动态火力接入下要地防空作战系统研究
2015-12-02刘敬蜀姜文志代进进
刘敬蜀,姜文志,刘 涛,代进进
(海军航空工程学院,山东 烟台 264001)
海军要地是海军兵力生存和作战依托,是驻屯区域内的海军兵力赖以栖息、修整、恢复战斗力、待机、补给和维修的根据地,也是实施海上作战进攻的出发地,军事战略地位重要。海军要地防空担负海军要地及其辖区范围内的国土防空任务,保护驻防兵力、设施、指挥所、技术阵地、洞库等目标的安全,包括对空预警、远距空中截击、辖区协同防空、要点目标自卫反导等综合防空作战任务[1]。
随着新技术的发展,空袭目标的作战能力得到较大提高,突出体现在电子对抗、机动飞行、低空突防、饱和攻击和防区外攻击等战术的应用,这些战术应用对传统的平台中心战提出挑战。随着信息化的不断推进,网络中心战[2-3]作为一种新的作战概念(Network-Centric Warfare,NCW)应运而生,它的产生对现代军事理论产生了重要影响,针对不同的背景,其具体实现和应用也有所不同,美国海军的协同作战系统[4](cooperative engagement capability,CEC)就是网络中心战在海军编队作战中的具体实现。
为了适应未来我海军要地防空作战的需求,本文基于网络中心战思想,提出动态火力单元接入下要地防空作战系统。它是基于战术指挥控制中心集中指挥,利用计算机、通信与网络技术,将地理上分布的各防空火力单元的作战资源联网成统一高效的防空体系,各防空火力单元可以根据作战任务需求随时接入与退出。在这种作战系统下,要地防空体系的超视距拦截能力、反干扰能力和反隐身能力都将得到大大提高,也能更充分地发挥作战资源的整体效能。
本文运用体系研究的理论和方法,对动态火力单元接入下的要地防空导弹武器系统的作战能力需求、系统的组成与功能结构、作战过程与方式以及系统实现的关键技术等问题进行了深入探讨。
1 作战系统的组成与功能结构
1.1 组成结构
海军要地防空作战的火力单元是指用于海军要地防空的可以独立作战的一组设备。
直接作战设备主要包括通信系统、指挥控制系统、目标探测跟踪系统、制导系统、发射装置、弹(丸)、干扰系统等,基于战术指挥控制中心集中指挥的防空作战系统组成结构如图1所示。
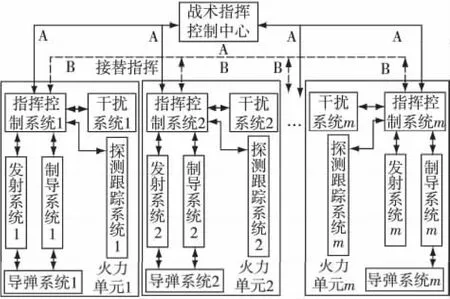
