一种无模型的柔性关节机械臂非线性状态观测器设计
2015-12-08李光,符浩,杨韵
李 光,符 浩,杨 韵
(湖南工业大学 机械工程学院,湖南 株洲 412007)
一种无模型的柔性关节机械臂非线性状态观测器设计
李 光,符 浩,杨 韵
(湖南工业大学 机械工程学院,湖南 株洲 412007)
在复杂非线性摩擦阻尼参数以及模型参数不确定的情况下,针对柔性关节机器人的状态观测问题,提出一种基于神经网络的无模型非线性观测器。采用径向基神经网络(RBF)对系统模型进行在线逼近,通过Lyapunov稳定性分析推导,获得神经网络权值自适应律;通过引入鲁棒项来抑制神经网络逼近误差,加快观测误差的收敛速度;通过不同激励下的仿真分析,验证了提出方法的有效性。
柔性关节机械臂;状态观测器;非线性系统;鲁棒性
1 研究背景
由于轻型机械臂具有轻型化、类人构型、多传感器等特点,近年来在众多领域得到了广泛地应用,并发挥着重要的作用。轻型机械臂的一个显著的特点是,在驱动关节中广泛采用传动比大、质量轻和精度高的谐波传动系统。但随着机械臂操作速度的提高和操作载荷的增大,机械臂上的谐波减速器会引起较大的关节柔性,这对机械臂末端的运动精度及其动力学性能产生不可忽视的影响。机械臂关节具有柔性关节特性[1-2],且由之带来了附加的自由度。对于n个连杆的机械臂,在考虑其关节柔性的情况下,需要2n个广义坐标来完整地描述其动力学特性,显然,这是一个刚柔耦合的非线性系统。对柔性关节机械臂实现精确控制已成为近年来机器人控制领域研究的热门课题。奇异摄动法[3]、反演控制法[4]和反馈线性化方法[5]都是柔性关节机器人常用的控制方法。用上述控制方法设计控制器时,是假定所有状态可直接获得,而在实际应用中,由于成本、硬件安装等因素,难以获得所有状态量。例如实际商品化的工业机器人,为了降低成本,只有位置传感器,这种采用位置微分得到的速度信号容易引入高频噪声,且其速度也不精确。因此,为了实现对柔性关节机器人的良好控制,必须引入状态观测器。文献[6]提出了基于位置量的状态观测器;文献[7]给出了具有主从结构的状态观测器,同时具有控制器的功能;文献[8]引入了一种基于电机位置传感器和固连于机械臂上的加速度传感器的柔性关节机械臂状态观测器。以上观测器的设计方法,在很大程度上都依赖于系统模型参数。但是由于测量和建模的不确定性,负载变化及非线性摩擦阻尼干扰的影响,建立精确的机器人动力学模型很困难。
本文应用非线性系统观测器的设计方法,提出了一种基于输出反馈的柔性关节机械臂系统速度状态变量观测器设计。观测器设计不依赖系统的具体数学模型和结构参数,而是应用径向基函数(radical basis function,RBF)神经网络解决模型不确定问题。
2 柔性关节机械臂动力学模型
在考虑连杆转动关节和电机输出轴非线性阻尼的情况下,n连杆柔性关节机械臂动力学[9]行为描述为


Y为系统可测状态变量。
由E(X,u)的表达式可知,E(X,u)为复杂的非线性函数向量,其中包含了非线性阻尼项。同时由于系统的其它参数存在不确定性,如工作负载的变化导致连杆质心和重量的不确定,难以获得准确的连杆惯性矩阵,柔性关节刚度无法精确测量获得等。因此,动力学系统(1)是一个不确定的非线性系统。
假设连杆和电机的输出角度q,p和控制输入u为可测量变量。本文的设计目标是:对于非线性不确定系统(3),设计状态观测器,并快速、准确地实现对速度状态变量,的估计,且对系统的不确定项具有鲁棒性。
3 基于神经网络的观测器设计
具有三层前向网络结构的RBF神经网络,能够逼近任何一个非线性函数。RBF神经网络由输入到输出的映射是非线性的,而隐含层空间到输出层空间的映射是线性的,因而可以大大加快学习速度,并避免局部极小问题,适合于实时控制的要求。因此,在本文的研究中,以具有如图1所示的RBF网络来对不确定函数向量E(X,u)进行逼近[10]。

