风电机组偏航传感器设计
2015-12-12任华彬徐凤荣王明军
文 | 任华彬,徐凤荣,王明军
当风电机组叶轮平面与风向垂直,即:叶轮轴线方向与风向一致时,叶轮吸收的风能最大,机组发电效率最高。由于风电场的风向不断变化,机组需要随着风向的变化按照一定的逻辑进行偏航对风。因此,偏航准确与否,直接关系到风电机组的发电效率。主动偏航系统偏航接近开关和偏航限位开关分别是偏航系统的检测元件和偏航极限停机的触发机构,本文将对这两个偏航传感器的设计进行分析和探讨。
风电机组偏航系统
风电机组的偏航系统,按驱动方式分为主动系统和被动系统两种。被动系统指的是依靠风力通过相关机构完成机组风轮对风动作的偏航系统,常见的有尾舵、舵轮和下风向三种;主动系统指由调向电机将风轮调整至迎风位置。主动偏航系统需要测量风向,根据风向和风轮平面法线方向来确定调整方向,虽结构非常复杂,但迎风过程是可控的。
兆瓦级风电机组采用主动偏航系统,通过偏航电机来调整风轮并使其对准风向。研究由电机带动的主动迎风偏航控制系统,使迎风调向准确稳定,对延长调向机构的寿命和提高发电量均具有十分重要的意义。
偏航系统也称对风装置,由控制与检测部分、驱动机构和扭缆保护装置三部分组成。偏航系统的主要作用有两个:其一是与风电机组的控制系统相互配合,使风电机组的风轮始终处于迎风状态,使风电机组能充分吸收风能,提高机组的发电效率。其二是保证机组悬垂部分的电缆不至于产生过度的纽转而使电缆断裂、失效,在电缆达到设计缠绕值时能够自动解缆。
如图1所示,偏航系统主要由风向标、偏航电机、减速齿轮箱和回转体大齿轮组成。其工作原理为:控制系统通过对机舱尾部的气象设备测得的风速、风向及机组状态等信息进行分析,按照一定的逻辑确定是否需要驱动装置来调整机舱与风向的角度,使风轮叶片始终朝着迎风的方向,以保证风电机组在运行时能够充分吸收当前的风动能,电机通过同轴联接的减速齿轮箱减速后将动力传给塔筒法兰盘上的偏航大齿轮,从而带动整个机舱转动,当对风完成后,电机停止工作,液压刹车和电气刹车同时投入,偏航过程结束。另外,为保持整个过程的稳定性,偏航过程中需要液压站提供一定的制动力。
由于风向的不断变化,偏航电机也不断地运转。当向同一个方向偏航的圈数大于设定的圈数时,会引起电缆的缠绕甚至出现电缆绞死,影响风电机组的正常运转,因此系统设置了自动解缆命令。当圈数超过风电机组设定的圈数时,系统执行自动解缆命令,启动偏航电机,向相反的方向转动缠绕的圈数;当出现因软件或硬件的原因导致自动解缆失效时,风电机组会触发偏航限位开关极限位置达到保护扭转电缆的目的。
