同步辐射光束线束斑形状实时分析技术
2015-12-02张春波汪启胜何建华
张春波 汪启胜 黄 胜 何建华
1(中国科学院上海应用物理研究所 张江园区 上海 201204)
2(中国科学院大学 北京 100049)
同步辐射光束线束斑形状实时分析技术
张春波1,2汪启胜1黄 胜1何建华1
1(中国科学院上海应用物理研究所 张江园区 上海 201204)
2(中国科学院大学 北京 100049)
同步辐射是由同步辐射装置产生的宽光谱、高通量、高准直、高亮度的优质光源,在许多领域已得到广泛应用。同步辐射光束的光斑大小是其最为重要的特性之一。常规测量光斑大小的方法是采用狭缝或刀片扫描光束,然后根据光强变化计算出光斑的大小,这种方式准确度高,但过程繁琐、效率较低。同步辐射光束照射到荧光靶上会形成可见光光斑,通过安装在光束线上的共轴摄像头可以获取光斑的图像信息。本文提出一种基于图像处理的光斑提取方法,能够快速提取光斑大小并显示光斑中心的位置以及光斑的对称性。测试结果表明:该方法能够实时地获取同步辐射光斑特征信息,且光斑尺寸在一定范围变化时具有较高的准确性,在光束线调试过程中可以作为一种有效的辅助测量手段。
同步辐射光斑,实时分析,数字图像处理,直方图,自适应阈值
同步辐射是由接近光速运动的电子在磁场中作曲线运动改变运动方向时所产生的电磁辐射。上海同步辐射装置(Shanghai Synchrotron Radiation Facility, SSRF)是先进的中能第三代同步辐射光源,已建有12条光束线站。每一条同步辐射光束线站从初建成到后来的运行中都要进行光路准直、能量标定以及优化光斑等操作,使到达光束线实验站的同步辐射光束的各项参数满足实验要求。
同步辐射光斑的大小是影响实验数据质量的重要因素,对于上海光源生物大分子晶体学线站(BL17U1)而言,光斑越小、光通量密度越高,越容易获取高信噪比的实验数据[1]。在以往光束线站调试和优化过程中,获取光斑大小的方法是用狭缝或者刀片对光束进行扫描,然后根据扫描过程中电离室记录的光强变化计算出光斑大小。这种方法由于需要进行扫描和数据处理两步操作,每获取一次光斑尺寸都需要几分钟时间,效率较低。因此,本文提出一种全新的、基于数字图像处理的方法,不仅能够实时地显示光斑的大小,而且能够显示出光斑中心的位置和光斑的对称性等信息,在实际应用中能够有效地提高常规优化的速度,并且为光束线自动优化提供了新的手段。
1 原理和方法
1.1 同步辐射光斑实时提取原理
荧光靶是一种结构和原理较简单的束流截面监测装置,可以配置在光束线的不同位置上。同步辐射光束打到荧光靶上会形成一个与光束截面分布相似的光斑,通过光斑的明暗和形状可以直接观测光束的强弱及其截面分布。
共轴摄像头是与光束线的设计光路共轴的高倍显微镜,使用电荷耦合元件(Charge-coupled Device, CCD)获取图像,通过安讯士(Axis)视频服务器接入网络。它可以沿着光路方向观察样品或光斑,没有视差,便于精确对准,光路示意图见图1。
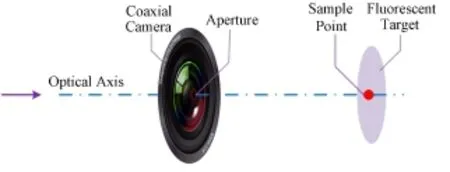
图1 共轴摄像头光路示意图Fig.1 Schematic diagram of axis camera.
