基于以太网的舰船动力信息系统构建与应用
2015-12-04朱堂勋
朱堂勋
(重庆电子工程职业学院,重庆401331)
0 引 言
舰船信息交换一般分为2个方面:首先是船舶外部通信,其担负的功能是提供船舶上人员或装备与外界的通信功能;其次是船舶内部通信,其担负的功能是舰桥中央控制系统和船舶各个分系统之间的信息传递。近年来,对于海上通信领域的研究成果较多,通过应用卫星通信网、海上无线自组网等技术,取得了较大的突破;然而,对于船舶内部通信的研究成果较少,这主要是因为传统船舶的信息化水平不高,并不需要特殊的通信手段保障各个部分之间的信息交换和传输。但是,随着造船和航运业的发展,当代船舶的自动化程度和信息化程度均得到了极大提升,随之而来对于各种信息化设备之间的信息传递,也提出了更高的要求。船舶动力系统作为整个船舶的核心,为其提供行驶动力和工作电力,传统的现场总线通信方式已经逐渐无法满足日益增长的信息交换需求。针对这种情况,本文对动力系统的通信需求进行了研究和分析,将成熟的100 M 以太网技术应用于舰船动力信息系统中,设计了船舶内部通信网络,提升了船舶内部信息交换的效率和可靠性。
1 舰船动力系统通信需求
为了研究和分析方便,本文将船舶动力系统细分为推进系统和供电子系统,其总体框架如图1所示。
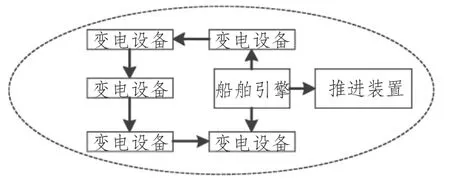
图1 船舶动力系统总体框架Fig.1 The architecture of ship power system
通过船舶引擎,一方面向推进装置提供动力,控制船舶的航向和航速,另一方面通过船舶电力系统中分布于船体各个部分的变电设备,向船体提供电力。由于其担负的重要功能,因而要求通信过程必须实时和可靠,将动力系统的通信需求总结如下。
1.1 较高的通信速率
随着船舶动力系统的快速发展,为了保证船舶引擎的稳定运行和电力供应的实时监控,大量的智能电子检测设备得到应用,这些设备产生的数据和信息量,远远超过了传统机械监测设备所产生的,因而庞大的数据量需要较大的带宽来保证传输速率。
在当前船舶使用的通信手段中,如CAN、DeviceNet,Modbus和Profibus 等,其提供的带宽非常有限。最低的DeviceNet 仅仅能够提供512kbps的传输速率,而最高的Profibus 也只能提供12 Mbps的传输速率,远远无法满足当前的通信需求[1-2]。
同时,随着船舶各项设备和系统的信息化提高,需要传递的信息种类也大大增多,在传统动力系统中,往往只有温度、震动、电压等几类数据,但随着各种现代化监测设备的使用,需要监测和产生更多种类的数据才能掌握整个动力系统的运行态势,因而对于传输带宽也有着较高的要求。
1.2 实时性
由于船舶动力系统的重要性,要求数据传输的实时性要尽可能的高,以便及时对各种异常情况进行反应。通常情况下,电力系统的信息需要在4 ms内传输完毕,而推进系统的信息则需要在0.1~1 ms内传输完毕。这就要求通信网络中的交换节点需要具有较高的吞吐率和转发速率。
1.3 容错性
海上环境比较恶劣,各种监测设备需要面对潮湿、腐蚀等挑战,极易产生干扰和错误。对于这种情况,要求信息系统具备一定的容错性,一方面对于系统异常具备灵敏的识别能力,另一方面对于错误信息和干扰具备一定的过滤和容错能力。
1.4 可靠性
在海上航行时船舶极易遇到恶劣海况,船体的震动和颠簸可能会对通信网络造成损坏,为了避免因信息交换网络损坏导致对于供电和推进系统的失控,必须要求通信网络具有较强的可靠性,具有冗余、灾备等功能,在物理网络遭到一定损坏的情况下,仍能满足各个系统的通信要求。
针对以上需求,我们看到使用100 M 以太网技术能够满足船舶信息交换对于带宽和实时性的要求,同时将针对船舶的实际场景,设计相应的通信网络,实现较好的容错性和可靠性。
2 舰船动力信息系统设计
2.1 以太网技术标准分析
当前有多种以太网标准可以使用,其中主流的3 种为Ethernet/IP,Modbus/TCP,Profinet- IRT[3]。它们之间的性能评价如表1所示。
