全液压控制可移动揉性输送土方装备的设计与研究
2015-12-12蒋建云张瑞宏朱海荣
刘 松 蒋建云 张瑞宏 朱海荣
(1.淮安市水利工程建设处,江苏 淮安 223005;2.江苏省水利工程建设局,江苏 南京 210029;3.扬州大学机械工程学院,江苏 扬州 225009;4.江苏淮阴水利建设有限公司,江苏 淮安 223300)
淮河入江水道上起洪泽湖三河闸,经淮安、扬州及安徽省天长市,至江都三江营汇入长江,全长157.3 km,设计行洪能力12000 m3/s,是淮河下游的行洪主河道,淮河上中游70%以上的洪水由此下泄入长江。淮河入江水道整治工程通过实施河道切滩、抽槽、浚深和堤防及建筑物除险加固,恢复其设计行洪能力,工程于2011年10 月开工。
目前,宽浅型河道开挖或拓宽工程普遍采用挖掘机配渣土车运输的施工作业方法进行施工,其工序为:挖掘机将开挖的土方挖到渣土车上,由渣土车将土方运送到弃土区,土方被卸下之后再由推土机进行平整。该施工方法具有运土效率低,受施工道路、天气影响大,环境污染重,安全性较差,施工成本高等弊端[1]。入江水道工程建设、施工单位会同扬州大学机械工程学院针对传统土方施工方法存在的问题,结合入江水道整治改道段东西偏泓抽槽工程自行研制了一套土方输送系统,此土方输送系统是一种全液压控制可移动的揉性输送土方装备[2-4](以下简称土方运输机)。本工程中采用了连续揉性输送施工法[5-7]。
1 整体结构与技术参数
1.1 样机整体结构
本套机械可根据土方输送的距离由多节组成,每节长50 m,均具有独立移动的特点。每节输送机包括:移动系统(由钢架、轨道、油压千斤顶等组成)、300 MPa 液压系统(由油箱、油道管线、油缸等组成)、电气系统(由700 kW 发电机组、75 kW 电动机、输电线路、控制柜等组成)及皮带输送系统(由1.8 m 宽皮带、滚轴、变速箱、刮泥器、料斗组成)。整体结构如图1 所示。
1.2 局部结构与工作原理