同步辐射光斑实时提取技术是通过荧光靶、共轴摄像头和图像处理技术来实现,共轴摄像头将同步辐射光束打到荧光靶上形成的光斑采集生成数字图像,并通过网络传送给图像处理程序,图像处理程序对图像进行相关处理和特征提取,并将处理后的带有光斑特征信息的图像在监视器上显示出来。由于上述过程是持续不间断的,光斑的特征信息就以视频的形式实时地展现出来。提取一次光斑特征信息所需要的时间主要取决于网络摄像头的帧频和计算机对每一帧图像的处理速度,同时还受到网络传输速度的影响。
1.2 图像处理方法和步骤
图像处理是光斑提取的关键环节,执行图像处理的程序是作者基于OpenCV视觉库自行开发的Java程序。
图像处理的过程主要有:色彩空间的转换、高斯平滑、开操作、图像的二值化、光斑轮廓的获取和拟合、光斑对称性的绘制。
1.2.1 RGB空间到HSV空间的转换
彩色模型(彩色空间)用于在规定标准下采用可接受的通用方式简化彩色规范。实际中最通用的颜色模型是RGB模型,表示的图像由红(Red)、绿(Green)、蓝(Blue)三个分量组成,显示的时候将每个分量表示的图像混合便产生了一幅彩色图像[2]。HSV颜色空间是根据颜色的直观特性创建的一种颜色空间,H代表色调,描述纯色的属性(纯黄色、橘黄或红色);S代表饱和度,给出一种纯色被白稀释的程度;V代表亮度,亮度体现了无色的强度。
在光斑提取中,由网络摄像头抓取的图像是RGB空间的。但是,由于荧光靶的材料不同,例如可以使用BGO或者YAG晶体作为荧光靶,同步辐射光束打到荧光靶上产生的光斑图像的背景色就有所不同,有的可能呈现黄色,有的可能呈现蓝色。而在提取光斑的过程中,我们更关注的是图像的亮度信息,在对图像做进一步的处理之前,需要将图像转到HSV空间,通过通道分离便得到图像的亮度信息。
1.2.2 高斯平滑
高斯滤波主要用作对图像的平滑处理,消除高斯噪声。主要有两种实现方式:一种是离散化窗口滑窗卷积;另一种是通过傅里叶变换。本文采用第一种,用一个卷积核(模板、掩模)扫描图像中的每一个像素,将卷积核与其所覆盖的像素做高斯卷积运算,用卷积值代替中心像素点的值[2−3]。
1.2.3 开操作:先腐蚀后膨胀
腐蚀和膨胀是两种图像形态学处理方法,在具体操作中,有不同的映射定义形式[2],本文采用OpenCV的膨胀和腐蚀方法[3]。腐蚀的具体操作是:用一个模板(3×3的模板矩阵)扫描图像的每一个像素,并用矩阵所覆盖的最小像素值代替扫描点位置的像素;膨胀的具体操作与腐蚀类似,提取模板所覆盖的最大像素值作为扫描点位置的像素值。腐蚀的作用是用于消除小于模板大小的噪声像素,膨胀的作用是将与目标轮廓接触的所有背景点合并到物体中,添补目标中的空洞。
开运算是先腐蚀后膨胀的过程,可以消除光斑图像上细小的噪声,使光斑的轮廓更平滑[2]。
1.2.4 获取光斑轮廓:图像二值化
获取图像边缘的方法主要有二值化和边缘检测算子(Roberts, Sobel, Canny等),边缘检测算子在检测复杂边缘时会有良好的效果,但是对噪声比较敏感。在共轴显微镜获取的图像中光斑和背景亮度相差很大,且单一轮廓,采用二值法更简单精确。
在执行二值化的过程中,光斑的大小和亮度会随着同步辐射光束而不断变化,单一阈值并不能很好地满足光斑实时提取的需要。基于此,本文提出一种基于灰度直方图的自适应阈值获取方法(详见§1.3),很好地解决了这一问题。
图像经过二值化处理以后就可以通过OpenCV中的cvFindContours()函数进行提取轮廓的操作。在OpenCV中用序列来存储提取出来的光斑轮廓,用以绘制轮廓和特征提取,序列中的元素代表图像中轮廓点的位置[3]。
