桥上列车移动荷载参数自动识别系统试验
2015-12-03虞婷婷瞿伟廉
王 仪,虞婷婷,瞿伟廉
(1.河南城建学院,河南 平顶山 467036; 2.武汉理工大学,武汉 430070)
桥上列车移动荷载参数自动识别系统试验
王 仪1,虞婷婷1,瞿伟廉2
(1.河南城建学院,河南 平顶山 467036; 2.武汉理工大学,武汉 430070)
提出了一种用于列车移动荷载参数自动识别的系统,并制作了等截面简支钢梁和试验列车模型进行试验研究。利用基于图像处理技术的桥梁动态位移采集系统,获取模型桥梁测点位置的动态位移响应,同时利用自行设计的列车模型参数采集系统获取列车模型的移动速度、轮轴个数和轴间距,最后采用桥梁列车多轴移动荷载识别系统识别出列车轴重荷载值。通过对不同移动速度、不同测点个数下列车参数识别效果的分析,验证了本文所述列车移动荷载参数自动识别系统的可行性和准确性,为今后荷载识别系统的实际应用做好准备。
振动与波;列车参数识别;简支梁;模型试验;图像处理技术
桥梁结构在动态荷载作用下的反应和破坏比例是在静态荷载作用下的2到4倍[1],铁路桥梁列车荷载质量大、速度快,因此准确获得经过桥梁的列车荷载大小成为铁路桥梁在使用和维护过程中首先需要解决的关键问题。
自从1988年0'Connor和Chen[2]提出利用桥梁的响应间接的计算车辆的动态荷载的解析法以来,移动荷载的识别理论逐步趋于完善,经历了由反向识别方法到正向识别方法的漫长发展过程[3-8],荷载识别的精度不断提高,可以识别的荷载个数不断增加。2000年后,余岭和Chan等人对桥梁结构移动荷载识别进行系统研究,分别采用解析法I、解析法II、时域法和频时域法这四种常用的荷载识别方法进行理论与试验的对比分析,提出了针对桥梁结构移动荷载识别的系统理论(MFIS),指出了各种识别方法的优缺点及适定性[9-11]。2004年S S Law等人采用基于有限元方法和凝聚技术,进行了数值分析和试验研究,识别了车辆与桥梁之间相互作用力,并对采样频率、移动速度等参数的影响进行讨论[12],之后在2008年[13]提出了采用小波分析的方法结合有限元技术进行移动荷载识别。以上研究取得了丰富的科研成果,但是前提都是在已经获知荷载移动速度、荷载个数和荷载轴间距的情况下进行的荷载识别,而实际的车辆在经过桥梁时的移动速度、荷载个数和轴间距都是未知之量,因此先前的列车荷载识别方法离实际应用还有一定的距离。
为此本文提出了列车多轴移动荷载参数自动识别系统,利用基于图像处理的桥梁动态位移采集系统,获取桥梁测点位置的动态位移响应时间历程;利用自行研制的列车参数采集系统获取列车荷载的移动速度、轮轴个数和轴间距;最后采用多轴移动荷载识别系统识别出列车轴重荷载值。为验证本方法的可行性,特制作了等截面简支钢梁模型和试验列车模型。通过对不同移动速度、不同测点个数下列车参数识别效果的分析,验证了本文所述列车荷载参数自动识别系统的有效性和正确性,为今后列车荷载识别系统的实际应用做好准备。