输送装置由1.8 m 宽皮带、滚轴、刮泥器和料斗组成,土方挖掘机将土方装于料斗内,由皮带系统送至弃土区。为防止泥土粘住皮带影响工效,专门安装刮泥器及时清除粘连在皮带上的泥土。运输机高度调整装置由6 只油缸千斤顶组成,根据现场地势高低和弃土区的堆土高程,利用液压系统中两端的油压千斤顶调节输送机的倾斜度,同时利用油缸千斤顶的稳定支撑作用,保证整节输送机在作业过程中平稳运行。移动装置由钢架、轨道和油缸千斤顶组成,每节输送机一共安装18 只油缸千斤顶和6根轨道,其中,安装4 只油缸千斤顶和2 根轨道保证输送机能左右平移,安装8 只油缸千斤顶和4 根轨道保证输送机能够前后移动[8]。其剖面图如图2、图3 所示。
1.3 主要技术参数
经过反复设计改进和试验,确定了土方运输机的各项技术参数指标:①每套装备共8 节,每节长度50 m,每节质量低于30 t;②每套装备每台班开挖运输土方大于6000 m3;③装备每次移动1.2 m;④液压系统为300 MPa;⑤皮带宽为1.8 m。

图1 整机结构示意图
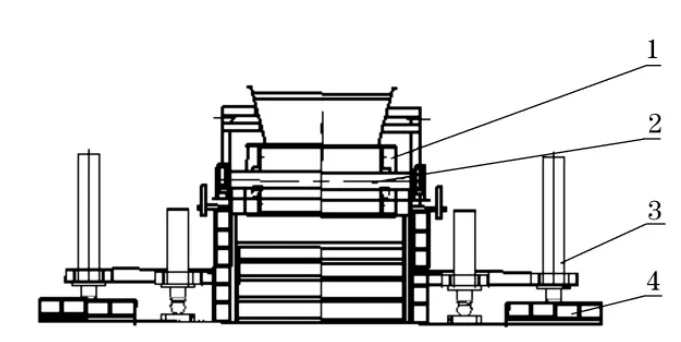
图2 皮带运输机剖面结构示意图
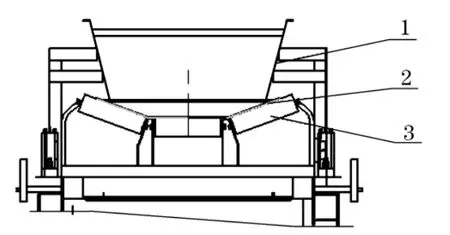
图3 皮带运输机局部剖面示意图
2 土方运输机的设计路线
2.1 总体技术路线
土方运输机的技术途径是:结合国内外土方输送系统发展趋势,运用我国河道整治过程中土方运输设备设计制造的关键技术,采取理论研究、规律探索与实验验证相结合,前沿技术研究与工程应用示范相结合的方式,集中和融合科研院所和装备制造企业各自的优势,开展全液压自动控制可移动大型土方揉性输送成套装备研发。本研究对改善河道整治工作环境、降低作业成本、提高作业效率具有重要的意义,将推动我国水利建设工程的发展[9-10]。
2.2 具体技术路线
(1)桁架优化设计研究