图1 动态火力接入下防空作战系统组成结构
当战术指挥控制中心完好时,接入的m个火力单元通过链路A在战术指控中心组织下进行协同作战。基于网络化作战思想,将火力单元的组成抽象为指挥控制节点、探测跟踪节点、发射节点(包括发射系统和导弹系统)和制导节点,动态火力接入下的防空作战系统不再是火力单元层面的简单组合,而是各作战节点在战术指挥控制中心的集中指挥下,根据作战任务需要以及各节点的状态临时集成为一个面向威胁目标的动态虚拟组织,称其为虚拟火力单元(virtual fire unit,VFU),VFU能够随着任务的变化动态地解体与重组。另外,针对要地防空导弹武器系统的特点,发射节点只接受其所在火力单元指控节点的支配,而探测跟踪节点和制导节点可根据任务需要为其他多个火力单元提供目标以及拦截弹的信息支持。不难发现,VFU就是动态火力接入作战系统下被赋予新的涵义的火力单元概念。
当战术指挥控制中心战损时,指定某火力单元(如火力单元1)进行接替指挥,接入的火力单元通过链路B(图1虚线所示)直接连通进行协同作战;战损的火力单元j(1≤j≤m)退出作战体系,修复好的火力单元可随时接入作战体系。
1.2 功能结构
按照作战资源的功能不同,将动态接入下要地防空作战系统划分为:在战术指挥控制中心集中指挥下,通过地域通信网进行连通的传感器网、指挥控制网和拦截火力网3种逻辑结构,传感器网和火力拦截网通过相对应的指挥控制节点接入通信网,如图2所示。
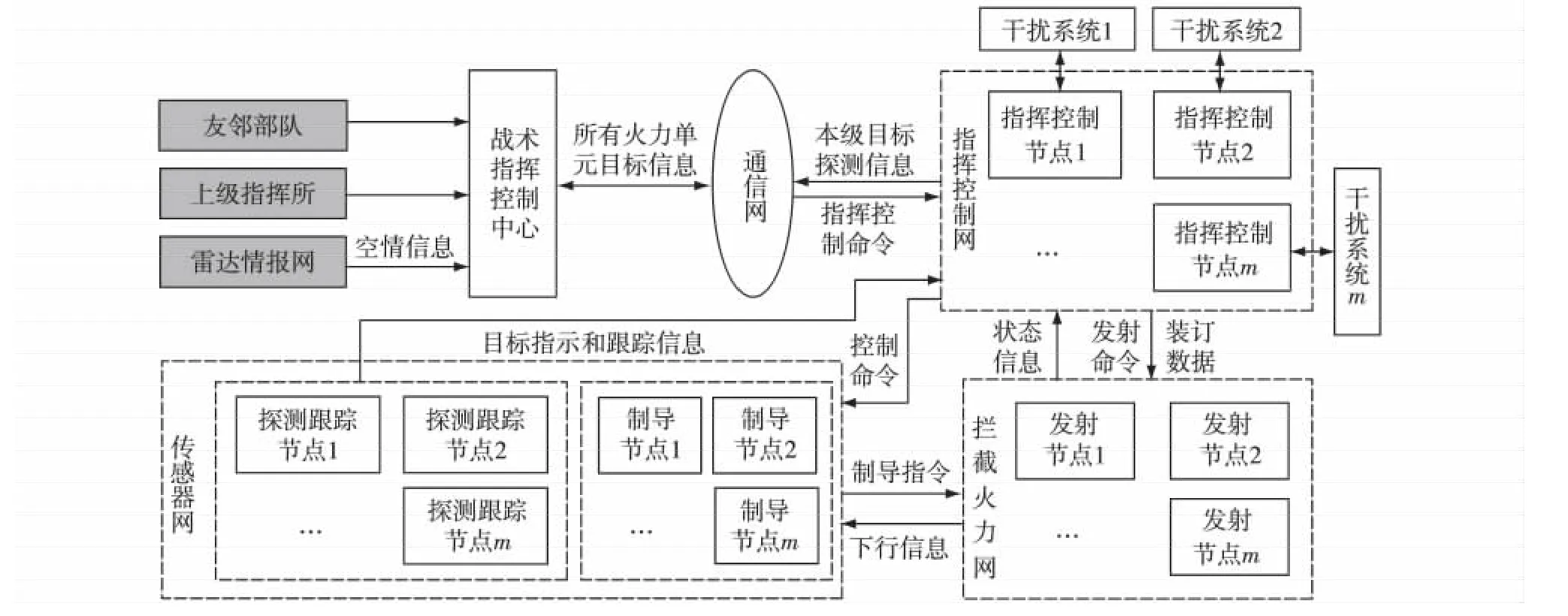
图2 动态火力接入下防空作战系统功能结构
1)战术指挥控制中心
战术指挥控制中心,主要由计算机信息处理系统、显控系统、通信设备以及一些接口设备和辅助设备组成,它通过汇集上级指挥所、友邻部队、预警信息系统以及各火力单元探测跟踪节点的目标信息进行信息融合,并通过地域通信网转发给其他火力单元,各火力单元指控中心统一目标编号以及其他信息,从而形成统一空情信息场;在确定拦截目标的情况下,战术指控中心根据作战任务和火力单元实时状态信息,确定需要动态接入的火力单元指挥控制节点,通过威胁评估、目标分配等决策过程,形成对目标拦截最有利的一个或多个虚拟火力单元,并指挥协调接入的多个火力单元间协同作战。
2)指挥控制网