1 模型制作
1.1 单跨等截面简支钢梁模型
桥梁模型总体包括主梁、导梁和尾梁三部分,三者均选用钢材制作,材料属性和尺寸见表1。

表1 主梁、导梁和尾梁材料尺寸表
主梁简支,导梁和尾梁分别用以列车模型驶入桥梁之前加速过程和驶出桥梁之后减速之用,列车模型由可调速的马达经绳索牵引匀速行驶。测点均匀布置于桥梁L/4,L/2,3L/4位置,如图1所示。
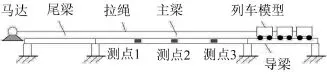
图1 桥梁列车试验模型
1.2 列车与轨道模型
为了能更好的模拟列车荷载通过桥梁时的结构响应情况,参考实际铁路系统列车与轨道配合方式,轨道由两根钢条及与其相连的枕木构成,枕木等间距均匀布置于导轨下面;模型小车车轮外缘凸出与轨道进行配合,防止小车出轨并使其延导轨方向行驶;每节车厢有前后两个轮轴,每个轮轴两端分别安装一个车轮,如图2所示。
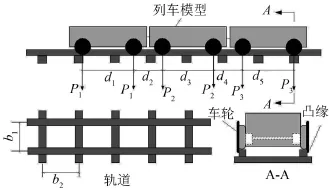
图2 列车模型与轨道
列车模型的基本设计参数如表2所示。
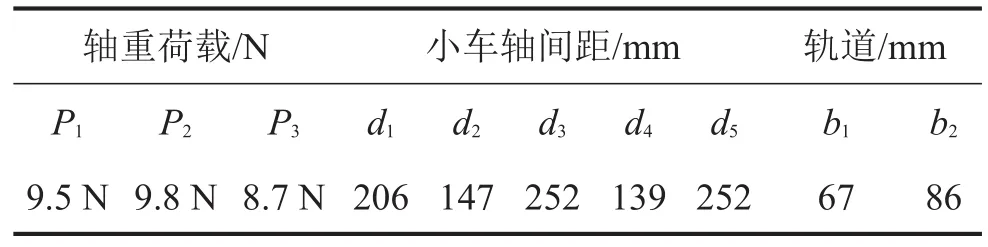
表2 小车与轨道模型参数
2 列车移动荷载参数自动识别系统
本系统主要包括以下三个子系统:桥梁动态位移采集系统、列车参数采集系统和多轴移动荷载识别系统。如图3所示。
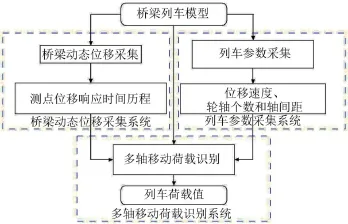
图3 列车多轴移动荷载识别系统
在列车驶过桥梁的过程中,由桥梁动态位移采集系统测量并记录下桥梁在列车荷载作用下测点位置的位移时间历程,由列车参数采集系统识别出经过桥梁的列车速度、轮轴的个数和轴间距,之后将上述位移时间历程和列车各参数作为输入参量,经过多轴移动荷载识别系统识别出通过桥梁的列车轴重荷载大小。
2.1 桥梁动态位移采集系统
桥梁动态位移采集系统是一种基于数字图像处理技术的结构位移监测方法,鉴于数字图像处理技术具有非接触、全场测量和高精度三大特点,该系统的实际应用已经取得丰硕的成果[14,15]。在使用过程中,首先将目标板分别固定于待测结构所需位置,要求目标板的X-Y坐标轴与测点所在的工程坐标系的X-Y坐标轴平行;然后将采集镜头放置于固定不动的点上,摄像机的主光轴可以任意角度摆放,只要摄像机能够摄取目标板上的像即可,经过中央控制主机的软件处理即可获得测点位置位移响应时程。本试验采集系统3块目标板分别布置于简支梁桥L/4(S1),L/2(S2)和3L/4(S3)节点位置,桥梁坐标系的X-Y轴为简支梁的“纵—竖”方向,系统布置如图4所示。

