鱼雷被动声自导反舰深度设定方法
2015-12-07王桂芹
王桂芹,李 伟,邓 鹏
(海军潜艇学院 导弹兵器系,山东 青岛266042)
0 引 言
由于现代潜艇减振降噪技术的发展,鱼雷被动声自导几乎只能用于打击中高速航行的水面舰船目标。被动声自导系统在搜索目标时,在垂直方向上通常按照设定深度航行。鱼雷被动声自导系统本质上为一部小型声呐,搜索深度的设定,决定了反舰搜索效能的发挥。目前鲜有鱼雷设定深度方面的研究,仅根据部分定性分析或习惯,缺乏定量分析和研究。
被动自导搜索设定深度的研究,前提条件是用于评价搜索效果指标,进而分析影响搜索效果的主要参量。被动自导作用距离是评价自导系统效能的主要指标,主要依据被动自导方程中各项参数进行计算。被动自导方程各项参数中,鱼雷自噪声级和传播损失随深度变化。本文将综合2个要素的仿真分析,进行鱼雷被动自导作用距离仿真计算,作为搜索深度设定的依据,研究典型水文条件下搜索深度设定原则。
1 鱼雷被动声自导期望作用距离计算方法
自导期望作用距离是评价鱼雷自导系统效能最直接有效的指标,通常采用被动自导方程计算被动自导期望作用距离。
被动自导方程为:

式中:SL为声源级;NL为噪声级;AG为自导接收基阵阵列增益;DT为检测阈;FOM为优质因子;TL为传播损失。TL为鱼雷与目标距离r的函数。当FOM≥TL 时,则鱼雷被动自导系统以一定概率发现目标,根据此条件即可计算鱼雷被动声自导期望作用距离r。声源级SL 衡量舰船目标辐射噪声,与目标类型、尺寸、航速等因素有关;阵列增益AG 由自导基阵自身参数决定;噪声级NL 反映自导系统的干扰,鱼雷被动自导工作时,干扰包括环境噪声、鱼雷自噪声和其他反鱼雷手段的干扰。鱼雷自导系统工作频率较高,通常在20 kHz左右,在此频率上,环境噪声主要为来自海面的风雨噪声,噪声谱级仅为30 dB[1]左右,远小于鱼雷自噪声,因此不考虑反鱼雷手段的前提下,被动自导系统干扰主要为鱼雷自噪声。在鱼雷航速超过20 kn 时,在自导工作频率上,鱼雷自噪声主要以螺旋桨空化噪声为主[2]。螺旋桨空化噪声经由海水、海底散射或海面散射,传播到自导基阵形成自噪声。

图1 鱼雷自噪声形成机理Fig.1 Torpedo self-noise formation
鱼雷自噪声包括体积散射噪声和界面散射噪声,文献[3-4]对鱼雷自噪声模型进行研究,但假设条件中认定鱼雷接收基阵无指向性,这与实际情况不符合。因此,对其进行修正,体积散射自噪声NLV和界面散射自噪声NLS计算模型为:

式中:SV为海水体积散射系数(通常为-90 dB~-70 dB)[5];SNL为鱼雷辐射噪声级;α为海水吸收系数;rT为自噪声仿真计算距离;h为鱼雷距离海面或海底深度,m;μ为界面散射系数,可采用Lambert 定律计算。

式中:μ0为界面散射常量;θ为入射角;φ为散射角。Ψ为反映被动自导系统接收指向性的参数。设鱼雷被动波束为理想波束情况,即立体波束角内的接收指向性为1,其余为0,则:

式中:ω为鱼雷基阵接收水平波束角宽度;φ为鱼雷基阵接收垂直波束角宽度。检测阈DT为:

其中R0.5为自导检测概率为0.5 时接收机信噪比门限。鱼雷被动自导搜索目标时,尚未发现目标,信号检测通常采用能量检测方式。若目标噪声信号幅值与环境噪声幅值均服从高斯分布,且被动自导系统为平方-积分处理方式,则自导接收机输出信号与噪声幅值服从瑞利分布,根据文献[6]:

式中:pf为虚警概率;Δf为带宽;Δt为积分时间;erfc为补偿误差函数;erfc-1为其反函数。

传播损失TL 由海区水文条件、自导频率等因素决定。由于鱼雷自导工作频率较高,通常在20 kHz 以上,采用高斯束射线Bellhop模型计算传播损失TL。根据自导方程各项的仿真计算,将FOM与TL(r)比较,即可计算鱼雷设定深度不同时鱼雷被动自导反舰期望作用距离,将其作为鱼雷深度设定的依据。
2 鱼雷被动声自导反舰深度设定仿真分析
2.1 鱼雷自噪声仿真计算
设海深120 m,海水吸收系数α为6 dB/km,弱不平整海底,海底散射系数μ1为-20 dB,海况3级,海面散射系数μ2为-21 dB,体积散射系数SV为-80 dB,鱼雷工作深度h为25 m,声自导水平波束角±40°,垂直波束角± 12°,鱼雷辐射噪声级SNL为108 dB,则在5~1 000 m的体积散射自噪声、海面散射自噪声、海底散射自噪声和鱼雷自噪声仿真结果如图2所示。

图2 鱼雷自噪声仿真分析结果Fig.2 Torpedo self-noise simulation and analysis
从图2 可看出,鱼雷自噪声主要海底和海面散射产生,而体积散射自噪声可忽略。仿真距离超过10 m 后,鱼雷自噪声趋于稳定。鱼雷工作深度取值不同时的仿真也表明,鱼雷自噪声主要为海面和海底散射自噪声。
下面对鱼雷自噪声随深度变化进行分析。将鱼雷深度在5~115 m 离散取值,自噪声仿真结果如图3所示。由图3 可以看出,鱼雷在67 m 深度航行时,自噪声最低,仅为58.75 dB;鱼雷靠近海面或者海底时,由于界面散射的影响,自噪声较大,在5 m和115 m 时,自噪声分别达61.91 dB和60.92 dB,超过67 m 深度的自噪声为2~3 dB,因此,有必要研究自噪声影响下鱼雷被动自导搜索深度如何设定。
2.2 鱼雷被动声自导期望作用距离仿真与分析
设水面舰船等效声学中心深度为5 m,鱼雷自导工作频率为25 kHz,AG =5 dB,在等声速、负梯度、正梯度和负跃层4 种典型声速分布及该条件下的传播损失分布,以及不同深度下鱼雷被动声自导期望作用距离如图4~图7所示。
图4为等声速条件下的被动自导作用距离仿真。可以看出,67 m 深度上鱼雷自导作用距离最大,可达2.15 km,在靠近海面和海底深度上,自导作用距离仅1.7 km 左右。这是由于在等声速条件下传播损失在垂直方向上分布比较均匀,则鱼雷被动自导最佳搜索深度主要由自噪声在垂直方向上的分布决定。67 m 深度同时也是等声速条件下鱼雷自噪声最小的深度。
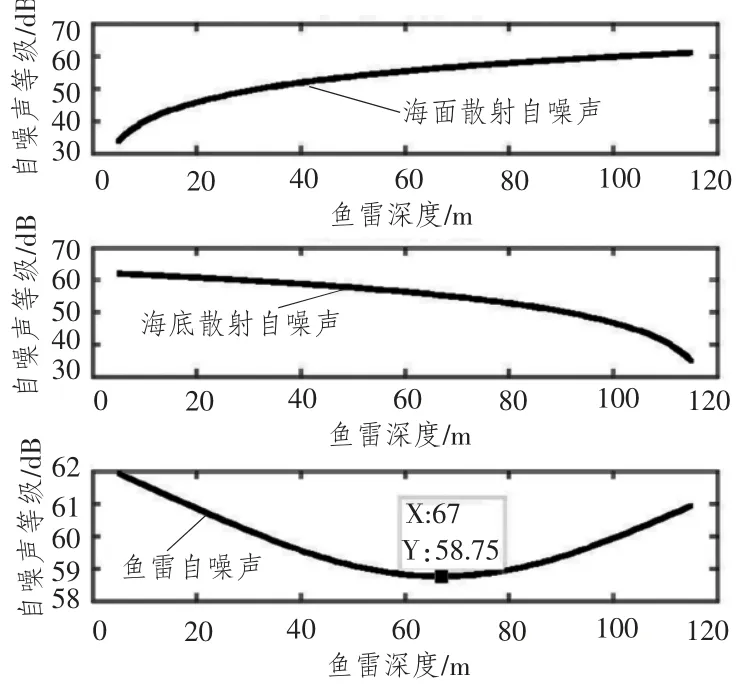
图3 鱼雷自噪声随深度变化情况Fig.3 Torpedo self-noise changing with depth

图4 等声速条件下的被动自导作用距离Fig.4 Passive homing system detection range in invariable SSP
图5为负梯度条件下的被动自导作用距离仿真。可以看出,负梯度条件下,70 m 深度上自导作用距离最大,约2.1 km。而在靠近海面和海底深度上,自导作用距离仅1.65 km和1.77 km 左右。这是由于负梯度条件下,声线往海底方向弯曲,使得大于声源深度上传播损失较小,而鱼雷自噪声在67 m 深度上最低,鱼雷自噪声和传播损失在深度上的分布共同决定了鱼雷被动自导最佳搜索深度略大于自噪声最低深度。