1.2.5 光斑特征的提取
找出光斑轮廓以后,需要采用多边形逼近的方式绘制轮廓,OpenCV采用的是Dougias-Peucker (DP)算法[3]。首先从提取的光斑轮廓中找出两个相距最远的点作为顶点,并将这两个点连成线段。然后再在光斑轮廓上找到距线段最远的点作为下一个顶点,这样不断迭代,将新的顶点添加到结果中,直到光斑轮廓上所有的点到多边形的距离最小值小于指定精度。
对轮廓进行拟合:用一个水平方向的、能够将光斑轮廓完全包围的最小矩形对光斑进行拟合,矩形的宽度和高度即为用像素表示的光斑在水平和垂直方向上的尺寸,矩形的中心即为光斑的中心。之所以用水平方向上的矩形进行拟合,是因为用来标定的刀片扫描测量光斑尺寸的方法也是在水平和垂直方向上分别对光斑进行扫描得到光斑在水平和垂直方向上的尺寸。
1.2.6 绘制光斑的对称性
统计图像中光斑部分(高于阈值的部分)的亮度分布:在水平方向上统计光斑每一列的亮度值总和并以一定比例描绘出来即为光斑在水平方向上的分布曲线,在垂直方向上统计光斑在每一行的亮度值总和并以一定比例描绘出来即为光斑在垂直方向上的分布曲线。
1.3 基于灰度直方图的自适应阈值
灰度直方图是图像灰度数据的统计图,表示图像中相应灰度级下对应的像素个数,反映了图像中灰度出现的频率分布[2]。图2(a)和(b)分别是半高宽约为20 μm和100 μm的光斑图像,图2(c)和(e)分别是与之对应的灰度直方图。
从图2(c)和(e)中可以看出,共轴摄像头采集的光斑图像由所要提取的光斑(前景)和光斑以外的背景组成,光斑部分的灰度和背景部分的灰度集中分布于直方图的两端。从背景中提取光斑的一种方法是在灰度直方图中选择一个门限值T,所有大于T的像素点为光斑点,否则就为背景点[2]。
通常而言,前景与背景的灰度级分布是双峰结构或者多峰结构,前景和背景的部分灰度会在峰谷处有所重叠,将峰谷处的灰度值设为T就可以很好地将前景和背景分离[2]。但是,光斑图像的不同之处在于其灰度分布不是双峰或者多峰分布,而是集中在两端的半峰分布。峰谷的宽度很宽,而且当光斑很小的时候,如图2(c),几乎看不到前景的峰。这意味着将门限T设在峰谷极有可能是不准确的。

图2 光斑图像(a、b)及对应的灰度直方图(c−f)(a) 20 μm,(b) 100 μm,(c) 20 μm,(d) 20 μm附近图像,(e) 100 μm,(f) 100 μm附近图像Fig.2 Spot images (a, b) and corresponding histogram (c−f).(a) 20 μm, (b) 100 μm, (c) 20 μm, (d) Near 20 μm, (e) 100 μm, (f) Near 100 μm
图2 (d)和(f)分别是图2(a)和(b)中光斑部分(包含少部分背景)的灰度分布。可以看出,由于光斑有一定的弥散,边缘并不明显,虽然已经将大部分的背景分离,但是在图上依然没有出现峰谷。和方差的阈值提取方法[4]。首先在两个半峰之间找到像素个数最少处的灰度值T1作为前景与背景的分割阈值,这样通过T1就把大部分的背景灰度分离掉,大于T1的灰度分布就包含了所有的光斑部分的灰度和少量的背景灰度。然后,计算灰度直方图中大于T1部分灰度的均值μ和标准差σ,将μ±c×σ(c为系数)作为阈值,通过测试确定c的值。经过多次测试,最终确定当阈值设为μ−σ时,提取光斑的效果最好。