指挥控制网由动态接入的多个火力单元指控中心组成,每个指控中心视为一个指挥控制节点,它是组织火力、控制武器系统作战的枢纽,其主要功能是完成本级火力单元的指挥控制,实现传感器网和拦截火力网与战术指控中心的信息交互功能。当战术指控中心受损时,可指定某一火力单元指控中心进行接替指挥,其功能不变,但是指挥控制能力将减小。
另外,各火力单元的干扰系统受控于本单元的指控中心,它能够正确响应和执行指控命令,并实时向火力单元指控节点回送自身工作状态,对来袭的反辐射导弹实施有效诱偏。
3)传感器网
传感器网由动态接入防空导弹火力单元的探测跟踪节点和制导节点组成。
探测跟踪节点主要是在较大作战空域内搜索和监测目标,完成对来袭目标的截获和跟踪,从而为指挥控制网提供足够精度的目标跟踪信息;截获并跟踪拦截弹,为指挥控制网提供拦截弹跟踪信息;向指挥控制网提供干扰侦察信息以及雷达状态信息。
制导节点的主要功能是形成并向导弹发送制导指令,接受导弹下行信息,引导导弹飞向目标,动态接入的每一个制导节点可以同时为多个火力单元发射的多枚拦截弹进行制导。
4)拦截火力网
拦截火力网主要由动态接入各火力单元的发射系统和防空导弹组成,发射系统根据指挥控制网的作战指令,做好发射准备和装订发射参数,并发射防空导弹,防空导弹接收制导节点的制导指令,同时向制导节点发送下行指令以此修正弹道,从而实现对目标的准确拦截。
5)通信网
通信网由战术级和火力单元级的通信系统组成,它是实现动态火力接入多火力单元协同作战的基础。地域通信网传输的信息主要包括各火力单元的情报信息、武器状态信息,战术指控中心协同多火力单元作战的指挥命令和控制指令等。
2 动态接入下要地防空作战过程
战术指挥控制中心集中指挥下,各火力单元动态接入的要地防空作战过程如图3所示。
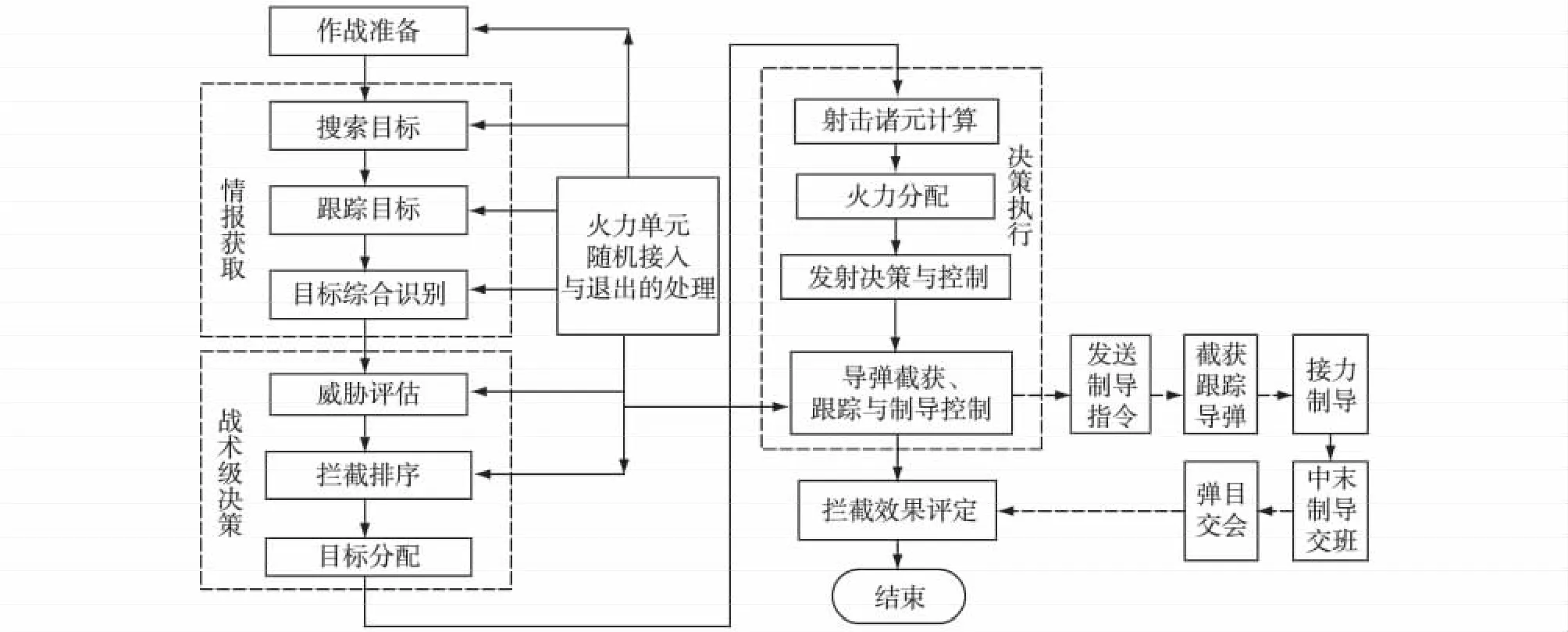
图3 动态火力接入下要地防空作战过程
2.1 作战准备
作战准备阶段,各火力单元根据上级命令和情报信息,设备加电开机、进行自检,武器系统建链,确定武器系统作战方式,进入作战程序。特别地,该阶段增加了火力单元与战术指挥控制中心(或接替指挥的火力单元)之间动态建立通信链路的过程,各火力单元与战术指控中心均预留通信接口,根据作战需要,通过有线或者无线链路实现动态建链。
2.2 情报获取
