补零成为2的整数倍。定义函数I(P),其中若P为2的整数幂;若P为2的非整数幂;也即每列数据补零成I(P)个数据;整个算法的计算复杂度约为:

(3) 时域合成法

图 1 4种算法的计算流程分析Fig. 1 Calculation flowchart of four algorithms

(4) 频域合成法
频域合成算法,各子脉冲做FFT得到频谱以进行频移和相参叠加,所需计算量O(PNlog2N);构造滤波器H(f)进行幅度补偿使各子脉冲的频谱幅度成为理想矩形,所需计算量O(PN);大带宽信号做IFFT得到时域信号,所需计算量总计算量为:

4种方法的计算量分析总结如表1所示。4种算法的计算量均为距离像采样点数(N)和脉冲数(P)的函数,令距离向采样点数在N=64~512,脉冲数在P=100~500之间变化,绘出其与计算量的函数关系曲线,如图2所示。在NUFFT算法中,通常取K=2N,J≤10,在本文的应用中,K为比子脉冲数P大的2的整数次幂,即K=I(p)。
上述实验结果表明计算量受数据维度的影响,而且随着数据维度的增加成指数函数增加。在4种算法中,NUFFT、抽取拼接、频域合成算法的计算量相当,均在107量级,时域合成算法的计算量最高,约为1010量级,这是由于其为避免频谱混叠而进行的高倍升采样操作造成的结果。
图3(a)和图3(b)分别给出了固定脉冲数和固定距离向采样点数情况下计算量随另一变量的函数关系曲线,对比4种算法的曲线可以发现抽取拼接算法的计算过程最简单,因此计算量最低,本文的NUFFT方法和传统的频域合成方法计算量相当,甚至稍好于后者,而时域合成方法相比其它算法高出了近3个数量级。

表 1 4种算法的计算量比较Tab. 1 Computational complexity compare of four algorithms
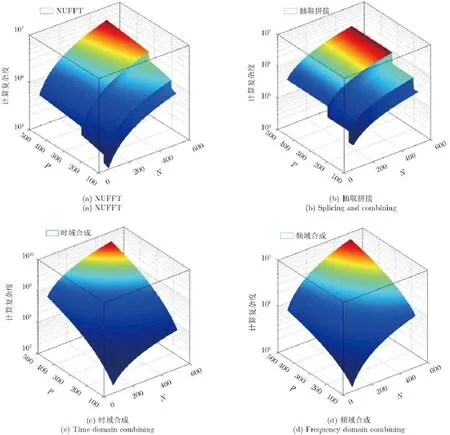
图 2 4种算法的“计算量-采样点数(N)-脉冲数(P)”曲线Fig. 2 Four algorithms “Computational complexity-sampling point (N)-pulse number (P)” curve
需要指出的是,图3(b)中的阶梯型函数是由于做I(p)列IFFT运算导致的,而在时域合成和频域合成方法中,是将每个子脉冲在时域和频域做合成操作处理,不涉及按列的脉冲间运算,因此不会仍然是一条平滑的对数函数曲线。在跳变点处,2的整数次幂点IFFT操作的目的是加快傅里叶变换的速度,但脉冲数(横轴)的微小变化会导致计算量(纵轴)的成倍增加这一不利后果,实际中其最终效应是使得算法速度提升还是降低,有待于进一步论证。
4 仿真验证
本节中利用仿真数据验证本文所提方法的有效性。仿真中采用的线性调频信号的参数为(表2):脉冲宽度Tp=5 μs,调频率信号带宽B=30 Hz,相应的距离分辨率为5 m,依据奈奎斯特采样定理,脉冲个数100,频率跳变间隔6.25 MHz。在目标场景中放置M1坦克模型,其长约7 m,根据雷达波长与一般目标(飞机、坦克、舰船等)尺寸的相对大小关系,可知雷达工作在光学区。由散射中心理论可知,目标的散射可以等效为若干个散射中心组成的散射源。对于坦克目标,强散射中心的位置主要分布于炮筒前端、主炮与机身连接处、机身边缘位置,其它部位如弹药架、履带等位置也可能产生若散射回波。将坦克建模为如图4所示的主要散射点分布图,散射中心的位置及幅度列于表2中,定义目标散射点的散射强度为归一化幅度(从0~1不等)。雷达平台位于目标正前方500 m处,雷达与目标均处于静止状态。