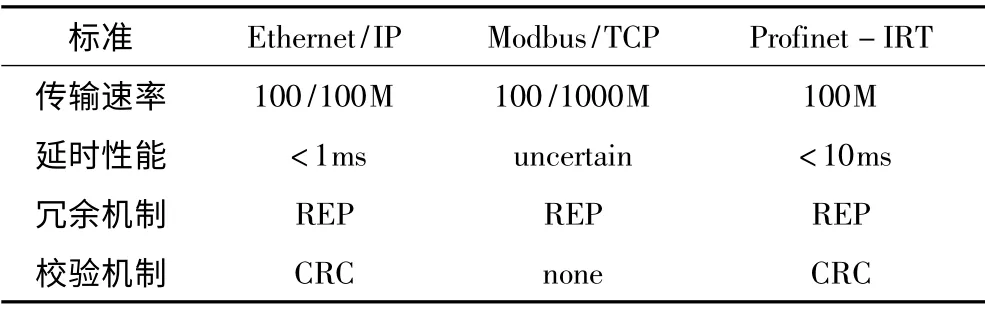
表1 不同以太网标准对比Tab.1 Comparison of ethernet standards
根据第1 节中对于通信需求的分析,在本文中将采用Ethernet/IP 作为信息系统的实现技术。
Ethernet/IP 是当前广泛使用的成熟技术,其最高速率能够达到10/100 Gbps,在ASIC 芯片中实现时,能够达到10/100 Mbps的传输带宽[4],能够满足舰船动力系统的信息传输需求。同时,与其他标准相比,在以中型船舶为标准的局域网络中,信息传输的时延不超过1 ms,能够满足较好的实时性。
弹性以太网协议 (Resilient Ethernet Protocol,REP)保证了在以太网中能够具备较好的冗余性能,同时循环冗余校验(CRC)机制,能够有效减少误码和错误,具备一定的容错性。
同时,由于Ethernet/IP 是当前应用最为广泛的协议,市场上相关产品丰富,实现难度较小,采用这一标准,在实际应用过程中具有较好的经济性。
2.2 供电子系统网络设计
本文供电子系统特指的是为除了推进系统外,船舶各项功能供应电力的系统。其主要分为骨干层,分布层和接入层3个层次。其中骨干层主要是船体内部各个系统信息传输的主干道,负责汇聚各个设备的传输信息到舰桥的中央处理终端;分布层主要用于为甲板上的建筑和设备提供通信链路;接入层则主要用于连接特定的智能设备、终端等。其中骨干层如图2所示。
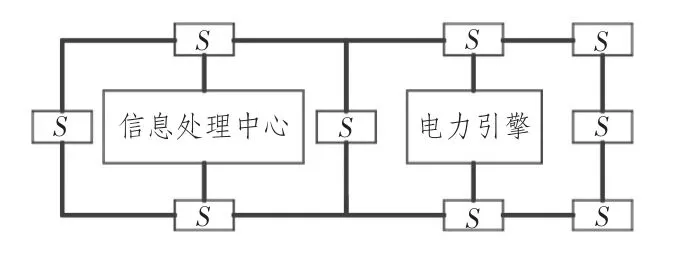
图2 骨干层网络设计Fig.2 Design of backbone network
在图2 中,S 为以太网交换机,连接线表示连接的双绞线。骨干层网络中的流量主要来自电力引擎和各个交换机节点流入的流量,是整个系统流量汇聚的地方,因而其具备较高的传输速率和完备的冗余机制。信息处理中心是设置在舰桥中的信息处理终端,是整个动力信息系统的核心,汇总收集的信息并进行处理;电力引擎为船舶提供电力。因此,信息处理中心和电力引擎,组成了骨干网络的主要部分,它们之间分布有若干个交换机节点,这些节点形成冗余环状拓扑,同时运行有生成树协议,可以有效防止信息环路,确保通信时延,当某条链路遭到破坏或阻塞时,来自电力引擎的信息仍然能够被传递到信息处理中心。
在骨干层网络之外,还有若干分布层网络,这些网络的结构如图3所示。
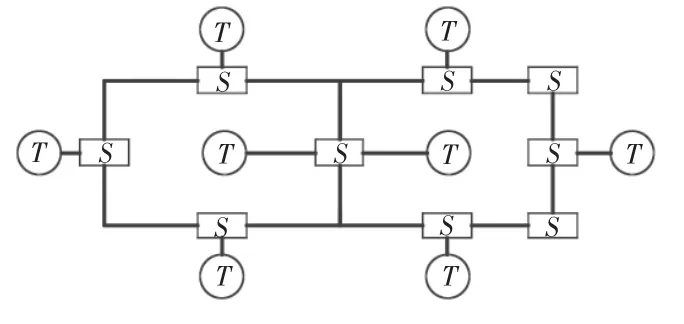
图3 分布层网络设计Fig.3 Design of distributed network
在图3 中,S 为分布层网络和骨干层网络相连的交换机节点,T 为变电设备。分布层的作用主要是通过变电设备与各个用电设备相连,将安装在具体用电设备的多种智能监测终端传输的数据,汇聚之后传输给骨干网络,进而送给信息处理中心进行处理。
在分布层网络之外,则是在具体用电设备中的接入层网络,该网络结构如图4所示。
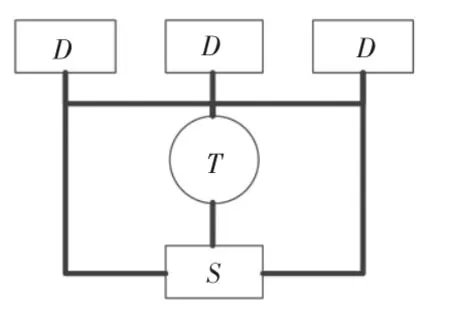
图4 接入层网络设计Fig.4 Design of access network
在图4 中,S 为以太网交换机节点;D 为具体用电设备的智能监测装置。在实际应用中,具体的监测数据有这些装置产生,并通过分布层网络进入骨干层网络,最后被传输到信息处理中心进行处理。
2.3 推进子系统网络设计
推进子系统与供电子系统的区别在于,前者处理的信息主要由机械和非智能设备产生,需要进行信息格式的转换和特殊的处理机制,而后者由于大量智能电力监测设备的使用,处理的往往是结构化和标准化的数据,根据这2 种传输场景的不同,有相关研究成果提出,在推进子系统网络中采用SERCOS III[5]标准,在供电子系统中采用Ethernet/IP 标准,以取得更好的时延性能,然而在对两者的工作机制和协议栈进行研究之后,发现以下问题:首先,二者虽然均支持802.3 以太网,然而其在传输的信元格式等方面具有较大的差异,实现2 种网络的连接仍然需要单独的转接设备,为系统的实现带来了困难;同时,二者虽然均能达到10/100 M的传输速率,然而传输格式、数据包大小的差异,仍然使得2 种网络的速率匹配产生问题,造成整个通信链路的瓶颈或故障。基于以上考虑,在推进子系统中,将仍然采用Ethernet/IP 标准作为实现技术。
