GNSS失锁状态下车载移动扫描系统的点云数据精度分析
2015-12-11段龙飞戴华阳廖孟光徐卫东
段龙飞,戴华阳,廖孟光,徐卫东
(1.中国矿业大学(北京),北京100083;2.拓普康(北京)科技发展有限公司,北京100176)
一、引 言
移动测量系统作为快速、高效和高集成度的海量点云数据的采集手段,已经成功应用于我国数字化信息城市建设中,它代表着未来测绘与地理信息技术的一个重要发展方向[1]。随着科学技术的不断革新,车载移动测量设备的硬件配置在不断提高,从早期使用的机械陀螺发展为当今的光纤和激光陀螺,相机的像素从百万级别提高到了千万级[2],数据采集精度也有了很大的提高[3]。
尽管移动测量设备集成了高精度的IMU和车轮编码器[4],但是其采集数据的精度主要依赖于GNSS设备。当在城市采集数据时,遇到高压电线、高楼或强磁场等环境则可能会导致GNSS失锁,此时移动测量设备的数据精度主要由IMU和车轮编码器来维持[5]。随着失锁时间延长,数据的精度变得越来越差。
目前,针对移动测量系统的研究已经有了很多。如张卡等根据误差传播定律,推导了X、Y、Z 3个方向上的影像坐标误差公式及点位误差公式[6];Yang等分析了移动测量系统点云数据在历史文化遗产中的应用[7];刘梅余等针对车载移动测量系统的精度和利用控制点提高点云数据精度进行了相关分析[8-9]。但是,对于移动测量系统的点云数据在GNSS失锁状态下的精度分析,暂未进行相关的试验。本文旨在通过一系列的试验,获得移动测量系统失锁状态下的点云数据,分析和研究点云数据精度随时间的变化规律。
二、点云精度分析
分析车载移动测量系统在GNSS失锁状态下的点位精度,必须建立一个理想的失锁环境,本文通过人为操作拔掉GNSS天线来模拟车载失锁状态下的数据采集环境。
1.路线设计
选择视野良好场所分别进行人为1 km失锁和2 km失锁试验。失锁状态下,在不同长度距离上,对正常情况下和失锁状态下参考控制点进行计算,比较计算的结果。
(1)行走路线
选择一条近似直线的道路,每隔50 m做一个标记点,如图1所示。

图1
(2)实地采集路线图
本次设计路线长1.6 km,车速保持在30 km/h,标记点个数为3,当行驶至标记点位置时,降低车速至5 km/h。如图2所示。
(3)试验设计
①试验1
试验1如图3所示。

图2 实地采集路线

图3
当车载系统失锁1 km的路程时,对比两次采集的标记点的坐标值,并求解误差值。
②试验2
试验2如图4所示。
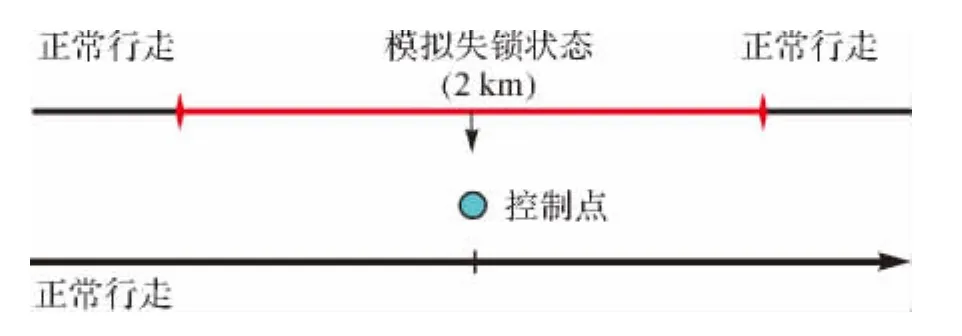
图4
当车载系统失锁2 km的路程时,对比两次采集的标记点的坐标值,并求解误差值。
2.误差分析
通过对试验1和试验2采集的数据进行整理,获得车载系统在不同试验下的3个标记点的坐标,求解获得标记点在X、Y、Z、2D和3D上的误差值,结果见表1。
以横轴作为失锁时长,纵轴作为标记点的坐标值与真值的差值,绘制线画图,如图5所示。
分析以上图表,可以获得如下结论:
1)0 s outage失锁状况下,车载系统IMU几乎没有漂移,数据采集误差分别为:X方向最大偏差为-0.023 m,Y 方向最大偏差为-0.021 m,Z 方向最大偏差为0.020 m,观测结果较好。