基于数字化精准设计与多学科优化设计技术的要求,在设计研究这套全液压自动控制可移动大型土方揉性输送成套装备的桁架时,通过优化,在保证适应于传送带合理布置的基础上力求机构合理,以提高整个装备的材料利用率,实现轻量化,降低装备制造成本,同时提高装备的使用寿命。本方案流程图如图4 所示。
(2)快速组装设计研究
为了在使用过程中拆装方便、快速,开展了相关联接部件的模块化拆分设计和快速接头接口个性化设计,通过接头接口强度试验进行接头接口强度校核,在保证联接强度的情况下优化联接结构,并进行快速组装工艺研究,基于模拟装配技术进行模拟装配试验,通过模拟装配获得最佳装配工艺以提高装配效率。快速组装设计流程图如图5 所示。
(3)液压自动化控制系统设计及试验优化研究
全液压自动控制可移动大型土方揉性输送成套装备中存在众多需控制的液压系统,如果人工控制势必影响整个系统的效率以及增加成本,本项目开展了基于多传感器融合技术的液压自动化控制系统研究,使得装备可以自动保持平衡,在移动的过程中通过微机控制与事先存储的程序实现自动化控制。同时,开展了故障警示研究,使得装备在遇到紧急情况时可以开启保护系统并指示出故障源。液压自动化控制系统设计流程如图6 所示。
(4)移动系统研究试验及优化研究
本研究采用稳态步进式仿生结构,其技术路线如图7 所示。
(5)挖土、送土、堆土最佳参数匹配工程化优化研究
由于土方运输效率受挖土、送土、堆土速率影响,故分析不同挖土、送土、堆土参数对运输效率的影响规律,建立数学模型,进行多参数匹配研究,确定出最优挖土、送土、堆土参数,从而使整套装备效率协同化。效率协同优化方案流程如图8 所示。
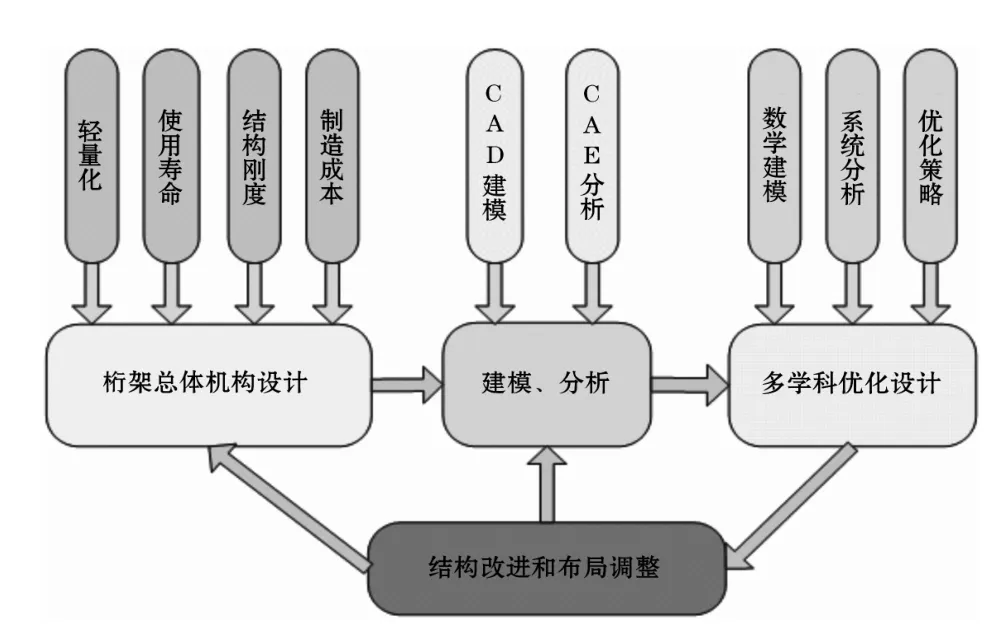
图4 桁架优化设计流程图
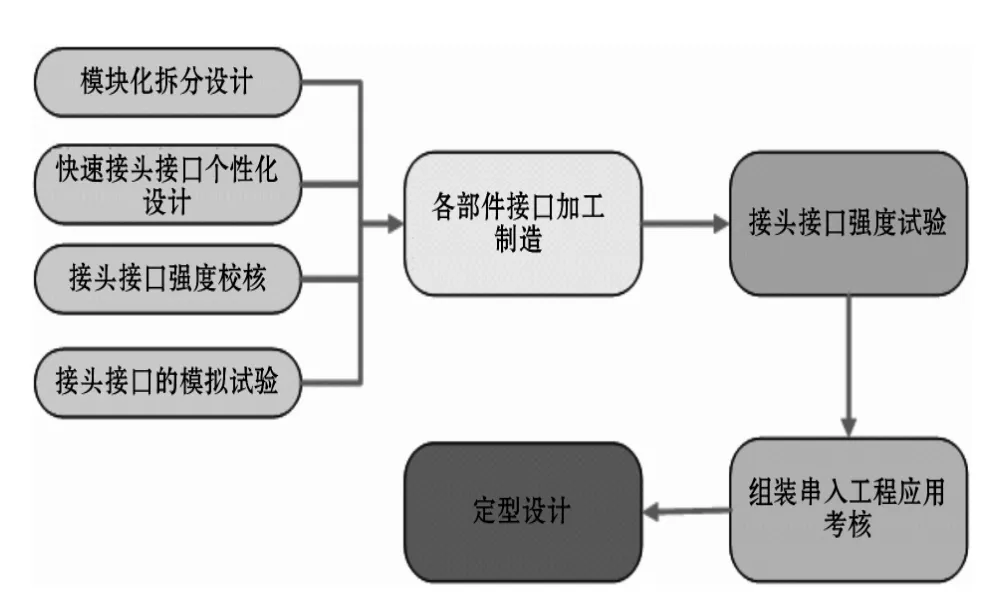
图5 快速组装设计流程图
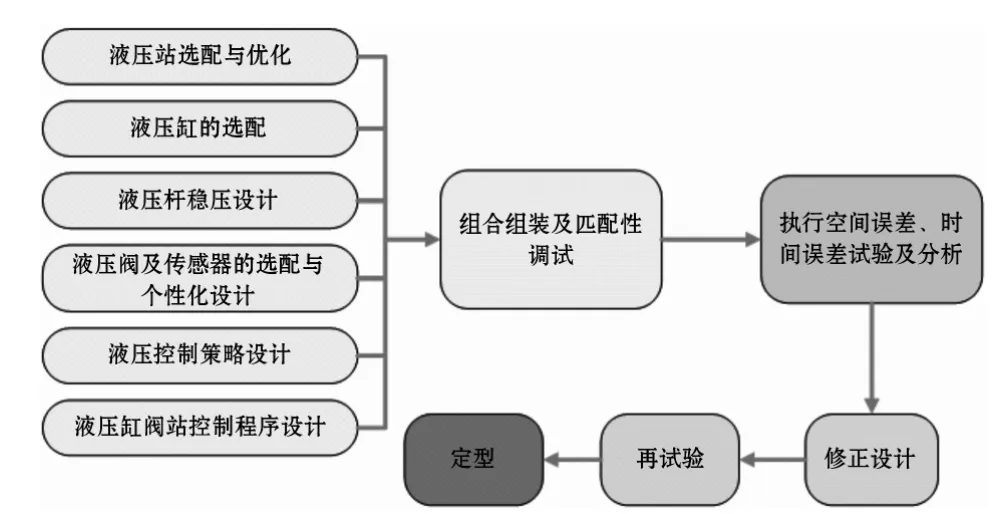
图6 液压自动化控制系统设计流程图
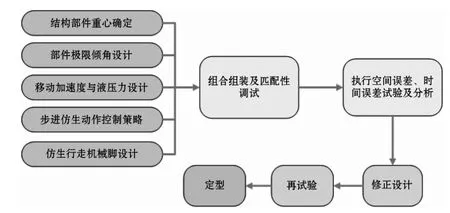