与供电子系统网络不同的是,推进子系统并不需要在整个船体布网,而仅仅需要围绕船舶引擎和推进系统进行布网即可,其基本结构如图5所示。

图5 推进子系统网络设计Fig.5 The design of propelling system
在图5 中,D 为在船舶引擎和推进系统中安装的智能监测和控制设备,一方面实时监测引擎和推进系统的震动、压力、转速等运行状况;另一方面能够根据上层系统的指令给与其及时的控制。
推进子系统网络的范围较小,主要集中于船舶引擎和推进系统,由于网络运行的环境较为复杂多变,因而对其可靠性提出了较高的要求。在图5 中,采用交换机冗余备份的方案,确保任意链路或节点损坏,并不会影响到整个网络的信息传输。
2.4 系统网络连接设计
通过以上分析和设计,确定了各个子系统的网络规划,然而,在船舶内部各个网络之间相互融合,而非互相孤立,从而能够实现各个部分数据和信息的互联互通,因而还需要采用科学的规划和设计,将供电子系统和推进子系统的网络连接起来,形成“船域网”,一方面能够实现各个系统对信息处理中心的信息传输;另一方面也能够实现通信网络的冗余备份,提高船舶动力信息系统的可靠性。
船域网的截面图如图6所示。
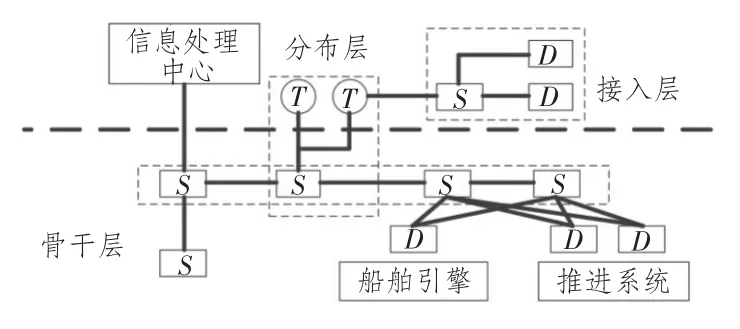
图6 船域网结构图Fig.6 The architecture of ship-area network
在图6 中,各个部分的表示方法与上文相同,将供电子系统网络和推进子系统网络融合,即形成了船域网。接入层网络在具体的用电设备和推进系统内部,负责将各个构件和传感器产生的数据进行收集和汇聚;分布层网络将来自各个用电设备和推进子系统的数据汇总,并连接骨干网,最终通过骨干通信网将数据递交信息处理中心。
3 仿真与验证
3.1 传输带宽与时延性能仿真
根据本文提出的网络规划方案,将在OPNET 中进行实际性能仿真,检验系统提出的方案能否满足船舶动力信息系统在传输速率和时延上的要求。
在仿真过程中,采用能够支持IEEE 802.1p 标准的交换机模块,这种交换机能够支持QoS 服务[6-7],基于这一服务可以将不同种类的消息分级。在仿真中采用3个优先级:优先级3 表示需要实时传输的数据,优先级2 表示系统运行相关的控制和状态信息,优先级3 表示尽力而为传输的信息。
则在仿真过程中,将对优先级3的流量进行测试和观察。表2 显示了不同流量的发送频率。

表2 流量发送频率Tab.2 The Frequency of traffic in the simulation
在仿真过程中,将根据本文提出的网络规划方案设计相应的拓扑,以信息处理中心为基准,测试各种流量的时延和带宽性能,在OPNET 中仿真的拓扑如图7所示。

图7 仿真拓扑图Fig.7 The topology of the simulation
根据测试的结果,在信息处理中心端,获得吞吐量不少于25 Mbps,同时对于优先级为3的实时流量,其时延不超过5 ms,测试的时延结果如图8所示。

图8 优先级3 流量时延Fig.8 The delay of traffic with priority 3
仿真结果证明,本文设计的网络能够满足在通信速率和时延性能上的需求。
3.2 网络自愈性能仿真
为了测试网络自愈性能,本文涉及了相应的测试环境,其由若干个运行REP的以太网交换机节点组成,形成冗余环状链路,测试当链路中断之后,网络能够在多长时间内找到新的通信路径,并恢复通信。测试网络拓扑如图9所示。

图9 网络自愈仿真拓扑Fig.9 The topology of network healing
在测试的过程中,运行有由S6 发往Sink,和Sink 发往S3的流量,在测试中将依次断开S1~S6之间的互联链路,然后记录网络利用REP 实现的自愈时间。结果记录如表3所示。