情报获取包括对目标的搜索跟踪、截获以及综合识别3个环节。在这一阶段,火力单元可以向战术指控中心(或接替指挥的火力单元)提出随机接入与退出申请。传统的火力单元自主作战时,各探测跟踪节点独立工作,相互之间没有信息的交流,而在战术指挥控制中心集中指挥(或火力单元接替指挥)的动态接入防空体系下,各火力单元获取情报是经由战术指控中心融合各级探测信息所得的目标统一空情信息。这种作战体系最大的优势就是各探测跟踪节点在战术指控中心的协调控制下增加了横向协作,当某一火力单元受到干扰或者隐身目标威胁时,战术指控中心可以组织其他探测跟踪节点为其提供目标跟踪、识别信息。
2.3 战术级决策
战术级决策包括威胁评估、拦截排序和目标分配几个环节,由战术指控中心完成,在作战过程中,一旦战术指控中心收到攻击、干扰或出现故障,由指定的火力单元指控中心进行接替指挥,完成决策任务。
1)威胁评估与拦截排序
战术指控中心(或接替指挥的火力单元)指控中心根据统一空情信息场提供的目标信息和各火力单元实时状态参数,进行目标威胁评估,给出目标威胁排序表,进而给出拦截排序。威胁评估的起点是目标被稳定跟踪,终点是目标被击毁或丧失对我方要地进行攻击的能力。目标威胁评估应以整体衡量、综合分析、合理量化为基本要求[5]。到这一阶段,战术指控中心(或接替指挥的火力单元)仍然接受火力单元的随机接入与退出申请。
2)目标分配
由于动态火力接入下,各火力单元通过战术指控中心实现了组网作战,拦截导弹与传感器的组合关系实现解耦,因此,战术指控中心的目标分配任务相应发生变化,就是根据目标威胁排序,将目标依次分配给对其拦截最有利的一个或多个虚拟火力单元,也就是“目标—发射节点—制导节点”三者的优化匹配。
2.4 决策执行
决策执行由虚拟火力单元完成,收到拦截命令的火力单元指控中心协调其配属的虚拟火力单元对目标实施拦截,该过程包括射击诸元计算、拦截适宜性判断、火力分配、导弹发射控制和制导控制5个环节,其中导弹制导控制与火力单元独立作战区别较大,动态接入下的组网作战实现了多个制导节点对拦截弹的接力制导,并且在这一阶段,战术指控中心或接替指挥的火力单元开始接受火力单元的随机接入申请。
2.5 拦截效果评定
参与作战的火力单元指控中心在目标与导弹遭遇时,根据拦截效果评定准则判断是否杀伤目标,火力单元评定完成后,将结果上报战术指控中心或接替指挥的火力单元指控中心,由其进行作战结果统计,完成拦截效果评定。
3 动态火力接入下组网作战方式
