基于分层滑模控制的VTOL飞行器轨迹跟踪*
2015-12-08邹立颖苗凤娟陶佰睿
邹立颖,苗凤娟,朱 磊,陶佰睿
(齐齐哈尔大学 通信与电子工程学院,黑龙江 齐齐哈尔161006)
基于分层滑模控制的VTOL飞行器轨迹跟踪*
邹立颖,苗凤娟,朱 磊,陶佰睿
(齐齐哈尔大学 通信与电子工程学院,黑龙江 齐齐哈尔161006)
针对VTOL飞行器的轨迹跟踪和稳定性问题,在考虑输入耦合前提下,提出了一种分层滑模控制方案。首先,将整个系统分成两个子系统,分别设计两个子系统的滑模面;然后利用其中一个子系统滑模量来构造中间变量,进而构造出整个系统总的滑模面;再利用等效控制法求取系统在该滑模面上的等效控制量,采用李雅普诺夫方法设计了系统的切换控制量,从而获得系统总的控制量。该控制器能够保证各个滑模面的稳定性和误差闭环系统的全局渐近稳定性。最后的仿真结果表明了该方法的有效性和可行性。
VTOL;滑模控制;欠驱动;轨迹跟踪
0 引言
VTOL(Vertical Take-Off and Landing)飞行器是能够垂直起降的典型欠驱动系统,因具有对起降环境依赖小、机动性强等特点,被广泛应用于军事和民用领域,其控制研究引发了国内外研究人员的广泛关注[1-3]。VTOL飞行器属于欠驱动系统,具有高度非线性、结构复杂、控制输入受限等特点,这给其控制研究带来了极大的困难[4]。已有大量文献对其进行了深入研究,文献[5]-文献[7]在忽略飞行器滚动控制输入和横向加速度间耦合关系的情况下,采用近似输入-输出线性化方法来研究系统的稳定性以及输出跟踪问题。文献[8]设计了VTOL全局镇定控制律。文献[9]研究了VTOL姿态稳定控制问题。文献[10]在考虑耦合存在的前提下,采用李雅普诺夫直接法设计了飞行器渐近稳定跟踪参考轨迹的控制器。
目前,VTOL飞行器的跟踪问题仍然是控制领域的研究热点。作为一种具有完全鲁棒性的变结构控制方法,滑模控制具有响应迅速、对系统参数变化和外界扰动不敏感、无需系统在线辨识、物理实现简单等优点[11]。因此可以用来控制VTOL飞行器。
本文对具有3个自由度、2个控制输入的VTOL飞行器的输出跟踪问题进行了研究,提出了一种分层滑模控制方案,可以实现飞行器在考虑输入耦合情况下的轨迹跟踪。
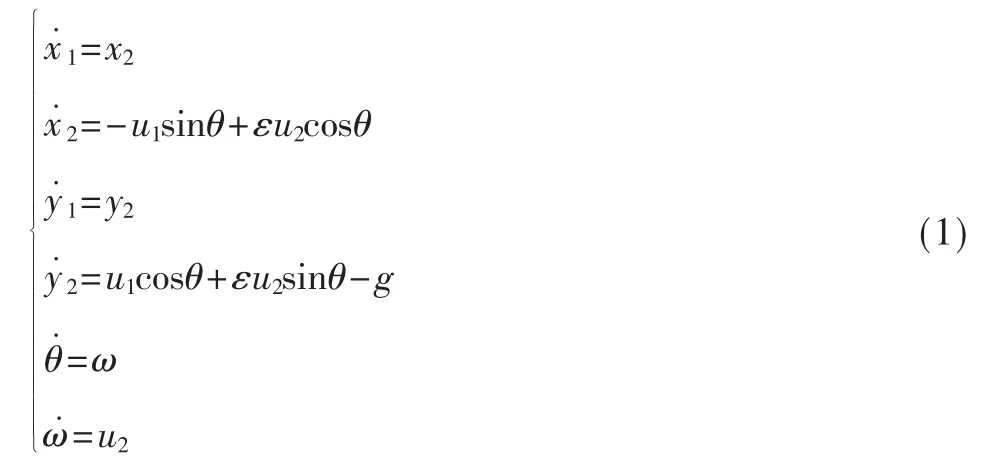
1 VTOL飞行器动力学模型
根据文献[5],VTOL飞行器动力学模型表示为:

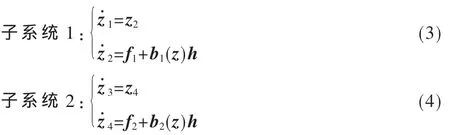
将系统(2)分解成两个子系统:
2 分层滑模控制器设计
本文解决的是欠驱动系统的输出跟踪问题,模型有3个输出、2个输入,对于跟踪问题,只能保证位置信号跟踪指令,定义飞行器的横、纵坐标的期望轨迹指令为x1d和 y1d,控制目标为:系统(1)的 x1和 y1跟踪指令信号x1d和y1d,滚转角 θ镇定。通过对系统(2)的控制律进行设计,可以完成控制目标。定义 z1、z2、z3、z4的跟踪指令信号分别为 z1d、z2d、z3d、z4d,跟踪误差为:e1=z1-z1d,e2=z2-z2d,e3=z3-z3d,e4=z4-z4d,则有e˙1=e2,e˙3=e4。
对于给定的指令信号 z1d、z2d、z3d、z4d,通过设计合适的控制律 h使得 e1→0,e2→0,e3→0,e4→0,系统就能够完成跟踪任务。
对两个子系统分别定义滑模面:

其中c1>0,c2>0。
构造系统的总滑模面为:

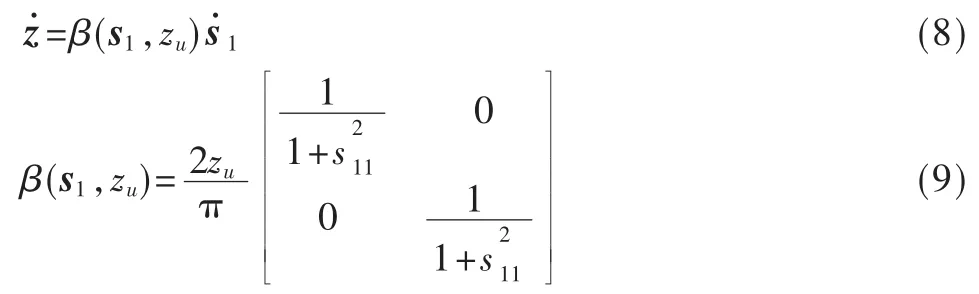
这里 z为中间变量,是 s1的函数,定义为:

其中 s1=[s11s11]T,||z||∞<zu,且 0<zu<1。
由式(7)可得:
由式(6)和式(8)得:

采用等效控制法,求得系统在滑模面上等效控制项为:

为保证系统的稳定性,采用李亚普诺夫方法设计切换控制项为:

其中η>0,λ>0。
因此,系统总的控制输入为:

3 系统稳定性分析
本节用 Lyapunov稳定性定理、Barbalat引理分别证明了各个滑模面的稳定性及误差子系统的渐近稳定性。
Barbalat引理[12]:如果 x(t)∈L2,且x˙(t)∈L∞,则。
3.1 系统总滑模面稳定性
定理 1对于系统(2),按式(5)和式(6)构造系统的滑模面,采用控制律式(13),则系统的总滑模面 S是渐近稳定的。

对上式两侧同时积分得:

由式(16)可得,S∈L∞,同时由(14)可知,<∞,因此有∈L∞,再由式(17)得S∈L2,根据Barbalat引理有0,即整个系统的滑模面S是渐近稳定的。
3.2 子系统滑模面稳定性
定理 2对于系统(2),按式(5)和式(6)构造系统的滑模面,采用控制律(13),则两个子系统的滑模面 s1和 s2是渐近稳定的。
证明:定义中间变量:


进而有:

因为zu的大小并不影响整个系统的稳定性,所以可以构造两个不同的系统滑模面 S1和 S2:

其中,zu1和zu2为任意小于1且不相等的正常数,所以S1≠S2,不失一般性,进一步假设:
由式(17)得 S∈L1,从而有:

4 仿真结果
为验证所提出的控制器的有效性,采用MATLAB工具进行了仿真实验。对于飞机的起飞过程,期望VTOL在滚转角为零的条件下飞机垂直升空。针对被控对象(1),设输入耦合系数 ε=10,g=9.8(ms-2)。跟踪指令设定为 xd=t,yd=sint。期望镇定滚动角 θd=0。被控对象初始状态取为[0.2 0 0.2 0 0.1 0]。采用控制器(13),控制参数分别取为c1=0.7,c2=1.5,η=0.1,λ=2.0,zu=1.0。为了降低抖振,采用饱和函数代替符号函数。仿真结果如图1~图7所示。
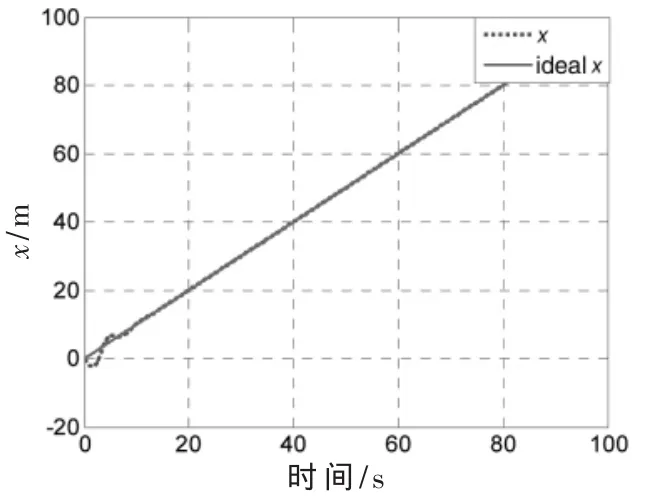
图1 飞行器质心的位置x1(t)跟踪
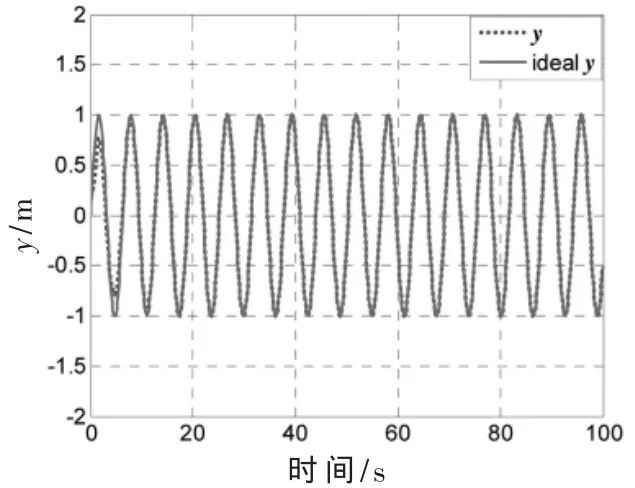
图2 飞行器质心的位置y1(t)跟踪
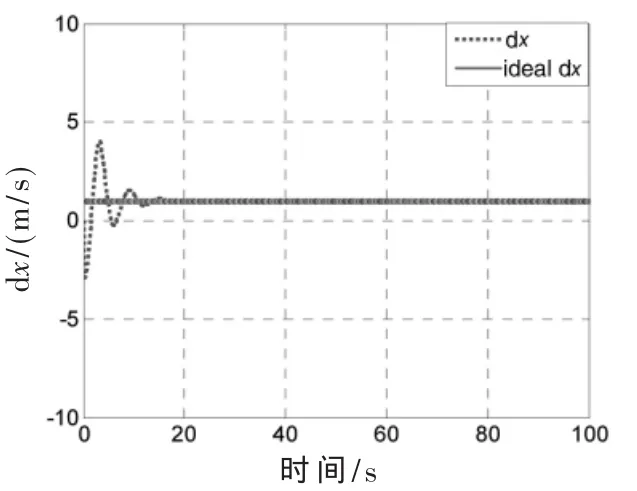
图3 飞行器质心的速度(t)跟踪
图1~图2表明,在控制器作用下,飞行器实际位置轨迹快速、稳定地收敛于期望位置轨迹。由图3~图4可见,飞行器实际速度轨迹快速、稳定地收敛于期望速度
轨迹。图5表明,滚转角快速收敛到θ=0。图6和图7为控制输入曲线,可以看出控制器快速、平稳地渐近收敛,控制效果很好。仿真结果验证了所提出的滑模控制器的有效性及前面给出的稳定性分析的正确性。
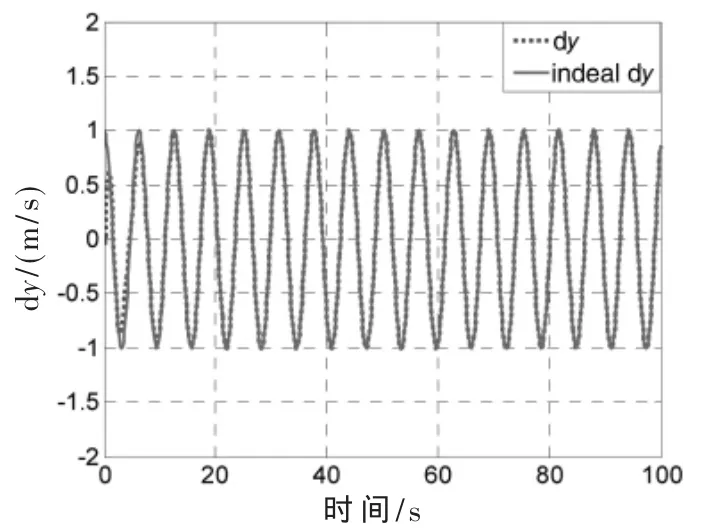
图4 飞行器质心的速度(t)跟踪
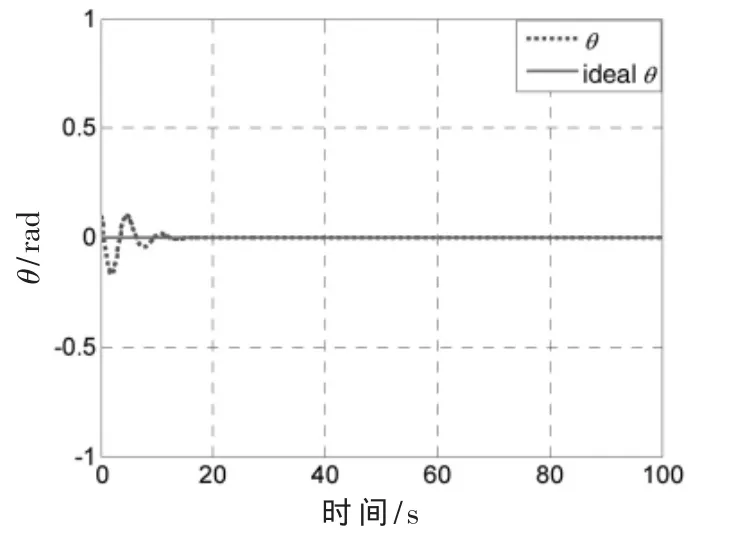
图5 飞行器滚动角度θ(t)的镇定
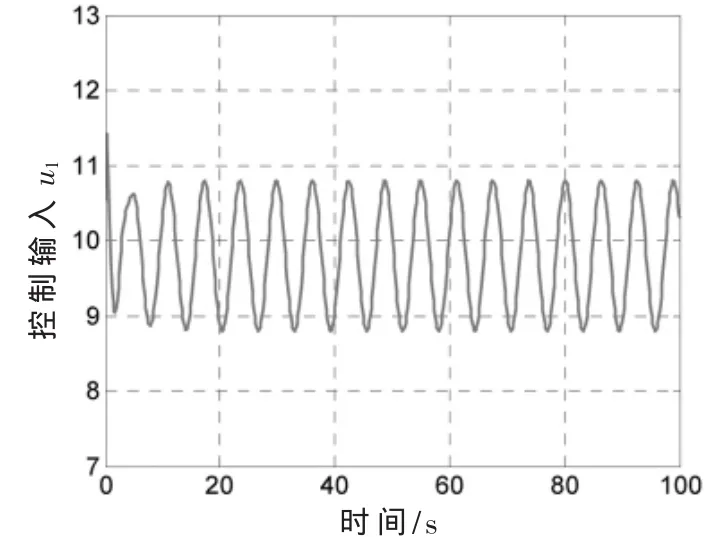
图6 飞行器底部推力控制输入u1
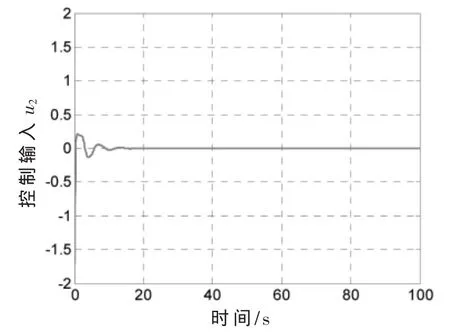
图7 飞行器滚动控制输入u2
5 结论
对于VTOL飞行器的输出跟踪问题,本文提出了一种分层滑模控制方案,可以实现飞行器在考虑输入耦合情况下的轨迹跟踪,并利用李亚普诺夫稳定性理论和Barbalat引理详细证明了各个滑模面的渐近稳定性和误差系统的全局渐近稳定性。与已有的控制方法相比,该方法提出的控制器设计简单、响应速度快,对系统参数变化和外界干扰具有鲁棒性,能够实现对给定轨迹的渐近稳定跟踪。同时,给出的仿真结果进一步验证了这种滑模控制方法的有效性和可行性。
[1]WANG X H,LIU J K,CAI K Y.Tracking control for a velocity-sensorless VTOL aircraft with delayed outputs[J]. Automatica,2009,45(12):2876-2882.
[2]ROBERTS A,TAYEBI A.A new position regulation strategy for VTOL UAVs using IMU and GPS measurements[J]. Automatica,2013,49(2):434-440.