表3 网络恢复时间测试结果Tab.3 The result of network healing time
以上仿真结果证明,当网络链路遭到破坏时,本文设计的通信网络能够利用相应的冗余机制,较快地恢复网络通信功能,说明了本文提出的方案具有较好的可靠性。
4 结 语
传统的基于现场总线的动力信息交换系统,逐渐无法满足实际需求。以太网作为一种成熟、高效的网络通信技术,则可以在一定程度上弥补现场总线的不足,满足日益提升的通信要求。本文对如何构建基于以太网的舰船动力信息系统进行了研究,分析了动力信息系统通信的具体需求,设计了一种新型的基于以太网技术的舰船动力信息系统,并在OPNET 仿真平台上进行了验证,证明了本文提出方案的可行性。
[1]SKENDZIC,et al.Enhancing power system automation through the use of real-time Ethernet[C]//Power Systems Conference 2006:Advanced Metering,Protection,Control,Communication and Distributed Resources.USA:NewYork,2006:480-495.
[2]WINKEL,et al.Real-time ethernet in IEC 61784-2 and IEC 61158 series [C]//2006 IEEE International Conference on Industrial Informatics,INDIN ′06,USA:Antonio,2007:246-250.
[3]VAN T,et al.Hard and soft real time based on switched Ethernet[C].Proceeding- The 1st International Forum On Strategic Technology " eVehicle Technology",IFOST 2006,2006:378-382.
[4]罗伟,孙朝晖,方斌.船舶综合电力系统研究的新进展[J].舰船科学技术,2009,31(12):138-142.LUO Wei,SUN Zhao-hui,FANG Bin.The new progress in integrated power system research on shipboard[J].Ship Science of Technol,2009,31(12):138-142.
[5]LIU T D,et al.The design of industrial Ethernet adapter based on Ethernet/IP[C]//Proceedings of 2009 4th International Conference on Computer Science and Education,ICCSE 2009,2009:1239-1242.
[6]秦立新,查长松,徐建中.船舶综合电力推进系统的发展及应用[J].舰船科学技术,2009,31(5):159-162.QIN Li-xin,ZHA Chang-song,XU Jian-zhong.Development and application inmarine integrated power system[J].Ship Science of Technology,2009,31(5):159-162.
[7]MOON,et al.The design of humanoid robot arm based onmorphological and neurological analysis of human arm[C]//IECON Proceedings (Industrial Electronics Conference),2007:2760-2765.