基于战术指控中心集中指挥的动态火力接入作战模式,实现了基于协同跟踪数据发射、超视距拦截和接力制导3种组网作战方式。
3.1 基于协同跟踪数据发射
动态火力接入作战模式下,各探测跟踪节点通过战术指控中心集中指挥实现了多传感器集中式组网,从而使火力单元可以利用外部协同跟踪数据发射导弹,导弹发射之后继续依赖发射单元制导节点提供的信息进行制导,如图4所示。
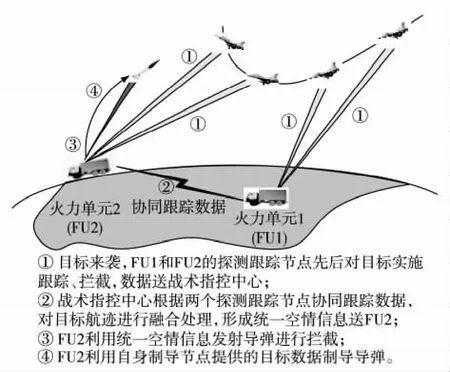
图4 基于协同跟踪数据发射示意图
通过战术指控中心对多个探测跟踪节点信息进行融合处理,可以获得比单个节点更高质量的航迹;同时,由于各探测跟踪节点相对于目标的视角不同,协同跟踪数据可以减少目标的起伏、闪烁、地形遮蔽的影响。另外,协同跟踪过程中,战术指控中心还可以采取频率分集、空间分集以及三角测量等技术来提高反电子干扰能力[6]。
3.2 超视距拦截
超视距拦截是指当火力单元收到指定拦截指令,但本单元探测跟踪节点尚未跟踪目标,可通过战术指控中心获得其他信息源满足航迹质量要求的目标跟踪信息,完成射击诸元计算、导弹参数装订、制导指令形成,并发射导弹拦截目标,如图5所示。要地防空作战中,主要用于解决超低空目标攻击问题。
3.3 接力制导
接力制导是指当火力单元发射导弹后,将拦截弹的跟踪制导权移交给其他火力单元,由其他火力单元对拦截弹接替跟踪、完成制导过程,如图6所示。要地防空作战中,接力制导主要用于解决反辐射导弹(ARM)攻击问题。
4 关键技术
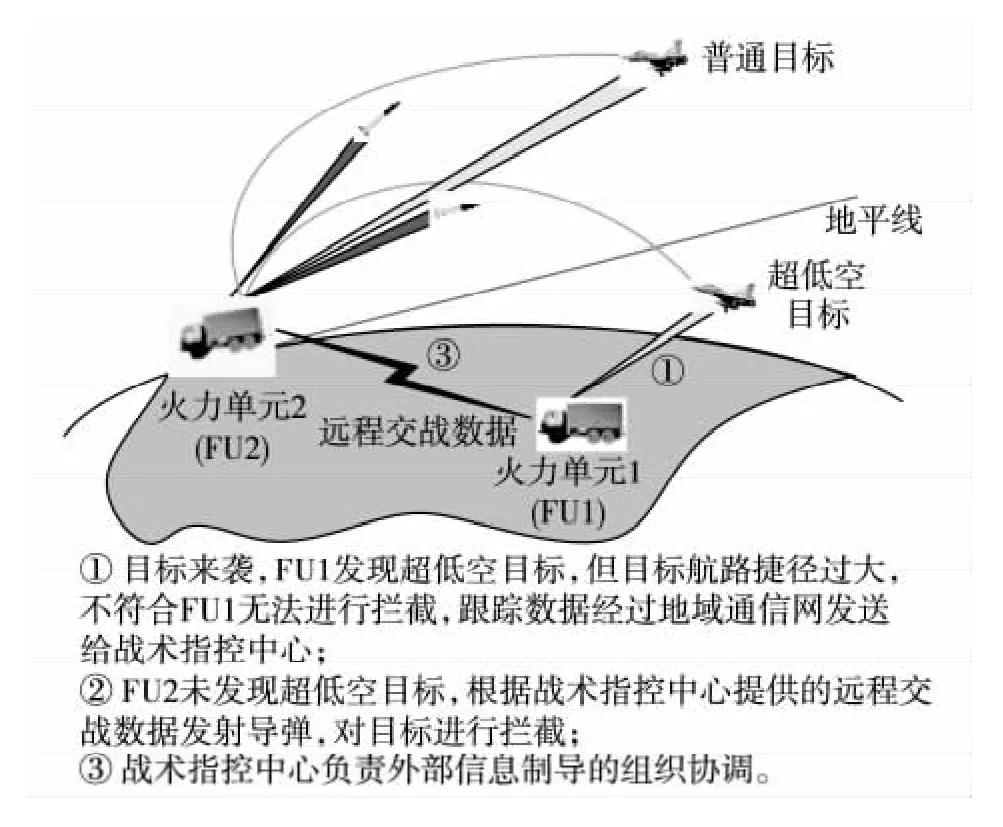
图5 超视距拦截示意图
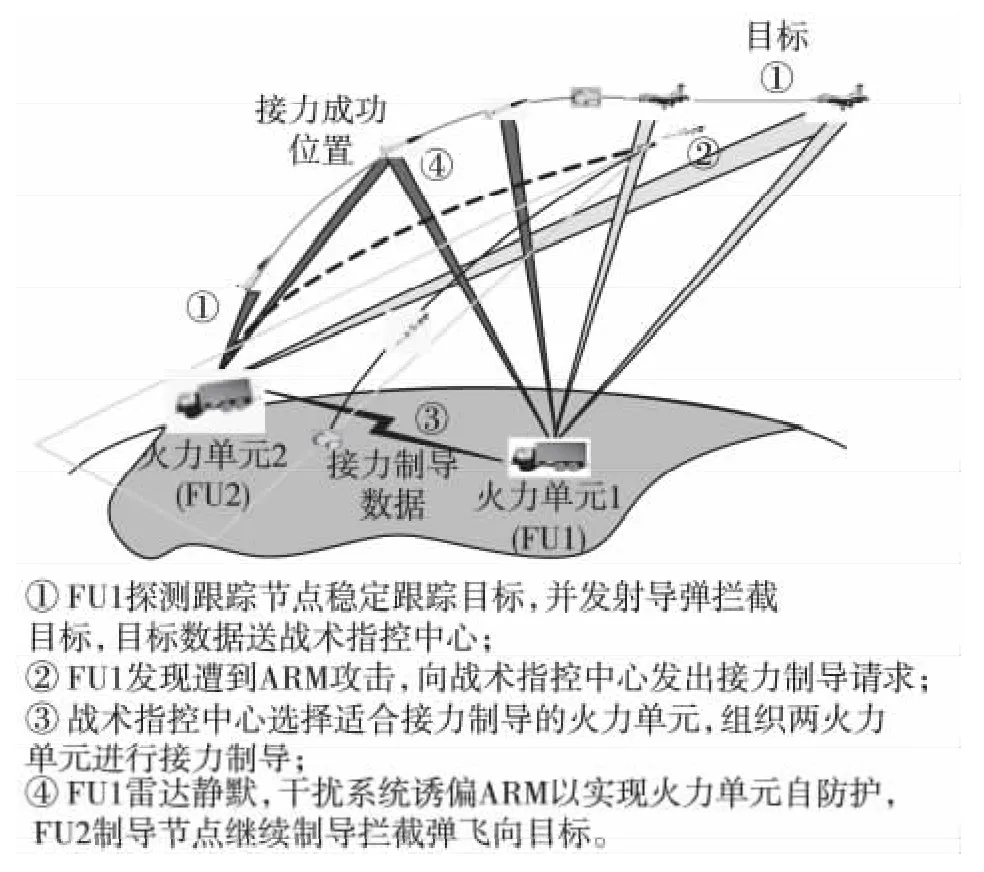
图6 接力制导示意图
动态火力接入下要地防空作战系统的实现涉及到多个领域的关键技术,如高速数据网络技术、多雷达组网技术、多传感器数据融合技术、多武器系统指控控制技术和决策技术等[7],本文重点讨论基于战术指控中心集中指挥的多武器系统动态接入指挥控制技术与决策技术。
4.1 动态火力接入下防空导弹杀伤区构建技术