1.4 标定方法
通过图像处理的方法提取的光斑大小用像素来表示,必须经过标定才能反映出真实的光斑大小。标定的方法是通过狭缝或者刀片扫描测出光斑的实际尺寸(光斑的半高宽FWHM),然后根据式(1)算出相应的比例系数κ:

式中,P是像素表示的光斑尺寸;V是实际测得的光斑尺寸。
标定的目的在于准确地反映出每个像素所代表的实际光斑大小。随着光斑变大,光斑的弥散会越来越强;而在光斑很小的时候,通过狭缝或刀片扫描的方式测得的实际光斑尺寸系统误差占的比重又很大。所以,通过在不同的光斑尺寸下计算相应的比例系数然后取平均值的方法并不可靠。因此本文提出要在特定的光斑尺寸下进行标定:选取的光斑形状要尽可能规则,边缘尽可能清晰,不能有太大弥散;光斑不能太小且要比较稳定,尽可能地减少系统误差带来的影响。如果条件允许,可以选取多组光斑尺寸进行标定以使结果更精确。
基于上述原因,本文尝试一种基于灰度级均值
2 测试结果和分析
同步辐射光斑实时提取系统的相关测试在上海光源生物大分子晶体学线站(BL17U1)进行。荧光靶的材料为100 μm厚度的锗酸铋(Bi4Ge3O12, BGO)晶体。
微孔准直器(Collimator)是BL17U1光束线站上位于衍射仪上的简单装置,其上面有不同直径的微孔(Pinhole)。BL17U1可用的微孔尺寸有100 μm、 20 μm、10 μm和5 μm。测试过程中通过将微孔放进光路中来改变光斑的尺寸。
测试时采用的网络摄像头型号为WAT-902HB2S,光敏单元的尺寸为8.4μm(H)× 9.8μm(V),有效像素为752(H)×582(V),帧频为25fps。计算机CPU主频为2.83 GHz,内存容量为4G,操作系统为CentOS6.5(64位),处理一帧图片所需要的时间约10 ms。所以,提取一次光斑信息所需要的时间主要由摄像头帧频决定,约40 ms。
图3是将不同尺寸的微孔放入光路以后通过图像处理得到的光斑图像,图3中的光斑尺寸是光斑对应的像素值,表1中是与之对应的前景灰度均值、标准差和二值化阈值(OUT表示将Collimator移出光路的状态,数字与相应的微孔直径相对应)。通过图3可以看出,通过图像处理的方式提取的光斑在很大范围内都是准确的,在图3(e)中,对应光斑很小,而背景噪声很大;在图3(a)和(b)中,由于光斑变大,弥散严重,边界变得很模糊。但是,在不断变化的5幅图像中,图像处理程序都比较准确地绘出了光斑轮廓。

图3 不同微孔尺寸下的光斑图像Fig.3 Spot images with pinholes of different size.(a) OUT, (b) 100 μm, (c) 20 μm, (d) 10 μm, (e) 5 μm

表1 灰度和阈值信息Table 1 Gray scale and threshold information.
2.1 系数κ的标定
将Collimator上20 μm的微孔放入光路得到的光斑大小适中,光斑形状较规则,光斑边界弥散较小,因此采用该条件下的光斑尺寸进行标定。
标定时,采用刀片扫描的方法获取8组光斑在水平方向上的半高宽,然后记录8组通过图像处理获取的光斑水平方向上的尺寸(像素值),然后用两组数据的平均值来计算比例系数。
标定所采用的像素值和实测值数据(半高宽)见表2,通过计算获得的比例系数κ的值为3.2。
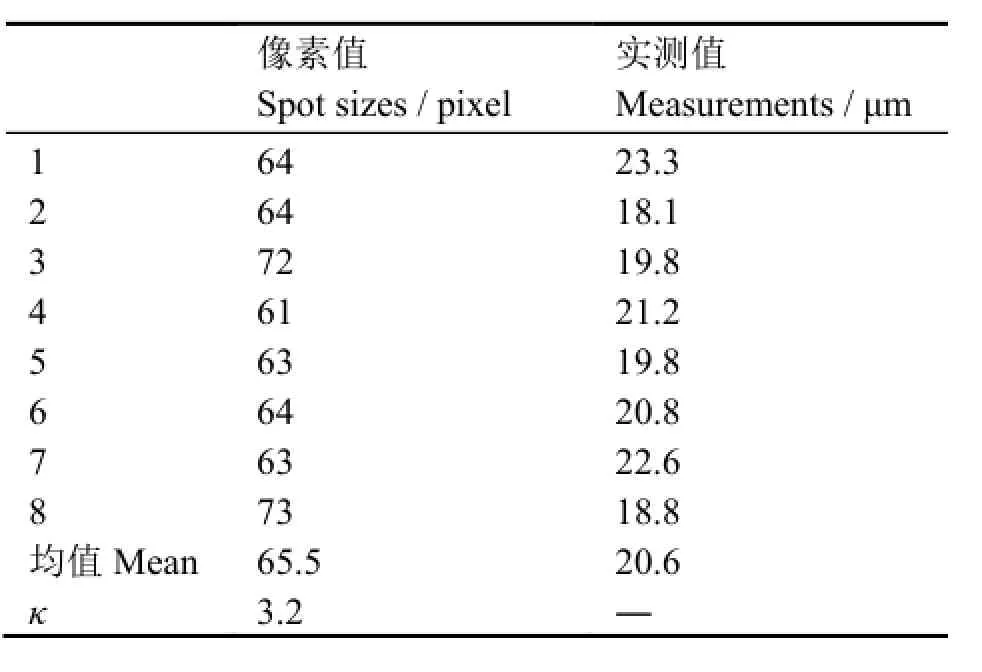
表2 标定数据Table 2 Data for demarcation.