图 3 计算复杂度分析Fig. 3 Analysis of the computational complexity

表 2 M1坦克主要散射中心位置与幅度分布Tab. 2 M1 tank main scattering points’ location and amplitude
采用NUFFT方法进行成像处理,其中主要参数的选取依据3.3节的分析,K=I(p),p=100~500,J=6,其最终1维高分辨像如图5所示。
从图4与实际算法成像结果图5的对比中可以看出NUFFT成像算法的有效性,图5中各散射点的位置和幅度列于表3中。对比表2与表3可以看出,NUFFT还原结果与仿真预设值基本吻合,误差在2%~5%范围内。该偏差是由于采样峰值点的位置不在sinc函数的峰值处以及理想冲激函数的回波展宽导致的能量泄露引起的。

图 4 目标主要散射点分布示意图Fig. 4 Target's main scatter points distribution illustration
从图5的成像结果中可以看到各个点目标的回波基本为一sinc函数,符合模型中对雷达回波进行脉冲压缩的理论结果,个别点目标的旁瓣不对称是由于相邻散射点的影响所致。取104.8 m处的散射点2进行分析(图6)可见,其第1副瓣水平约为–13.3 dB,同样符合理想点目标的成像结果,且第2,第3旁瓣也与理想sinc函数吻合的较好,由此验证了NUFFT方法在1维高分辨成像中的有效性。

图 5 目标场景1维高分辨像Fig. 5 HRRP of the target scene

表 3 成像结果各散射中心位置与幅度分布Tab. 3 Each scattering points’ location and amplitude in imaging result

图 6 104.8 m散射点成像结果与理想sinc函数对比Fig. 6 Comparison of imaging result and ideal sinc function of scattering point at 104.8 m
基于上述成像方法,为验证此方法在目标识别中的有效性。本文仿真了两类地面目标(M1坦克,防空单元)相对于雷达5种静止姿态情况下(目标轴线与雷达视线方向夹角:迎头(0°)、前斜(45°)、正侧(90°)、后斜(135°)、尾追(180°),见图 7)的雷达回波,并用NUFFT方法快速成像,根据1维像的成像结果提取目标特征进行识别。

图 7 M1坦克车和防空单元相对于雷达的5种姿态Fig. 7 Five positions of M1 tank and air defense units
用上文的仿真参数,对每种目标每个姿态各200帧的数据进行NUFFT成像,共产生11×200个 1维像,在成像结果的基础上,提取目标散射点数和目标长度两个特征进行分类识别。
如图8所示,从目标的2维特征分布可以看出,两类目标的各个姿态下由于其散射点和长度区分度较大,基本可以区分。但相同姿态不同目标的特征会有交叉重叠,类间区分度不大。需要提取目标其他特征进行辅助识别。

图 8 目标散射点数–1维像长度2维特征分布图Fig. 8 Target's scattering points–HRRP length 2-D diagram of distribution
5 结论
本文提出了一种基于非均匀傅里叶变换的调频步进频信号高分辨成像方法,利用非均匀快速傅里叶变换代替常规算法中复杂的时移、频移等操作,有效降低了成像算法的计算复杂度,加快了信号处理的速度。理论分析与仿真实验表明,基于非均匀快速傅里叶变换的快速成像算法能对目标场景进行清晰准确地成像,为后续的目标识别步骤提供了保障。
[1]Jacobs S P. Automatic target recognition using highresolution radar range profiles[D]. [Ph.D. dissertation],Washington University,1999.
[2]Long T,Li D,and Wu Q Z. Design methods for step frequency waveform and the target pick-up algorithm[J]. Systems Engineering and Electronics,2001,23(6): 26–31.
[3]Li D and Long T. Target's redundance removed algorithms of step frequency radar[J]. Acta Electronica Sinica,2000,28(6): 60–63.
[4]Long T,Han Y,and Mao E. Digital signal processing of stepped frequency radar[J]. Acta Aseronqutica et Astronautica Sinica,2001,22(S1): 16–25.
[5]Bai X,Mao S Y,and Yuan Y N. Time domain synthetic bandwidth methods: A 0.1 m resolution SAR technique[J]. Acta Electronica Sinica,2006,34(3): 472–477.
[6]Wilkinson A J,Lord R T,and Inggs M R. Steppedfrequency processing by reconstruction of target reflectivityspectrum[C]. Proceedings of the 1998 South African Symposium on IEEE Communications and Signal Processing,COMSIG'98,1998: 101–104.
[7]Potts D,Steidl G,and Tasche M. Fast Fourier Transforms for Nonequispaced Data: A Turorial[M]. Benedetto J J and Ferreira P,Modern Sampling Theory: Mathmatics and Applications,Boston: Birkhauser,2001: 247–270.
[8]Fessler J A and Sutton B P. Nonuniform fast Fourier transforms using min-max interpolation[J]. IEEE Transactions on Signal Processing,2003,51(2): 560–574.
[9]Dutt A and Rokhlin V. Fast Fourier transforms for nonequispaced data[J]. SIAM Journal on Scientific Computing,1993,14(6): 1368–1393.
[10]Liu Q H and Nguyen N. An accurate algorithm for nonuniform fast Fourier transforms (NUFFT's)[J]. IEEE Microwave and Guided Wave Letters,1998,8(1): 18–20.
[11]Nguyen N and Liu Q H. The regular Fourier matrices and nonuniform fast Fourier transforms[J]. SIAM Journal on Scientific Computing,1999,21(1): 283–293.
[12]Fessler J and Sutton B P. Nonuniform fast Fourier transforms using min-max interpolation[J]. IEEE Transactions on Signal Processing,2003,51(2): 560–574.
[13]Schaller S,Flohr T,and Steffen P. An efficient Fourier method for 3-D radon inversion in exact cone-beam CT reconstruction[J]. IEEE Transactions on Medical Imaging,1998,17(2): 244–250.
[14]Sarty G E,Bennett R,and Cox R W. Direct reconstruction of non-Cartesian k-space data using a nonuniform fast Fourier transform[J]. Magnetic Resonance in Medicine,2001,45(5): 908–915.
[15]Song J,Liu Q H,Kim K,et al.. High-resolution 3-D radar imaging through nonuniform fast Fourier transform (NUFFT)[J]. Communications in Computational Physics,2006,1(1): 176–191.