通过对一般防空导弹杀伤区定义的扩展,动态火力接入下防空导弹杀伤区可以描述为这样一个空域:动态火力接入条件下,在该空域中防空导弹杀伤某特定目标的概率不低于某个给定值。杀伤区通常受到导弹最大飞行斜距、雷达最大跟踪距离和最大制导距离的限制[8-9]。在动态火力接入条件下,各火力单元探测跟踪节点实现了协同探测与跟踪,以及多个制导节点的接力制导,大大增大了对低空、超低空目标的探测距离和制导距离,使得导弹射程得到充分发挥,进而大大改善防空导弹杀伤区的低空超低空特性,因此,动态火力接入作战方式下,必须重新探索防空导弹杀伤区的构建方法,重新建立杀伤区边界计算模型。
4.2 动态火力接入下目标威胁评估技术
威胁评估是一个连续、动态的过程,它贯穿于整个作战过程,从第一个威胁的出现到所有威胁的消失。相比单个火力单元独立作战模式,动态火力接入下的目标威胁评估指标体系以及威胁影响因素都发生了改变,因此,研究动态火力接入下目标威胁评估应以指标体系构建和威胁指标量化两个方面为重点。
在指标体系构建过程中,由于要地防空中,通常是战术单元集中指挥动态接入火力单元保卫多处要地对象,并且一般要地与防空阵地在地理位置上是分离的,个别要地前出于防御阵地,因此,必须充分考虑到各要地相对价值对于目标威胁程度的影响。在威胁指标量化过程中,要充分考虑目标相对其要攻击的要地对象的信息,应深入分析指标对威胁的影响机理,建立合理的量化模型,以尽量减少主观因素的引入。
4.3 动态火力接入下目标分配技术
动态火力接入下组网作战,实现了防空武器系统的协同共用,火力单元变成了发射节点和制导节点的临时构成的虚拟组织,即虚拟火力单元(VFU)。动态火力接入作战下,VFU的组成不是固定不变的,它根据作战任务需要和各作战节点实时状态信息解体和重组,这就使得目标火力通道的组织突破了单个火力单元的限制,战术指控中心根据目标信息决策VFU的组合,再优化VFU与目标的配对,即“发射节点-制导节点-目标”三者的优化匹配问题[10]。
4.4 动态火力接入下要地防空作战仿真技术
当前,计算机仿真已经成为系统分析、研究、测试、评估和训练的重要手段,在作战系统研制方面,其有助于缩短研制周期、减少研制经费[11],因此,动态火力接入下要地防空作战系统要从理论走向设备,计算机仿真是其必由之路。
动态火力接入下要地防空作战过程是一个交互的过程,系统的各功能节点之间存在多种信息的交互,包括状态信息、位置信息和控制信息等[12]。因此,采用HLA构建动态火力接入下要地防空作战仿真系统是行之有效的,为仿真应用中系统间的互通、互联互操作性提供了先进平台和技术路线,满足防空作战系统对灵活性和可扩充性的需求。