2.2 测试数据及分析
标定κ值之后,通过基于图像分析的光斑获取方法可快速获得光斑尺寸。表3和4分别是将不同孔径的微孔放入光路后通过刀片扫描和图像处理的方式获取的光斑尺寸,每一光斑尺寸下分别测得8组数据。V1和V2是用μ和σ表示的光斑尺寸(Vn=μn±σn,n=1, 2)。
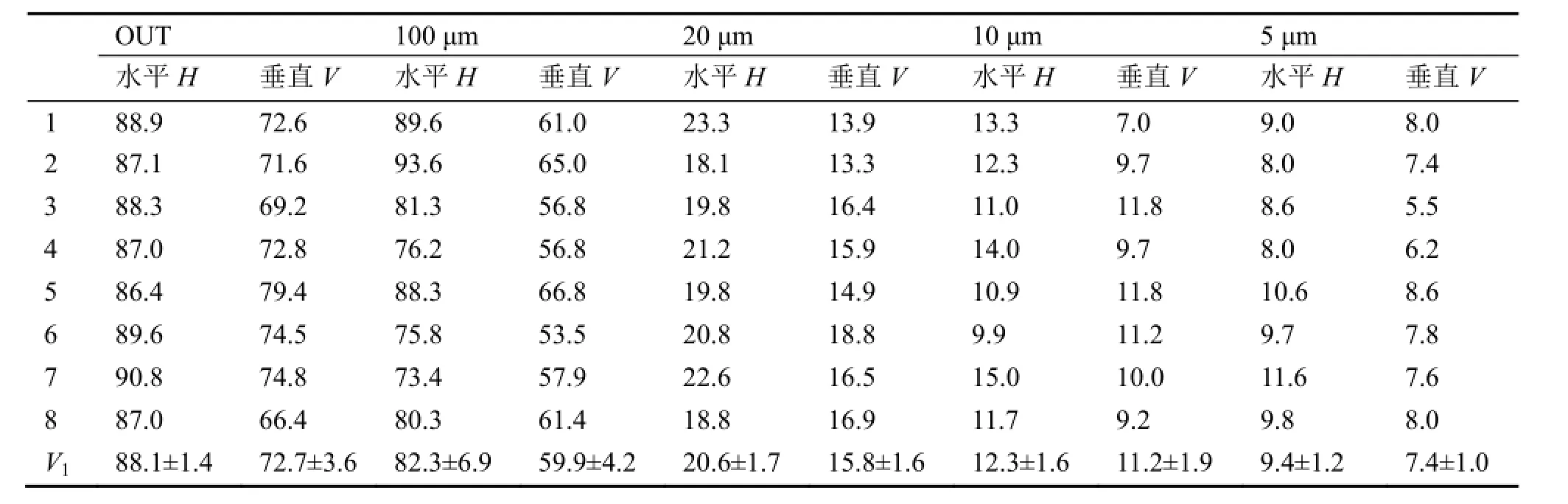
表3 通过刀片扫描获取的光斑尺寸Table 3 Spot size gained from blade scan (μm).
