基于正态DS证据理论的机载LIDAR数据地物分类方法
2015-12-06冯裴裴杨风暴李大威梁若飞
冯裴裴, 杨风暴, 卫 红, 李大威, 梁若飞
(1. 中北大学信息与通信工程学院,山西 太原 030051;2. 雷丁大学系统工程学院,英国 雷丁 RG6 6AU)
基于正态DS证据理论的机载LIDAR数据地物分类方法
冯裴裴1, 杨风暴1, 卫红2, 李大威1, 梁若飞1
(1. 中北大学信息与通信工程学院,山西 太原 030051;2. 雷丁大学系统工程学院,英国 雷丁 RG6 6AU)
针对现有方法无法满足机载激光扫描与测距系统(LIDAR)数据地物分类时对算法精度和速度需求的问题,提出了一种基于非下采样剪切波(NSST)和正态DS证据理论的LIDAR数据快速地物分类方法。首先,利用NSST对LIDAR数据源图像进行多尺度分解,对得到的各层高频图像进行中值滤波处理,并进行逆变换合成。其次,构建正态概率分配函数及模糊类别,对LIDAR数据进行信任分配,并进行合成与决策。实验证实,该方法的分类精度达到86.12%,运行时间仅为0.46 s,在保证快速的基础上有效地提高了分类算法的精度。
地物分类;机载激光扫描与测距系统;非下采样剪切波变换;正态DS证据理论
TP 751.1
机载激光扫描与测距系统(light detection and ranging,LIDAR)以其空间分辨率高、数据源丰富、可提供地表三维信息等优势,在气候、环境监测、森林建模、道路检测、地物分类等方面具有广泛的应用[1-2]。随着机载LIDAR技术的发展,测量的区域地形更加复杂,LIDAR数据的密度也在不断增加,制约着快速分类算法的准确性,因此构建一种快速、高精度的LIDAR数据分类方法具有重要的意义。
对于现有的LIDAR数据地物快速分类方法,如刘修国等[3]提出的距离影像与对比度纹理相结合的建筑物快速提取方法,其准确度受滤波窗口选择的限制,难以有效将树木与建筑的混淆区域分开;刘志刚[4]利用数学形态学中开运算的特性,采用逐渐扩大滤波窗的高差阈值的方法实现道路的提取,需要人工参与确定高程的滤波范围才能达到较好的精度。正态(Dempster-Sharer,DS)证据理论利用区间估计来描述不确定信息,可以很好地解决LIDAR数据地物分类时产生的不确定性问题,不需要进行样本训练,运行速度快,因此得到广泛的应用。Cao等[5]使用DS证据理论与马尔科夫随机场相结合的方法进行LIDAR数据地物分类,使用线性函数作为类间阈值,减少了分类时不确定性的影响,但由于马尔科夫随机场需要进行样本训练,导致算法运行时间过长。Rottensteiner等[6]使用DS证据理论处理LIDAR数据与多光谱图像融合的建筑物检测问题,首次提出了将类间阈值设定为三次抛物线,得到了较好的分类结果。
综上所述,DS方法是一种有效的LIDAR数据的快速地物分类方法,但以往方法只是将类间阈值的不确定性用软阈值来表示,而没有从根本上解决类别模糊点的分类问题,导致分类结果的精度无法达到预期。如何将类别模糊点的类别归属进行有效地量化及分配是构建快速、高精度LIDAR数据分类方法的关键。为此,本文提出的基于非下采样剪切波变换(non-subsampled shearlet transform,NSST)和正态 DS证据合成的 LIDAR数据地物分类方法,利用NSST对数据源进行滤波处理,并结合模糊分布构建了正态信任分配函数,定义了模糊类别,解决了类别不确定性点的分类问题。
1 特征空间
本文所使用的LIDAR源数据有首次回波高程图像DSMFE、末次回波高程图像DSMLE、强度图像IN、可见光图像RGB、近红外图像NIR。另有两种衍生图像由以下公式得到:

HD(height difference)为首末次回波高程差图像,可根据树木的透射特性用于区分树木与其他类别;NDVI(normalized difference of vegetable index)为植被归一化指数图像,是用于识别植被的常用特征。各个特征区分的互补集合在表 1中列出,其中,C代表建筑,T代表树木,G代表草地,S代表地面。
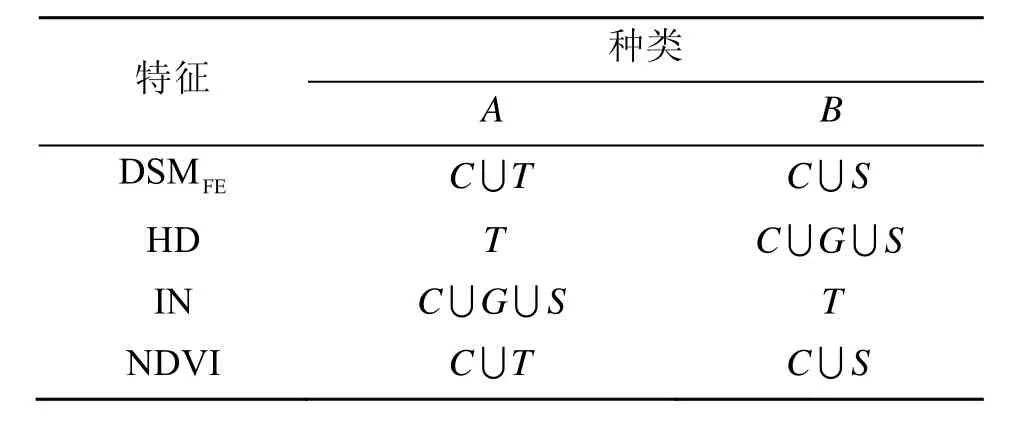
表1 各个特征区分的互补集合
2 本文方法
2.1非下采样剪切波
NSST是一种非正交变换,其避免了剪切波变换中的下采样操作,而将非下采样塔式变换和非下采样方向滤波器组相结合[7]。变换后各尺度上各方向子带的大小都与原图像相同,使图像的冗余度得到了很大地提高,并具有了平移不变性。近年来剪切波变换在图像融合、图像去噪及目标边缘检测等图像处理领域中已经取得了一定的研究成果[8-9]。本文对LIDAR各源数据进行NSST变换分解,分解层数设定为3层,方向数为6,对各层高频进行中值滤波去噪,并进行逆变换合成,为后期分类提供干净的数据。
2.2正态证据理论
DS证据理论常应用于多传感器数据的融合[10]。分类问题中输入数据分属于 n个独立且互不相交的类别(或元素)中,其集合 Θ称为识别框架,由识别框架Θ的所有子集组成的一个集合称为Θ的幂集,记作 2Θ。在DS理论中,基本信任分配函数m(A)是一个从集合 2Θ到[0,1]的映射,A表示识别框架Θ的任意子集,记作A∈2Θ,且满足m(Ø)=0,,其中Ø表示空集。m(A)可由函数根据传感器得到的数据计算得到,如BPA函数。框架Θ中的集合A,只要有m(A)>0,则称A为焦元。
不确定性数据可以通过分配一个非零的概率函数给两个或以上类别来处理。若已知p个数据源,每个数据源i有概率分配函数mi(Bj),且有0≤i≤p,Bj∈2Θ。对于每个集合A∈2Θ,DS理论允许多个数据源的基本概率分配函数进行合成:

式(3)中分母中的求和表示各个证据之间的冲突程度。Sup(A)和Pls(A)可根据合成基本概率分配函数得到。最后,需要定义一个决策规则。
决策规则的定义方法有多种,本文选用正交信任函数最大值作为决策规则,其定义如式(4):

2.3正态信任分配函数
信任分配函数的定义是 DS证据理论应用中最重要的一步。本文结合模糊分布[11]中的正态分布提出了正态信任分配函数,定义如下:

不同于基本的信任分配函数,本文增加了一个A∪B类别,用来表示A类与B类之间模糊的类别,A∪B中元素不能完全确定属于A类或者B类。用MA∪Bi(x)表示当数据源i的输出是x时,图像像素属于类A∪B的概率。当输入x小于阈值 h12时,MAi(x)和MA∪Bi(x)可根据式(5)和式(7)求出,而表示B类别概率的MBi(x)应为0,且满足公式m(A∪B)=1−m(A−m(B),即MA∪Bi(x)=1−MAi(x)−MBi(x)。同理,当输入大于阈值h12时,MAi(x)为0,MBi(x)和MA∪Bi(x)可根据式(6)、(7)求出。
正态信任分配函数的曲线在图1中给出。为了避免不确定数据的影响,本文中选取 P1=2%,P2=98%来代替0和100%。与基本信任分配函数相比,正态信任分配函数的优势有:
(1) 定义了模糊类别A∪B。由于类别间阈值无法确定,导致在实际分类中像素值在 h1和 h2之间的像素点无法确定地进行分类,将这些点归为模糊类别更加准确。
(2) 不同于基本DS方法,考虑到类别不确定性点的分布情况,本文方法在两种类别之间使用正态分布的软阈值,将DS理论处理不确定性问题的优势发挥得更好。

图1 正态信任分配函数曲线
3 实验仿真
3.1实验数据
本实验中所使用的LIDAR数据和对应的配准数据由TopoSys GmbH提供,所有的图像均经过预处理并配准到0.5 m的空间分辨率,真实数据由人工绘制生成,实验在Matlab R2013a中进行。为说明本文方法的效果,使用基本DS方法处理同一组LIDAR数据,并将实验结果与本文所提出方法结果作对比。图2和图3为本文所使用的两组LIDAR数据。
3.2定性分析
如图 4所示,两组实验数据的分类结果中,本文所提出的正态DS合成方法与基本DS方法相比,实验结果更接近真实值。草地区域中主要出现的混淆问题是草地与空地的混淆,这主要由客观环境所导致,草地本身具有间隙与不连贯性,但在实际地物分类中,更希望得到符合人眼观测特性的大片连贯区域,本文方法所得到的结果相比基本 DS方法更加连贯、噪点少。另外,基本DS方法中树木与建筑分类结果的混淆严重,这是由于树木过于茂密而导致激光回波无法穿透,使得用于区分树木的HD特征本身存在错误,这些点应属于模糊类别(见图4(b)、(e)),而本文方法通过对这些类别模糊点进行概率分配以及合成克服了这个问题(见图4(c)、(f))。

图2 LIDAR数据1(图像大小为220×220)

图3 LIDAR数据2(图像大小为200×150)

图4 分类结果
3.3定量分析
表2和表3分别为利用本文方法与基本DS方法对数据1与数据2进行分类的结果准确率对比,从表中可以看出,由于有效处理了草地与空地、建筑与树木的混淆,本文所提出的正态DS证据合成方法在建筑、树木和草地区域的分类准确率均得到了较大提升,但对于空地类别的准确率还有待提升,两个数据集平均准确率的提升分别达到了5.27%和3.52%。
表 4为本文方法与文献[5]中各方法处理相同LIDAR数据时运行速度的比较。从表中可看出,文献[5]中速度最快的方法 ICM-MRF方法的运行时间为 13.16 s,而本文方法的运行时间仅为0.46 s,时间缩短了96%。在保证较高的准确率的同时,有效地缩短了运行时间。

表2 数据1分类结果准确率对比(%)

表3 数据2分类结果准确率对比(%)