图4 动态位移采集系统
2.2 列车参数采集系统
为了识别经过桥梁的列车轴重荷载大小,除了需要获取桥梁结构位移响应之外,还需要获取列车移动速度、轮轴个数和轴间距等参数信息,以供在荷载识别过程之用。针对此问题,特设计制作了列车参数采集系统,其设备构成如图5所示。
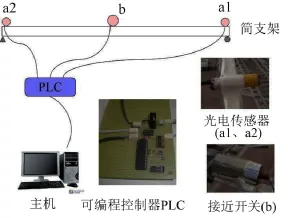
图5 列车参数采集系统
分别将两个光电传感器p1、p2固定于桥梁之上,并使其保持一定的间距D,当列车匀速经过桥梁时,记录下列车驶过两个光电传感器间距所需要的时间ΔT,则列车行驶速度V可表示为

接近开关b可以根据其检测范围固定于轨道两侧或下方,此处固定于轨道侧面,当列车轮轴经过时就可以获取感应信号,首先根据感应到的信号次数判断经过的列车轮轴的个数,其次根据感应信号间的时间差和之前获得的列车行驶速度V,计算列车每个轮轴之间的轴间距,即

这些过程都可以通过可编程控制器(PLC)获取信号,然后由电脑后处理软件处理完成。
2.3 多轴移动荷载识别系统
将由动态位移采集系统获得的桥梁位移响应和列车参数采集系统获得的列车参数作为输入数据,利用模拟退火遗传算法对列车荷载进行识别[8],从而获得列车轴重荷载的大小,其操作过程如图6所示。
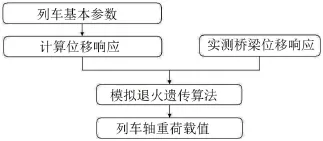
图6 多轴移动荷载识别系统
模拟退火遗传算法以预设测点位置实际桥梁位移响应与计算位移响应差值作为目标函数,通过不断缩小该差值来获取全局最优解,目标函数如式(3)所示

其中Objectk(j)表示k代第j个个体的目标值和适应度值和分别表示k代第j个个体第n个测点实际位移响应和计算位移响应,‖·‖表示向量的范数。
t时刻、任意位置x处的桥梁动态位移v(x ,t)可以通过求解桥梁振动微分方程获得
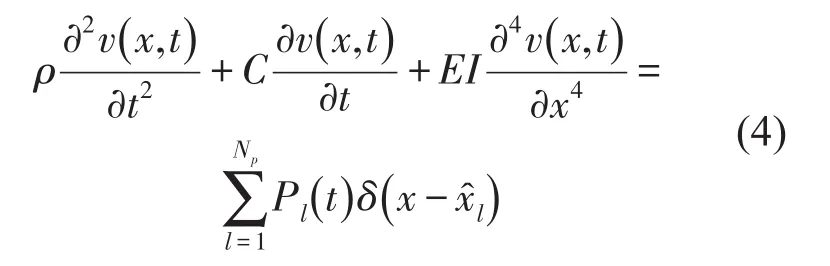
其中,截面抗弯刚度为EI,单位长度质量为ρ,粘滞阻尼C,v(x,t)为t时刻、位置x处的梁的挠度,为迪拉克函数为t时刻第l个荷载到桥头的距离。
根据模态振型叠加法将挠度v(x,t)表示为

式中i为振型阶数,φi(x)为第i阶模态振型函数,qi(t)为第i阶模态坐标。
将方程(5)代入方程(4),利用振型正交性化简方程,并对得到的方程对x从0到L积分,注意到边界条件和迪拉克函数的性质,可以得到
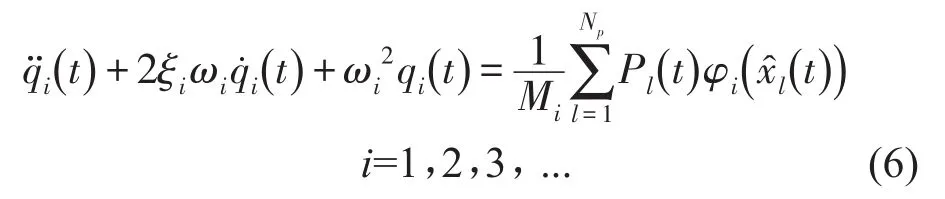
式中ωi为第i阶模态频率;ξi为第i阶模态阻尼比,为第i阶模态质量。
3 试验结果分析