图5 负梯度条件下的被动自导作用距离Fig.5 Passive homing system detection range in reverse gradient SSP
图6为正梯度条件下的被动自导作用距离仿真。可以看出,正梯度条件下,靠近海面的深度上自导作用距离较大,最大值2.29 km 出现在10 m深度。而在靠近海底深度上,超过自导作用距离仅1.67 km。这是由于声速梯度达0.175 s-1,正梯度条件下,声线往海面方向弯曲,在接近海面深度形成表面声道。传播损失成为影响被动自导搜索深度的主要因素。同时可以看出,29 m 深度上作用距离仅1.855 km,这是由于该深度上形成声影区,进行鱼雷深度设定时应避开此深度。
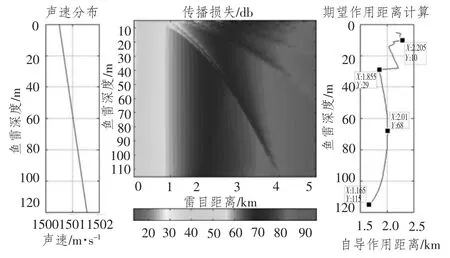
图6 正梯度条件下的被动自导作用距离Fig.6 Passive homing system detection range in positive gradient SSP
图7为负跃层条件下的被动自导作用距离仿真,跃层深度在9~20 m,声速梯度为-1.636 s-1。可以看出,负跃层条件下,被动自导作用距离在最靠近海面5 m 深度上最大,约2.2 km;在19 m 左右的跃层深度上,作用距离仅1.825 km;在靠近海底深度上左右距离最小,仅1.57 km。在跃层以上,由于鱼雷与目标处于声跃层的同侧,传播损失远小于跃层以下,因此作用距离最大。跃层以下深度上,由于跃层的影响,自导作用距离总体上小于跃层以上。但由于跃层以下为正声速梯度,声线向海面弯曲,使得靠近海底深度上自导作用距离最小。同时,由于跃层以下正声速梯度和67 m 深度上自噪声最低,使得跃层以下自导作用距离最大值1.94 km 出现在69 m 深度。
3 结 语

图7 负跃层条件下的被动自导作用距离Fig.7 Passive homing system detection range in negative thermocline SSP
仿真分析结果表明,在4 种典型声速分布条件下,由于鱼雷自噪声和传播损失在水平深度上的差异,不同深度上的被动自导作用距离相差30%~40%。因此,鱼雷被动声自导反舰搜索时,搜索深度设定严重影响鱼雷被动自导搜索效果,进而影响鱼雷作战效能的发挥。在进行鱼雷搜索深度参数设定时,除了鱼雷航行深度限制、作战训练任务要求等约束,应综合考虑海面和海底散射为主要因素影响下的鱼雷自噪声,海区声速梯度条件影响下的传播损失在深度上的分布。
大量仿真分析表明,在等声速条件下,鱼雷被动声自导反舰最佳搜索深度通常为自噪声最低深度;负梯度条件下,鱼雷设定深度应略大于自噪声最低深度;正梯度条件下,满足鱼雷最小极限深度条件的前提下,鱼雷设定深度应选择靠近海面的深度,同时注意避开鱼雷被动声自导盲区;在负跃层条件下,鱼雷设定深度应在跃层上方,若战术或其他条件限制下鱼雷不事宜在跃层以上搜索时,应选择跃层以下自噪声最低深度附近。
[1]PAUL C E,蔡志明,译.水声建模与仿真[M].北京:电子工业出版社,2005:225-239.
[2]徐园园,王明洲,蒋继军.基于声散射的鱼雷自噪声场空间特性[J].舰船科学技术,2013,35(9):130-133.
[3]徐园园,王明洲,蒋继军.基于双基地模型的鱼雷自噪声仿真预报[J].舰船科学技术,2012,34(12):24-29.
[4]徐园园,王明洲,蒋继军.基于声散射模型的鱼雷自噪声特性分析及仿真预报[J].鱼雷技术,2013,21(2):105-109.
[5]笪良龙.海洋水声环境效应建模与应用[M].北京:科学出版社,2012:143-151.
[6]MICHAEL A A.Principles of sonar performance modeling[M].Berlin:Springer & Chichester:Praxis,2010:53-122.