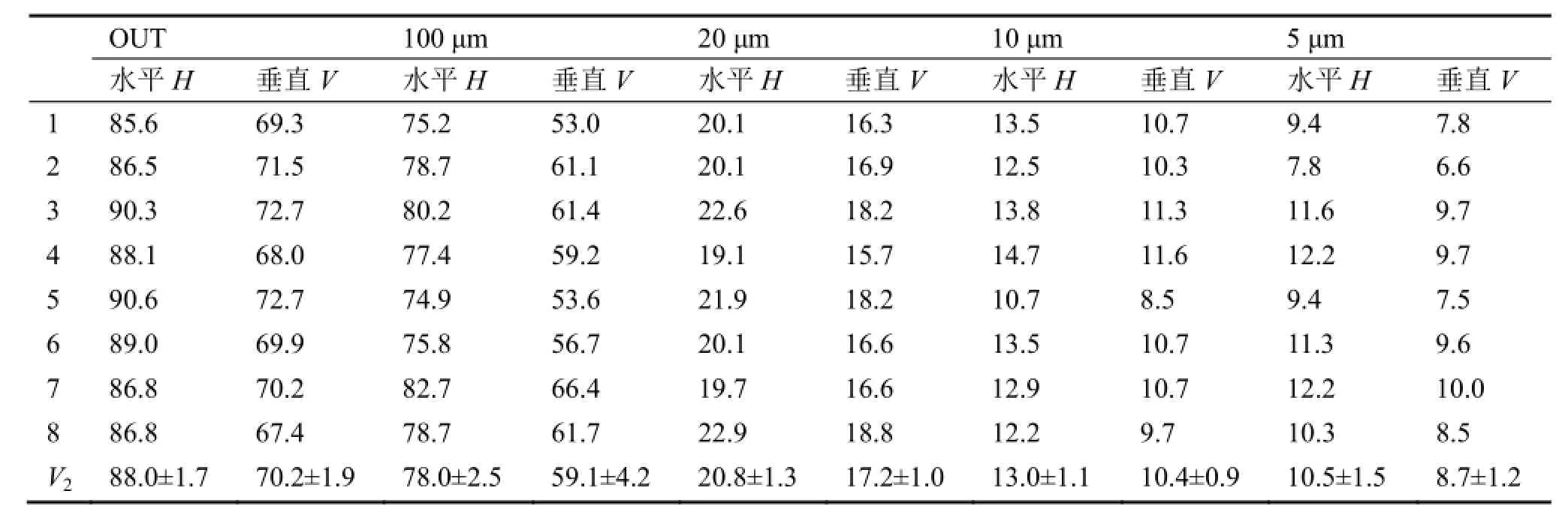
表4 通过图像处理获取的光斑尺寸Table 4 Spot size gained from image processing (μm).
表5是两种测量方法获取的平均值差异以及以刀片扫描结果为光斑大小的测量真值计算出的相对差异。

表5 平均值差异和相对差异Table 5 Mean difference and relative difference.