[3]ABDESSAMEUD A,TAYEBI A.Global trajectory tracking control of VTOL UAVs without linear velocity measurement[J]. Automatica,2010,46(6):1053-1059.
[4]ROBERTS A,TAYEBI A.Adaptiveposition trackingof VTOL UAVs[J].IEEE Transactions on Robotics,2011,27 (1):129-142.
[5]HAUSER J,SASTRY S,MEYER G.Nonlinear control design for slightly non-minimum phase systems[J].Automatica (S0005-1098),1992,28(4):665-679.
[6]MARTIN P,DEVASIA S,PADEN B.A different look at output tracking:control of a VTOL aircraft[J].Automatica (S0005-1098),1996,32(1):101-107.
[7]HUANG C S,YUAN K.Output tracking of a non-linear non-minimum phase PVTOL aircraft based on non-linear state feedback[J].International Journal of Control(S0020-7179),2002,75(6):466-473.
[8]OLFATI-SABER R.Global configuration for the VTOL aircraft with strong input coupling[J].IEEE Transactions on Automatic Control(S0018-9286),2002,47(11):1949-1952.
[9]TAYEBI A,MCGILVRAY S,Attitude stabilization of a VTOL quadrotor aircraft[J].IEEE Trans.Control Systems Technology,2006,14(3):562-571.
[10]DO K D,JIANG Z P,PAN J.On global tracking control of a VTOL aircraft without velocity measurements[J].IEEE Transactions on Automatic Control(S0018-9286),2003,48 (12):2212-2217.
[11]HUNG J Y,GAO W,HUNG J C.Variable structure control:a survey[J].IEEE Transactions on Industrial Electronics,1993,40(1):2-22.
[12]TAO G.A simple alternative to the barbalat lemma[J]. IEEE Transactions on Automatic Control,1997,42(5):698.