向 寅(1981–),男,博士后,2010年于中国科技大学获得博士学位,后在中国科学院电子学研究所任博士后,研究方向为压缩感知、合成孔径雷达成像和信号处理。
E-mail: xy_overlimit@sina.cn

张 凯(1989–),男,硕士研究生,2015年3月获得北京理工大学信息与通信工程专业工学硕士学位,研究方向为雷达目标识别。
E-mail: zhangkai3325@163.com

胡 程(1981–),男,研究员,博士生导师,2003年7月获得国防科学技术大学电子工程专业学士学位,2009年7月获得北京理工大学目标探测与识别专业工学博士学位,在攻读博士学位期间,于2006年3月至2007年5月赴英国伯明翰大学电子工程系进行为期15个月的访问研究。2014年破格聘为研究员、博士生导师。主要研究方向为地球同步轨道SAR、地基SAR及新体制SAR成像与差分干涉处理技术。
E-mail: cchchb@163.com
A NUFFT Based Step-frequency Chirp Signal High Resolution Imaging Algorithm and Target Recognition Algorithm
Xiang Yin Zhang Kai Hu Cheng
(Institute of Radar Technology,Beijing Institute of Technology,Beijing 100081,China)
Radar Automatic Target Recognition (RATR) is the key technique to be breaked through in the fuure development of intelligent weapon system. Compared to the 2-D SAR image target recognition,High Resolution Range Profile (HRRP) target recognition has the advantage of low data dimension,low requirement of radar system's calculation and storage ability,and the imaging algorithm is also not complicated. HRRP imaging is the first and the key process in target recognition,its speed and imaging quality can directly influence the real-time capability and accuracy of target recognition. In this paper a new HRRP imaging algorithm – NUFFT algorithm is proposed,the derivation of mathematical expression is given,both for the echo simulation process and the imaging process. In the meantime,by analyzing each step's calculation complexity,we compared the calculation complexity of four different imaging algorithms,we also simulate two target's imaging and target recognition processing. Theoretical analysis and simulation both prove that the proposed algorithm's calculation complexity is improved in various degree compared with the others,thus can be effectively used in target recognition.
Radar Automatic Target Recognition (RATR); High Resolution Range Profile (HRRP); Stepfrequency chirp; High Resolution; NUFFT
The National Natural Science Foundation of China (61172177)
TN958
A
2095-283X(2015)-06-0639-09
10.12000/JR15083
10.12000/JR15083.
2015-07-02;改回日期:2015-12-09;网络出版:2015-12-22
向寅 xy_overlimit@sina.cn
国家自然科学基金(61172177)
引用格式:向寅,张凯,胡程. 基于NUFFT的调频步进频高分辨成像与目标识别算法[J]. 雷达学报,2015,4(6): 639–647.