图7 移动系统研究试验流程图
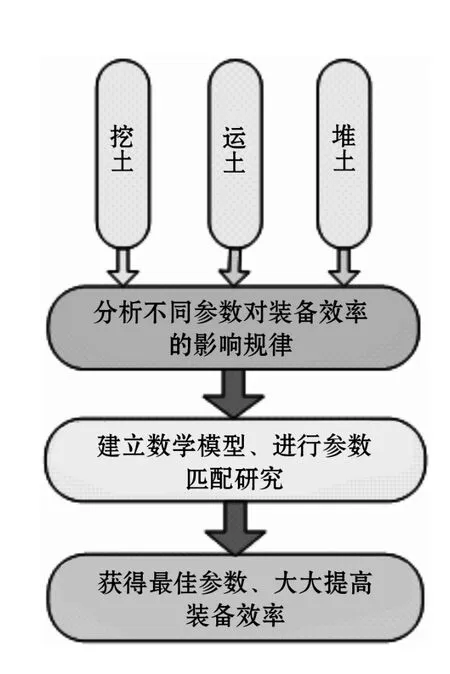
图8 效率协同优化方案流程图
3 结论
淮安市水利工程建设处、江苏淮阴水利建设有限公司会同扬州大学机械工程学院针对传统土方施工方法存在的问题,自行研制了一套土方输送机械系统,拟采用连续揉性输送法取代渣土车间断运输法,彻底解决现有河道疏浚方法存在的问题,为河道疏浚业带来一次技术变革。土方输送机械在淮河入江水道整治金湖县境内改道段东、西偏泓抽槽工程中的使用表明,其与传统土方施工机械相比具有环保、节能、安全、全天候及高效等施工特点,经济效益和社会效益显著。
[1]李敬亚.山地果园单轨运输机的研制[D].武汉:华中农业大学,2011.
[2]张衍林,樊啟洲,邓在京,等.一种山地单轨道果园运输机:中国,CN101544235[P].2009-09-30.
[3]张俊峰,李敬亚,等.山地果园遥控单轨运输机设计[J].农业机械学报,2012,43(2):90-95.
[4]庄丽,周顺华,宫全美,等.大面积软土基坑放坡开挖引起蠕变的数值分析[J].岩石力学与工程学报,2006,25(增刊).
[5]李学杰,张衍林,张闻宇,凌旭平.自走式山地果园遥控单轨运输机的设计与改进[J].2004,33(5):117-122.
[6]张俊峰,张衍林,张唐娟,等.遥控牵引式单轨运输机的设计与改进[J].华中农业大学学报,2013,32(3):130-134.
[7]李善军,邢军军.7YGS-45 型自走式双轨道山地果园运输机[J].农业机械学报,2011,42(8):85-88.
[8]张凯鑫,张衍林,梁秀英,等.基于Abaqus 的果园运输机橡胶辊滚动过程仿真[J].华中农业大学学报,2014,33(4):124-129.
[9]吴伟斌,赵奔,朱余清.丘陵山地果园运输机的研究进展[J].华中农业大学学报,2013(6).
[10]王伟宁.皮带运输机故障检测系统的研究和应用[J].兰州理工大学学报,2007(5).