图1 RBF神经网络结构Fig. 1 The RBF neural network structure


4 仿真分析
考虑二连杆柔性关节机械手,其中连杆为匀质刚性杆。2个关节的刚度系数k1=k2=500 Nm/rad, 各连杆质量m1=m2=2.0 kg,各连杆长度l1=l2=1.0 m,各关节电机转动惯量J1=J2=2.0 kg·m2。动力学模型如式(1),引入的非线性阻尼模型如式(2),各参数的取值如下:

按式(7)设计状态观测器,选取常数矩阵L,使得矩阵A0=A-LC的8个特征根为;103×[-1,-2,-3+i,-3-i,-6,-7+3i,-7-3i,-5];选择隐含层单元个数k=5;权值矩阵自适应律增益为=0.01I;Lyapunov方程A0P+PA0= -Q中Q=50 I ;鲁棒项中ks,i=10(i=1,2,…,2n)。
仿真1 连杆初始状态为0,即X=0; 零输入,即u=0,仿真结果如图2所示。


图2 零输入时的仿真结果图Fig. 2 Simulation results with zero-input
仿真2 连杆初始状态为0,连杆1, 2的期望转角qd=[60,30]T采用简单且不依赖于系统模型的PD控制,其中速度状态变量取自于观测值

式中:控制增益Kv=5×I,Kp=10×I;
仿真曲线如图3所示。
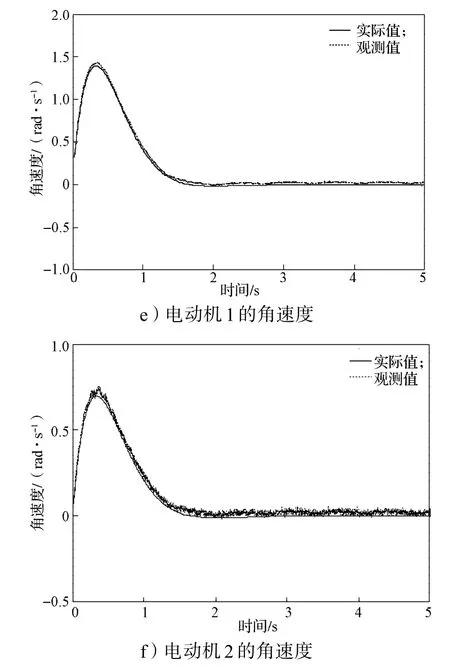
图3 PID输入时的仿真结果图Fig. 3 Simulation results of PID input