误差分析采用识别值与测量值之间的范数相对百分比误差Error对识别精度进行描述,如式7所示
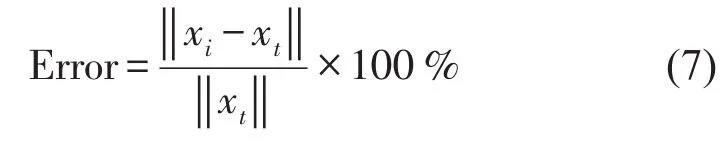
式中xi为识别值向量,xt为测量值向量,‖·‖表示对向量取范数。
采用本文所述列车移动荷载参数自动识别系统,分别进行三次列车过桥试验,获得的三组测点位移响应时程曲线如图7所示。

图7 测点位移响应时程曲线
识别得到的轮轴荷载个数、小车移动速度和轴间距误差见表3所示。
由表3可以看出,三组试验工况下,采用本文所述参数识别方法可以获取列车移动速度,准确识别轮轴个数,轴间距识别误差变化不大,最大值为4.01%,满足工程需要。
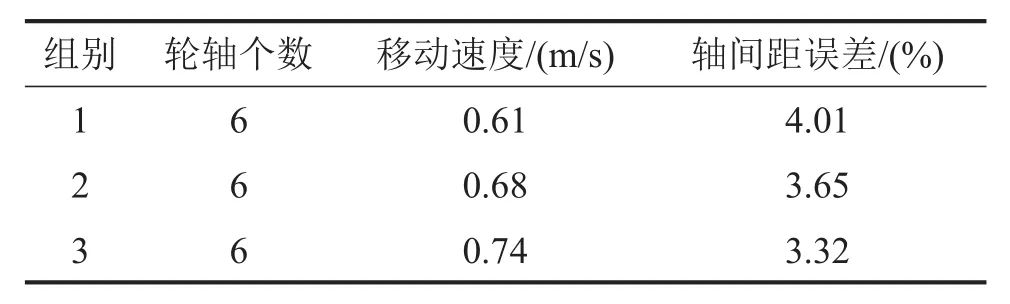
表3 列车参数识别结果分析
采用matlab自带低通滤波器对桥梁响应进行滤波,然后进行轴重荷载识别得到在不同移动速度、不同测点个数情况下,3节车厢6个荷载的轴重荷载识别误差值见表4。
由表4不难发现三组试验工况下,轮轴荷载识别误差波动不大且均在可接受范围之内,最大识别误差为第三组单测点的10.18%,随着测点个数的增加荷载识别的误差值逐渐下降,识别精度逐步提高,说明增加测点个数可以增加识别结果的准确性,并且为增加识别可靠性应避免采用单测点进行信号采集。
4 结语
建立了等截面简支钢梁桥模型和列车与轨道模型。采用基于图像处理技术的桥梁动态位移采集系统测量列车经过桥梁时的预设测点位移响应时程,利用列车参数采集系统,识别列车移动速度、轮轴个数和轴间距等参数信息,最后利用多轴移动荷载识别系统进行列车轴重荷载的识别。通过列车过桥的模型试验和参数讨论,验证了本文所述列车参数识别系统的有效性和正确性;可以实现对于轮轴个数和移动速度的识别,并且能够获得可以接受的轴间距和轴重荷载识别精度。
在实际应用方面,列车过桥过程中,基本以低速匀速通过,利用该系统更加容易获取列车运行速度、轮轴个数和轴间距等参数,对于提高轴重荷载的识别精度会更有帮助;采用CCD图像处理技术,本系统位移监测距离可以达到300 m甚至更远,可以方便获取实际桥梁测点位移响应时程,为今后该系统的实际应用做好准备。
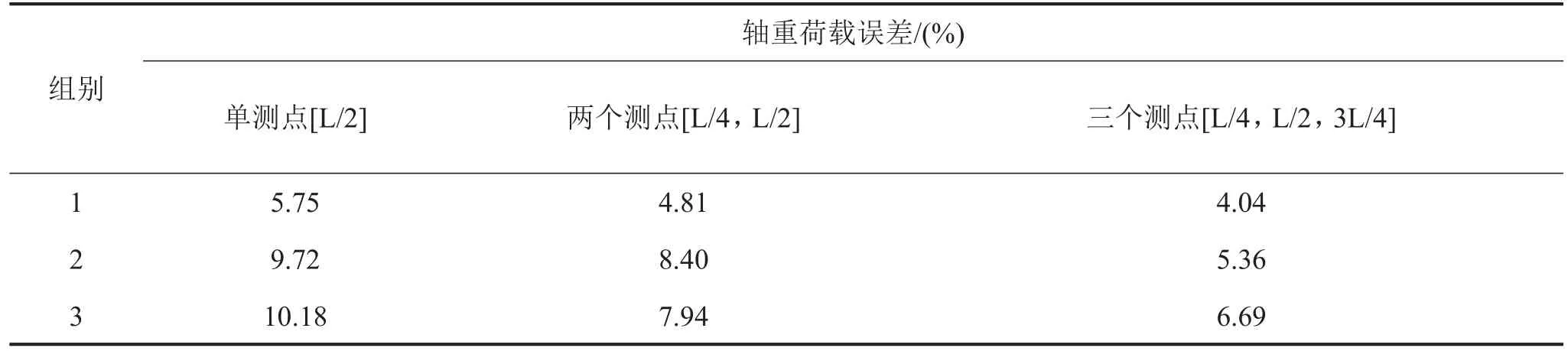
表4 不同测点个数情况下的荷载识别误差值
[1]Cebon D.Assessment of the dynamic wheel forces generated by heavy road vehicles[C].Symposium on Heavy Vehicle Suspension and Characteristics,Australian Road Research Board,1987.199-212.