Trajectory tracking of VTOL aircraft based on hierarchical sliding-mode control
Zou Liying,Miao Fengjuan,Zhu Lei,Tao Bairui
(College of Communications and Electronics Engineering,Qiqihar University,Qiqihar 161006,China)
This paper addresses a hierarchical sliding-mode control method to force a vertical take-off and landing(VTOL)aircraft to asymptotically track a given reference trajectory with consideration of input coupling.The control development is based on the hierarchical sliding-mode control strategy.Firstly,the whole system is divided into two subsystems and two sub-sliding surface are constructed.An intermediate variable,which is defined as the relevant function of a sub-sliding surface,is incorporated into the other sub-sliding surface,and then the sliding surface of the whole system is constructed.Secondly,the sliding mode control law of the whole system is obtained via Lyapunov method.Moreover,the asymptotic stability of all the sliding surfaces is proved theoretically by Lyapunov stability theory and Barbalat lemma.Finally,the numerical simulation results illustrate the effectiveness of the proposed control method.
vertical take-off and landing aircraft;sliding mode control;under-actuated;trajectory tracking
TP273
A
0258-7998(2015)04-0152-04
10.16157/j.issn.0258-7998.2015.04.038
2015-01-21)
邹立颖(1980-),女,硕士,讲师,主要研究方向:飞行器控制、智能控制、非线性控制。
黑龙江省教育厅科学技术研究项目(12541899)