偏航系统接近开关与限位开关
如图2所示,偏航系统由轴承、刹车器、驱动电机、减速齿轮箱、接近开关和限位开关等部件组成。该系统为主动式系统,能够根据风电机组尾部的风向仪测得的风向值与风电机组实际偏航角度按照一定的逻辑自动对风,使风轮的扫风面尽量与风向垂直,以最大限度的捕获风能;同时会根据测得的角度值判断风电机组扭转电缆是否达到设置的软件极限保护值,当到达软件极限保护值时停机进行自动解缆;另外,出现软件失效时,通过偏航限位开关串联的硬件回路有效的保护扭转电缆。
对风和解缆需要知道风电机组实际的对风角度、电缆扭缆角度及偏航方向,某风电机组采用2个接近开关计算实际的风电机组对风角度、电缆扭缆角度及偏航方向,采用限位开关用于电缆扭缆的极限保护。偏航接近开关和限位开关在偏航系统工作过程中起到非常关键的作用,如设计的不合理,轻则出现因角度测量不准导致风电机组对风不准而影响发电量,重则出现扭断电缆的严重事故。
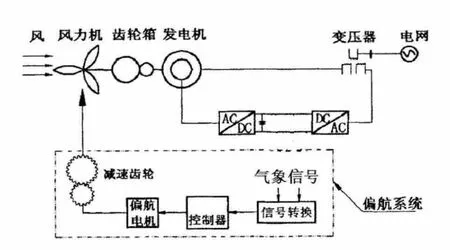
图1 风电机组偏航控制系统结构
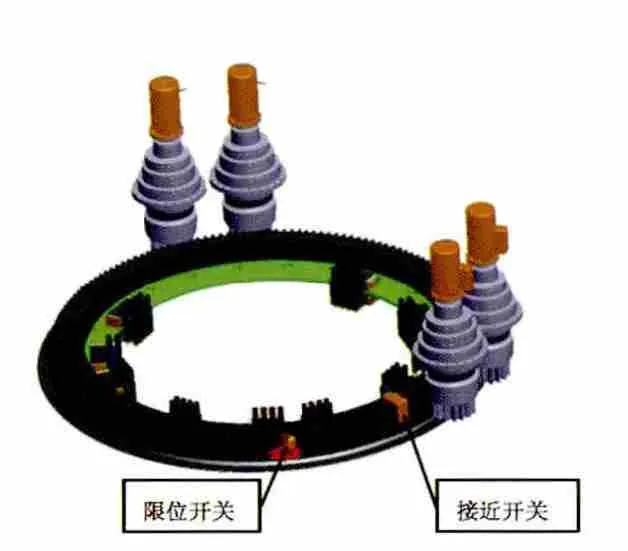
图2 偏航系统结构
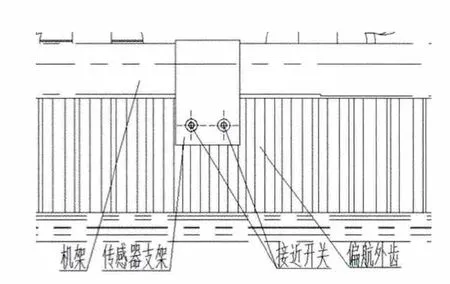
图3 偏航传感器位置
偏航接近开关设计
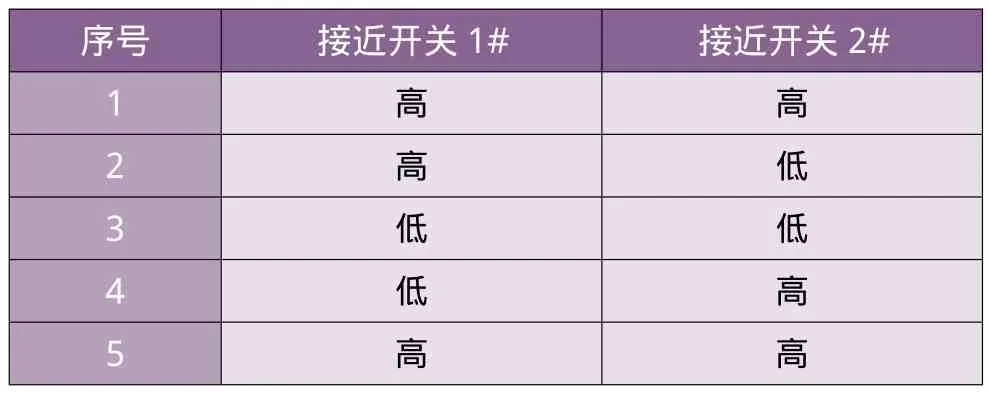
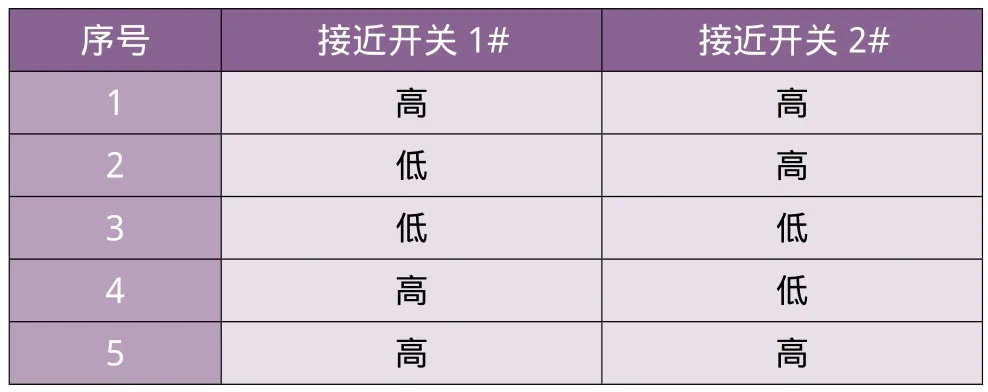
某风电机组偏航系统的接近开关安装相对位置如图3所示。接近开关用于测量实际机舱角度(相对于正北方向)和方向的传感器,该风电机组偏航外齿圈齿数为169个,定义齿顶宽如图4中的B,定义齿间距如图4中的C,当偏航电机运行时通过减速齿轮箱带动外齿圈运行,接近开关经过一个齿顶时产生一个高电平信号,运行一整圈接近开关将产生169个高电平信号,即一个高电平信号对应的偏航角度为2.13°,控制系统根据测量的高电平信号个数计算出实际的偏航角度。另外2个接近开关在分别接近齿顶时会产生高电平信号,在离开齿顶向齿底运行时高电平信号将消失,可以通过2个接近开关高、低电平信号的逻辑关系判断实际偏航运动的方向,如2个接近开关的高、低电平信号如表1所示,则代表逆时针偏航,高、低电平信号如表2所示,则代表顺时针偏航。