5 结束语
动态火力接入条件下,防空火力单元的反应速度、抗饱和能力、抗干扰能力、重组和抗毁能力以及低空超低空特性都得到了大大提升,同时也解决了防空导弹杀伤区受制于单个火力单元探测跟踪距离和制导距离的限制。因此,构建动态火力接入下要地防空作战体系,既是未来海军要地防空的必然趋势,也是要地防空作战由平台中心站向网络中心战转型的必由之路,同时,深入研究其作战体系结构,对于完善动态火力接入下防空组网作战理论体系具有一定的理论指导意义。
[1] 曾宇飞.海军要地防空作战探讨[J].射击学报,2010(2):45-46.
[2] Alberts D S,Garstka G G.Understanding information age warfare[M].ISBN 1-893723-04-6,2000.
[3] Friedman N.网络中心战:海军在三场战争中战略战术的发展[M].赵玉亭,等译.北京:航空工业出版社,2013.
[4] Applied Physics Lab.The cooperative engagement capability[J].Johns Hopkins Technical Digest,1995,16(4):377-396.
[5] 谭安胜.水面舰艇编队作战运筹分析[M].北京:国防工业出版社,2009.
[6] 徐品高.防空导弹体系总体设计[M].北京:宇航出版社,2005.
[7] 滕克难.网络化舰空导弹超视距协同反导的关键技术[J].电光与控制,2012,19(12):1-5.
[8] 董银文,石章松,李云.舰空导弹协同制导杀伤区建立研究[J].指挥控制与仿真,2010,32(6):16-20.
[9] 聂心东,姜文志,刘兵.空舰协同制导下舰空导弹杀伤区低界研究[J].电光与控制,2009,16(6):24-27.
[10]唐苏妍,朱一凡,葛伟,等.网络化防空导弹体系集中式拦截联盟形成方法[J].系统工程理论与实践,2011,31(2):357-363.
[11]周彦,戴剑伟.HLA仿真程序设计[M].北京:电子工业出版社,2002:11-13.
[12]丁海燕,陈建华,宋剑.基于HLA的舰空导弹反导仿真系统的设计与实现[J].系统仿真学报,2009,21(18):5765-5769.