以上的仿真结果表明,在不同输入状态下,不基于模型的状态观测器均能对系统状态变量进行相对精确地逼近。当估计的初始值与系统实际值存在误差时,其误差能在很短的时间内得到消除。通过采用饱和函数代替鲁棒项中的符号函数等方法,可以有效地抑制抖动。
5 结语
多连杆柔性关节机械臂系统,由于参数的不确定性和复杂非线性摩擦阻尼的存在,其准确模型无法获得。本文通过构建基于RBF神经网络逼近系统未知动力学模型。在此基础上设计了具有非线性观测器,解决了模型不确定的柔性关节机器人系统的速度状态的观测问题。在考虑连杆端和电机端复杂摩擦阻尼下,以二连杆柔性关节机械臂为例进行仿真分析,结果证明了所提出方法的有效性和正确性。
[1]潘 博,孙 京,于登云. 柔性关节空间机械臂建模、控制与仿真[J].系统仿真学报,2010,22(8):1826-1831.Pan Bo,Sun Jing,Yu Dengyun. Modeling, Control andSimulation of Space Manipulators with Flexible Joints[J]. Journal of System Simulation,2010,22(8):1826-1831.
[2]党 进,倪风雷,刘业超,等. 基于新型补偿控制策略的柔性关节控制器设计[J]. 机器人,2011,33(2):150-155. Dang Jin,Ni Fenglei,Liu Yechao,et al. Design for Flexible Joint Controller Based on a New Compensation Control Strategy[J]. Robot,2011,33(2):150-155.
[3]Yao Han,Xie Wenfang,Ye Cang. A Composite Approach to Adaptive Neural Networks Control of Unknown Flexible Joint Robots[J]. International Journal of Intelligent Control and Systems,2007,12(3):245-253.
[4]赵丹青. 机器人的柔性关节机械手控制研究[J]. 计算机仿真,2011,28(2):244-247. Zhao Danqing. Research on Flexible-Joint Control for Robots [J]. Computer Simulation,2011,28(2):244-247.
[5] 颋
孙敬 ,史士财,王学飞,等. 大型空间机械臂柔性关节的微分几何算法控制器设计[J]. 哈尔滨工程大学学报,2012,33(11):1371-1376. Sun Jingting,Shi Shicai,Wang Xuefei,et al.Controller Design of Large Space Manipulator Flexible Joint Using Differential Geometry Algorithm[J]. Journal of Harbin Engineering University,2012,33(11):1371-1376.
[6]Oh J H,Lee J S. Backstepping Control Design of Flexible Joint Manipulator Using Only Position Measurements[C]// Proceedings of the 37th IEEE Conference on Decision & Control. Tampa:IEEE,1998:931-936.
[7]Gyurkovics va,Svirko Dmitri. A Nonlinear Observer for Flexible Joint Robots[J]. Periodica Polytechnica Ser. Mech. Eng.,2002,46(2):127-137.
[8]Rodriguez-Angeles A,Nijmeijer H. Synchronizing Tracking Control for Flexible Joint Robots via Estimated State Feedback[J]. Journal of Dynamic Systems, Measurement and Control,2004,26(1):162-172.
[9]Lozano R,Valera A,Albertos P, et al. PD Control of Robot Manipulators with Joint Flexibility Actuators Dynamics and Friction[J]. Automatica,1999,35(10):1697-1700.
[10]Ge S S, Lee T H,Tan E G. Adaptive Neural Network Control of Flexible Joint Robot Based on Feedback Linearization[J]. International Journal of Systems Science,1998,29(6):623-635.
[11]刘金琨. 机器人控制系统的设计与MATLAB仿真[M]. 北京:清华大学出版社,2008:31-33. Liu Jinkun. Robot Control System Design and Simulation of MATLAB[M]. Tsinghua University Press,2008:31-33.
[12]武宏伟,戴琼海,王 普,等. 基于神经网络的非线性系统的观测器设计[J]. 清华大学学报:自然科学版,2000,40(3):44-47. Wu Hongwei,Dai Qionghai,Wang Pu,et al. Neural-Network-Based Observers for Nonlinear Systems[J]. Journal of Tsinghua University:Science and Technology,2000,40(3):44-47.
(责任编辑:邓光辉)
A Model-Free Nonlinear State Observer for Manipulator with Flexible Joints
Li Guang,Fu Hao,Yang Yun
(School of Mechanical Engineering,Hunan University of Technology,Zhuzhou Hunan 412007,China)
For the flexible joint manipulator state observer, proposes a model-free nonlinear observer based on neural network in the situation of uncertain model parameters and complex nonlinear friction damping parameter. By radial basis function neural network online approximation, the the neural network weight adaptive law are deduced by Lyapunov stability theory; Through introducing the robust terms to suppress the neural approximation error, accelerates the convergence rate of state observing error; Simulation analysis with different excitation verifies the effectiveness of the proposed method.
flexible joint manipulator;state observer;nonlinear systems;robustness
TP241.3
A
1673-9833(2015)03-0035-06
10.3969/j.issn.1673-9833.2015.03.007
2015-04-06
李 光(1963-),男,湖北孝感人,湖南工业大学教授,博士,主要从事复杂机电一体化系统建模和控制研究,E-mail:liguanguw@126.com
符 浩(1988-),男,湖南益阳人,湖南工业大学硕士生,主要研究方向为柔性机器人控制,E-mail:fuhao318@yahoo.com