但只有接近开关1和2之间的间距满足一定的关系时才能出现表1和表2所示的高、低电平序列,通过实际测试和公式计算,当图4中所示的接近开关之间的距离A应满足C 图4 偏航齿距及传感器间距 表1 逆时针偏航序列 表2 顺时针偏航序列 偏航限位开关的安装位置如图2所示,主要作用为在计数传感器或软件出现问题时,通过触发限位开关极限信号保护机组的扭转电缆。在偏航过程中,通过偏航外齿和限位开关齿盘之间的啮合带动限位开关轴的转动,轴上连接有不同变比的凸轮,通过轴的转动带动不同变比的凸轮转动,当到达设定的极限角度时(如720°),对应的凸轮会顶住相应的开关点,该开关点信号用于切断相应的偏航控制回路,从而达到保护扭转电缆的目的。不同机组限位开关本身的结构基本一致,主要的工作是根据不同的偏航齿圈、限位开关齿盘及机架尺寸设计满足要求的安装支架。 标准齿外啮合的情况如图5所示,d为齿的啮合圆直径,m为齿的模数,Z为齿数,ha为啮合圆和齿顶圆之间的距离,a为两个齿啮合的中心距,根据机械手册可知: 啮合圆直径 d=mZ+2ha 一般情况 ha=m 可得 d=mZ+2m=m(Z+2) 可分别得2个啮合圆直径 d1= m(Z1+2),d2= m(Z2+2) 两个齿圈啮合的中心距a=(d1+d2)/2=m(Z1+Z2+4)/2 图5 标准齿外啮合 根据以上公式可以计算出偏航齿圈和限位开关齿盘啮合后的中心距离。如某机型的偏航齿数Z2=169,限位开关齿盘齿数为Z1=12,模数m=18,通过以上公式计算可得偏航齿圈啮合圆直径d1=3078mm,限位开关啮合圆直径d2=252mm,进而得两个齿圈啮合后的中心距a=1665mm,根据以上计算的结果、机架的相关尺寸及限位开关传感器的尺寸即可设计限位开关传感器的支架,同时根据限位开关啮合圆直径d2设计限位开关齿盘。 风电机组偏航系统实现风电机组对风发电和电缆出现扭缆后的解缆,且在软件异常时能有效保护扭转电缆不被扭断,实现对风和解缆功能需要测量实际的偏航角度、电缆扭缆角度及运行方向,实现软件异常时的电缆保护需要设计限位开关保护。在实际的样机设计中出现过传感器设计不合理导致偏航系统不能正常工作的情况,本文详细介绍了测量偏航角度大小和方向的一种设计方法及偏航限位开关的设计过程,在实际工程设计方面具有重要的指导和现实意义。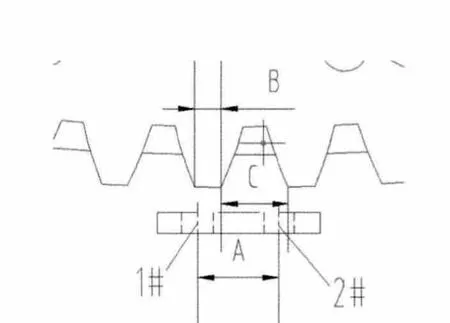
偏航限位开关设计

结语