表4 几种方法运行时间对比(s)
4 结 论
本文提出了一种NSST与正态DS证据合成方法相结合的LIDAR地物快速分类方法,利用NSST对LIDAR图像进行滤波处理,去除了高频部分的噪声,为后续处理提供了干净的数据;构造了正态信任分配函数,更符合灰度分布与地物类别间的对应关系;构造了模糊类别,解决了类别不确定点的分类问题。实验证实该方法在快速的前提下有效提高了算法的分类准确率,为LIDAR数据地物分类领域提供了一种新的思路。
[1] Yan W Y, Shaker A, El-Ashmawy N. Urban land cover classification using airborne LIDAR data: a review [J]. Remote Sensing of Environment, 2015, 158: 295-310.
[2] Eisenkeil F, Schafhitzel T, Kühne U, et al. Real-time classification of ground from LIDAR data for helicopter navigation [J]. Signal Processing, 2013, 8745(12): 1-14.
[3] 刘修国, 张靖, 高伟, 等. LIDAR点云数据中建筑物的快速提取[J]. 地球科学—中国地质大学学报, 2006, 31(5): 615-618.
[4] 刘志刚. 基于 LIDAR技术的道路信息提取方法探究[J]. 交通信息与安全, 2011, 29(2): 121-124.
[5] Cao Y, Wei H, Zhao H, et al. An effective approach for land-cover classification from airborne lidar fused with co-registered data [J]. International Journal of Remote Sensing, 2012, 33(18): 5927-5953.
[6] Roteensteiner F, Trinder J, Clode S, et al. Using the Dempster-Shafer method for the fusion of LIDAR data and multi-spectral images for building detection [J]. Information Fusion, 2005, 6: 283-300.
[7] 韩绍程, 张红颖. 基于 QR分解的彩色图像自嵌入全盲水印算法[J]. 图学学报, 2015, 36(3): 345-351.
[8] Yang F B, Ji L E, Liu S R. et al. A fast and high accuracy registration method for multi-source images [J]. Optik-International Journal for Light and Electron Optics, 2015, 126(21): 3061-3065.
[9] 韩绍程, 张兆宁. 一种基于子采样的混合域稳健零水印算法[J]. 图学学报, 2013, 34(3): 20-24.
[10] 杨风暴, 王肖霞. D-S证据理论的冲突证据合成方法[M]. 北京: 国防工业出版社, 2010: 1-35.
[11] 胡宝清. 模糊理论基础[M]. 武汉: 武汉大学出版社, 2004: 291-300.
A Land-Cover Classification Method for Airborne LIDAR Data Based on the Normal DS Evidence Theory
Feng Peipei1,Yang Fengbao1,Wei Hong2,Li Dawei1,Liang Ruofei1
(1. School of Information and Communication Engineering, North University of China, Taiyuan Shanxi 030051, China; 2. School of Systems Engineering, University of Reading, Reading RG6 6AU, UK)
In view of the existing methods cannot meet the needs for accuracy and speed during classification, this paper proposes a fast land-cover classification method for light detection and ranging (LIDAR) data based on the non-subsampled shearlet transform (NSST) and normal Dempster-Sharer (DS) evidence theory. At first, the NSST is used to decompose LIDAR source data in multi-scale, and the median filter is used to reduce the noise in high frequency image from each layer, then inverse transformation and fuse the images. Secondly, the normal probability distribution function is built and the mass function of LIDAR data is distributed, and synthesis and decisions are made. Experiment confirmed that the classification accuracy of the proposed method in this paper is 86.12%, while the running time is only 0.46 s. So this is a fast and high precision land-cover classification method.
land-cover classification; light detection and ranging; non-subsampled shearlet transform; normal DS evidence theory
A
2095-302X(2015)06-0926-05
2015-06-10;定稿日期:2015-08-13
山西省研究生教育创新资助项目(2015SY61)
冯裴裴(1991–),男,辽宁本溪人,硕士研究生。主要研究方向为LIDAR数据处理。E-mail:nucfengpeipei@163.com
杨风暴(1968–),男,山西临汾人,教授。主要研究方向为红外图像处理。E-mail:fengbao_yang@163.com