通过表3和4的测量数据及表5的测量差异信息可以看出,通过图像处理的方式和通过刀片扫描的方式获取的光斑尺寸基本上是一致的。这说明在测试条件下的光斑变化范围内,通过图像处理的方式获取的光斑尺寸具有较高可信度。
通过图像处理的方式获取光斑尺寸的系统误差主要有以下几个方面:
(1) 标定造成的误差
本文用刀片扫描测得的光斑尺寸对通过图像处理获取的光斑尺寸进行标定,这样刀片扫描的测量误差在标定时会被引入新的测量方法中。例如,刀片在垂直、水平方向扫描光斑尺寸时,扫描方向与光斑轴线存在角度偏差,其偏差与图像显示一致。该角度偏差带来的测量误差通过标定过程传递为图像分析的系统误差。此外,刀片扫描的方法获取的光斑尺寸是光斑高斯分布的半高宽[5],而图像处理的方法从背景中分离出来却是整个光斑,这样在标定时会造成一定的误差。
(2) CCD的测量误差
通过图像处理获取的光斑尺寸精度受CCD分辨率的限制。CCD的分辨率为一个像素(光敏单元),本系统测试采用的CCD光敏单元尺寸为8.4μm(H)×9.8 μm(V),所以CCD在水平方向上的分辨率为8.4 μm,在垂直方向上的分辨率为9.8 μm。荧光靶形成的光斑在到达CCD之前经过了物镜10倍的放大,当放大后的光斑尺寸为光敏单元尺寸的整数倍时测量值跟真实值更接近,放大后的光斑尺寸与光敏单元尺寸越接近,CCD测量误差造成的影响就越大[6]。
(3) 光斑弥散造成的误差
对于相同材料和厚度的荧光靶,光斑越大和光通量越高,弥散就越大[7]。虽然在§1.3中采用图像处理的方法进行了相关处理,但光斑弥散造成的误差依然不可忽略。
(4) 光斑轮廓不规则造成的误差
图像处理的方法是将整个光斑从背景中分离出来,并用一个最小的矩形对光斑轮廓进行拟合,代表的是光斑在水平和垂直方向上的最大尺寸,当光斑形状不规则时,就会造成一定的误差。这种误差在光斑形状较规则和边缘较清晰平滑时,对测量结果的影响很小,而当光斑边缘有小的突起特别是尖刺状突起时会造成比较大的误差。
由表5可以看出,两种测量方法的平均值相对差异在光斑变小时有逐渐增大的趋势。这是因为光斑越小,CCD有限尺寸的光敏单元引入的测量误差就会越来越大。此外,光斑变小时,光斑在图像中所占的比例下降,增加了图像数字化处理中的误差。该趋势说明,对于几微米的光斑,甚至亚微米及以下光斑,需要考虑的因素更多:荧光靶的材料[8]和厚度、CCD芯片的像素大小、甚至温度稳定性等,需要更苛刻的硬件配置并提高图像处理算法[9],才能获得准确的结果。
通过图像处理获取光斑尺寸的方法由于受到上述多种因素的影响,并不能作为一种光斑尺寸的精确测量手段。其适用范围可以覆盖10−100 μm光斑特性的快速测定,所以除了微聚焦光束线外,这种方法对大部分光束线都有较好的应用前景。由于其快速、直观的特点,在光束线调试过程中可以作为一种有效的诊断手段。
2.3 光斑中心及对称性
图4是在不同的光斑尺寸下捕获的光斑中心位置以及光斑的对称曲线。表6分别是其对应的中心点位置,坐标原点位于图像中心。

图4 光斑中心和光斑对称性Fig.4 Spot center and symmetry.(a) OUT, (b) 100 μm, (c) 20 μm, (d) 10 μm, (e) 5 μm
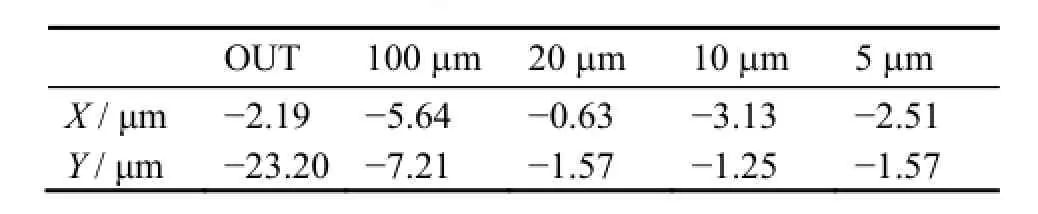
表6 光斑中心坐标Table 6 Spot center coordinate.