[2]Connor O,Chan T H T.Dynamic wheel loads from bridge strains[J].ASCE Journal of Structural Engineering, 1988,114:1703-1723.
[3]袁向荣,陈恩利,Chan T H T.由响应识别桥上移动荷载[J].工程力学,1997,14(4):89-97.
[4]李忠献,陈锋.基于梁格法的桥梁移动荷载识别[J].土木工程学报,2006,39(12):83-87.
[5]袁向荣.梁振动响应曲线滑动拟合法及在移动荷载识别中的应用[J].噪声与振动控制,2006,(3):42-43.
[6]余 岭,朱军华,陈敏中,等.基于矩量法的桥梁移动车载识别试验研究[J].振动与冲击,2007,26(1):16-20.
[7]瞿伟廉,王仪.根据响应识别桥上列车荷载的模糊模式识别方法[J].噪声与振动控制,2010,31(1):86-89.
[8]Qu Wei-lian,Wang Yi,Pi Yong-lin.Multi-axle moving train loads identification on simply supported bridge by using simulated annealing genetic algorithm[J].International Journal of Structural Stability and Dynamics,2011, 11(1):57-71.
[9]Chan T H T,YU Ling,Law S S,et al.Moving force identification studies I:Theory[J].Journal of Sound and Vibration,2001,247(1):59-76.
[10]Chan T H T,YU Ling,Law S S,et al.Moving force identification studies II:Comparative studies[J],Journal of Sound and Vibration,2001,247(1):77-95.
[11]YU Ling,Chan T H T.Recent research on identification of moving loads on bridges[J].Journal of Sound and Vibration,2007,305:3-21.
[12]Law S S,BU J Q,Zhu X Q,et al.Vehicle axle loads identification using finite element method[J].Engineering Structures,2004,26:1143-1153.
[13]Law S S,WU S Q,SHI Z Y.Moving load and prestress identification using wavelet-based method[J].Journal of Applied Mechanics,2008,75:021014-1-021014-7.
[14]罗洪斌,赵文光,文银平,等.CCD图像监测系统应用于桥梁结构检测[J].华中科技大学学报(城市科学版), 2006,23(S1):91-93.
[15]LI Peng-hui,ZHAO Wen-guang,WEN Yin-ping,et al. Application of digital image monitoring system to detecting a high voltage icing conductor[J].Geo-spatial Information Science,2009,12(1):61-65.
Experimental Study onAutomatic Identification of Moving Train Load Parameters of Bridges
WANG Yi1,YU Ting-ting1,QU Wei-lian2
(1.Henan University of Urban Construction,Pingdingshan 467036,Henan China; 2.Wuhan University of Technology,Wuhan 430070,China)
A new system for moving-train load-parameters identification was presented and experimentally studied based on a simply supported steel beam with constant cross-sections subjected to moving train loads.The dynamic displacement responses at the measurement points of the bridge were simultaneously measured by using the displacement image-processing monitoring system.Basic parameters of the model train,including moving speed,axle number and axle spacing, were identified with a parameter acquisition system.Finally,the moving train loads were identified by using multi-axle moving-loads identification system.Effects of parameters identification for different moving speeds and measurement points of the proposed system were investigated.The feasibility and accuracy of this system for moving-train load parameters identification were verified.This work may provide a base for practical application of the load identification system.
vibration and wave;train load parameters identification;simply supported beam;model experiment;image processing technique
TU3
A
10.3969/j.issn.1006-1335.2015.02.025
1006-1355(2015)02-0107-05
2014-04-11
河南省教育厅项目(12B560002);国家高技术863计划项目(2007AA11Z119)
王仪(1983-),男,河南舞钢人,博士,主要研究方向:结构健康监测与振动控制。E-mail:wangy@hncj.edu.cn
瞿伟廉(1946-),男,博士生导师,主要研究领域:结构防灾减灾。E-mail:qwlian@sina.com