表1 控制点的误差值 m
2)15 s outage失锁状态下,标记点的坐标值误差增大,IMU漂移值增大,数据采集误差分别为:X方向最大偏差为0.120 m,Y方向最大偏差为0.126 m,Z 方向最大偏差为-0.028 m。
3)30 s outage失锁状态下,IMU漂移值进一步增大,标记点的坐标值误差在X方向有所减低,Y方向和Z方向增大,数据误差分别为:X方向最大偏差0.090 m,Y 方向最大偏差 0.187 m,Z 方向-0.086 m。
4)60 s outage失锁状态下,IMU漂移值继续增大,且中误差EMS值大于2.0,标记点的坐标值误差在X方向上增减不一,(t_1)点误差增大,(t_2)和(t_3)点的误差值减小,最大误差达到0.092 m;Y方向和Z方向的误差值进一步急速增大,Y方向最大误差为 0.284 m,Z 方向最大误差为-0.345 m。
5)从平面(2D)误差值表得出,(t_1)标记点的误差值在失锁30 s时有所减低,但是整体上误差值在增大;(t_2)和(t_3)标记点的误差值随着失锁时长的增加,误差值急速增大。平面最大误差为0.288 m。
6)从三维(3D)误差值表得出,随着失锁时长的增加,标记点的误差值逐渐增大。三维最大误差达 0.443 m。
当失锁 60 s时,数据的 3D最大误差高达0.443 m。当遇到此类情况时,尽量快速通过失锁区域,以保证数据整体的精度。
车载移动测量系统的失锁时长大于30 s后的精度将无法保证,失锁时长大于60 s后的精度将无法应用于工程领域中。
3.假设验证
再次采集一段失锁50 s的数据作进一步验证,如图6所示。
增加控制点个数至25个,监测车载移动测量系统在失锁50 s时,25个标记点的X、Y、Z和2D坐标的平均值、最大值及中误差的变化量,见表2。

表2 标记点的误差值 m
当失锁50 s时,25个标记点的平均值、最大值和中误差值成倍增加,其中平面(2D)误差值最大达到0.861 m,已经无法制作1∶5000的地形图,更无法满足一般使用用户的精度要求。因此当移动测量系统失锁时间达到50 s后,数据成果无法正常使用。
三、结 论
通过试验得出,车载移动测量系统在1 min内的GNSS失锁状态下,数据精度的变化量呈现近似线性的变化规律。当失锁时长达到50 s时,数据精度将无法达到工程项目的精度要求。根据IMU配置的不同,其斜率的变化量也不同。当采用机械陀螺集成的IMU,斜率变化量相对较大,而采用光纤陀螺或激光陀螺集成的IMU,斜率值变化较小。因此,当遇到GNSS失锁状态时,应尽量保证失锁的时长小于50 s。
本文分析了在GNSS失锁状态下,由于IMU漂移导致定位误差的试验数据和基本规律。关于在GNSS失锁状态下,如何从算法上加以改正,从而获得高精度的定位结果是下一步的研究内容。
针对数据的采集,给出如下建议:
1)选择视野良好的场所启动车载系统,等待数据接收稳定后,启动车辆。
2)快速通过失锁区域,保证失锁时间在50 s以内。
3)车辆稳步启动、缓慢刹车避免车身抖动过大,尤其在失锁的临界位置,要保证车辆在行驶过程中的连贯性。
[1]徐工,程效军.移动测量系统点云精度评定及应用分析[J].工程勘察,2013(9):42-46.
[2]张晓东.可量测影像与GPS/IMU融合高精度定位定姿方法研究[D].郑州:信息工程大学,2013.
[3]周静,张书亮,房彩申.基于可量测实景影像的空间服务研究[J].南京师范大学学报:工程技术版,2014(3):57-62.
[4]NÜCHTER A,BORRMANN D,ELSEBERG J.Algorithmic Solutions for Computing Precise Maximum Likelihood 3D Point Clouds from Mobile Laser Scanning Platforms[J].Remote Sensing,2013(5):5871-5906.
[5]DAHAI G,LIXIN W,JIANCHAO W,et al.Use the GPS/IMU New Technology for Photogrammetric Application:Geoscience and Remote Sensing Symposium[C]∥IEEE International Conference.Denver:[s.n.],2006.
[6]张卡,盛业华,叶春,等.车载三维数据采集系统的绝对标定及精度分析[J].武汉大学学报:信息科学版,2008,33(1):55-59.
[7]YANG W,CHEN M,YEN Y.An Application of Digital Point Cloud to Historic Architecture in Digital Archives[J].Advances in Engineering Software,2011,42(9):690-699.
[8]刘梅余,鲍峰.基于已知点的移动测量系统测量精度提高[J].测绘信息与工程,2009(3):35-36.
[9]刘梅余,王卫安,鲍峰.移动测量系统的精度分析及检测[J].测绘通报,2009(12):40-42.