3 结语
本文提出一种基于图像处理实时的同步辐射光斑提取方法。经过测试,获取的光斑尺寸与通过刀片扫描的方式获取的光斑尺寸大致吻合。与狭缝或刀片扫描的方式相比,这种方式更快速、更直观,而且能够同时显示光斑的二维尺寸信息、光斑的中心点及光斑的对称性,在同步辐射光束线的调试中可以作为一种有效的辅助手段。
1 汪启胜, 郁峰, 王思胜, 等. 上海光源生物大分子晶体学线站[C]. 中国晶体学会全国会员代表大会暨学术大会, 2012
WANG Qisheng, YU Feng, WANG Sisheng, et al. Macromolecular crystallography beamlineat SSRF[C]. Crystal Society of China National Congress and Academic Assembly, 2012
2 阮秋琦, 阮宇智. 冈萨雷斯数字图像处理[M]. 第二版.电子工业出版社, 2007
RUAN Qiuqi, RUAN Yuzhi. Digital image processing[M]. 2ndEd. Electronic Industry Press, 2007
3 于仕琪, 刘瑞棋. 学习OpenCV[M]. 北京: 清华大学出版社, 2008
YU Shiqi, LIU Ruiqi. Learning OpenCV[M]. Beijing: Tsinghua University Press, 2008
4 De Waele S, Broersen P M T. Adaptive detection with time series models[C]. RADAR 2002 IEEE, 2002: 449−453
5 Suzaki Y, Tachibana A. Measurement of the μm sized radius of Gaussian laser beam using the scanning knife-edge[J]. Applied Optics, 1975, 14(12): 2809−2810
6 王和顺, 陈次昌, 黄惟公. CCD测量误差的研究[J]. 光学技术, 2009, 35(3): 402−405
WANG Heshun, CHEN Cichang, HUANG Weigong. Research on the error of CCD[J]. Optical Technique, 2009, 35(3): 402−405
7 Gofron K J, Joachimiak A. Visualization of X-ray beam using CdWO4crystal for macromolecular crystallography[J]. Journal of Systemics, Cybernetics & Informatics, 2011, 9(6): 87−93
8 徐慧超, 周剑英, 龚培荣, 等. YAG晶体在软X射线荧光靶探测器中的应用[J]. 核技术, 2012, 35(8): 587−590
XU Huichao, ZHOU Jianying, GONG Peirong, et al. Application of Ce:YAG as fluorescence screen BPM for soft X-ray beamline at SSRF[J]. Nuclear Techniques, 2012, 35(8): 587−590
9 Chen Z C, Leng Y B, Yuan R X, et al. Study of algorithms of phase advance measurement between BPMs and its application in SSRF[J]. Nuclear Science and Techniques, 2013, 24(1): 010102
CLC TP751, TL271+.7
Real-time analysis technology on the shape of synchrotron radiation beam
ZHANG Chunbo1,2WANG Qisheng1HUANG Sheng1HE Jianhua1
1(Shanghai Institute of Applied Physics, Chinese Academy of Sciences, Zhangjiang Campus, Shanghai 201204, China)
2(University of Chinese Academy of Sciences, Beijing 100049, China)
Background: Synchrotron radiation is a special light produced by synchrotron radiation facility, and has been widely used in many fields because of its properties of broad spectrum, high brilliance and excellent collimation. The beam spot size is one important feature of the beamline. The current method used for measuring the spot size is scanning knife-edge technique, which is accurate but time consuming. Purpose: The aim is to find an effective method to get the spot sizes more quickly and more intuitively based on the image processing. Methods: Basic image processing method and adaptive threshold binarization method are employed to resolve the problem. Results: The results show that the image processing program can get the spot size correctly, although the spot size varies in a large range, and what's more, the new method can show the information about the spot center and spot symmetry simultaneously. Conclusion: The new method is faster and more intuitive compared with the others currently used and it can be considered as an effective diagnosis tool during beamline operation.
Synchrotron radiation spot, Real-time analysis, Digital image processing, Histogram, Adaptive threshold
TP751,TL271+.7
10.11889/j.0253-3219.2015.hjs.38.050102
国家重点基础研究发展计划(No.2011CB911102)、国家自然科学基金青年基金(No.11105216)资助
张春波,男,1988年出生,2012年毕业于哈尔滨工程大学,现为硕士研究生,研究领域为光束线技术
何建华,E-mail: hejh@sinap.ac.cn;汪启胜,E-mail: wangqisheng@sinap.ac.cn
2015-01-21,
2015-03-23