永磁同步直线电机的滑模变结构控制
2015-12-01李月凡刘军
李月凡 刘军

摘 要:针对永磁同步直线电机的非线性、时变性、强耦合性和外部负载不确定性等特点,在建立、分析永磁同步直线电机d-q轴动态数学模型的基础上,结合传统PID控制的优点,将滑模变结构引入控制器的设计中,设计了一种滑模变结构控制器。利用Matlab对永磁同步直线电机控制系统进行仿真,结果表明,滑模变结构控制具有很好的动态响应性和跟踪性能。
关键词:永磁同步直线电机;PID控制器;滑模变结构;速度控制
中图分类号:TM351 文献标识码:A DOI:10.15913/j.cnki.kjycx.2015.21.020
PID控制器是目前应用最为广泛和成熟的控制器类型之一,它在算法和结构上比较简单,可以满足系统实时性上的需要,而且控制性能稳定,易于实现,因此,PID控制是工程技术人员的首选控制方法。但是,PID控制器也存在一些固有的缺点,比如对控制系统的数学模型要求较精确,不能在线整定PID参数、超调量大、调节过程较长等。直线电机是一个多耦合、非线性时变系统,传统的PID控制器远远不能满足伺服系统的控制要求。控制器的抗扰性是设计控制器的一个重要指标,控制器的控制性能往往是由其对干扰的抑制能力决定的,尤其在永磁同步直线电机的伺服控制系统中,控制器对干扰的鲁棒性更为重要。
针对以上情况,相关人员提出了滑模变结构控制策略。滑模变结构控制既具有控制灵活、适应性强的优点,又具有传统PID控制适用范围广、控制精度高的特点,从而实现了对复杂控制系统和高精度伺服系统的良好控制。
1 永磁同步直线电机的d-q轴数学模型
在d-q坐标系中,PMLSM的电压方程为:
式(6)中:M为运动部分质量;v为次级运动速度;f1为负载;B为黏性摩擦系数。
2 滑模变结构控制器设计
对于PMLSM直线驱动系统,运动方程为:
则速度v的微分方程为:
.
取速度偏移为e=v-v*,v*为给定速度,则速度偏移状态量为:
以速度偏移e 为输入,iq*为滑模控制器输出,选取滑模控制的切换函数为:
当系统运动到滑模面时,有s=0, =0.控制器最终的目标
是使系统在有限的时间内达到并稳定在滑模面上。
本文选取的滑模变结构控制方案为:
式(11)中:ue为系统在s=0时所需的控制量,推导可得ue=ne;us是滑膜切换部分,要保证其沿着滑模线滑向稳定点,实现对不确定性和外加干扰的鲁棒控制。
假设:
根据式(11),在Simulink内建立滑模控制器模型,如图1 所示,并建立Simulink下PMLSM滑模控制的整个模型,如图2所示。
3 系统仿真
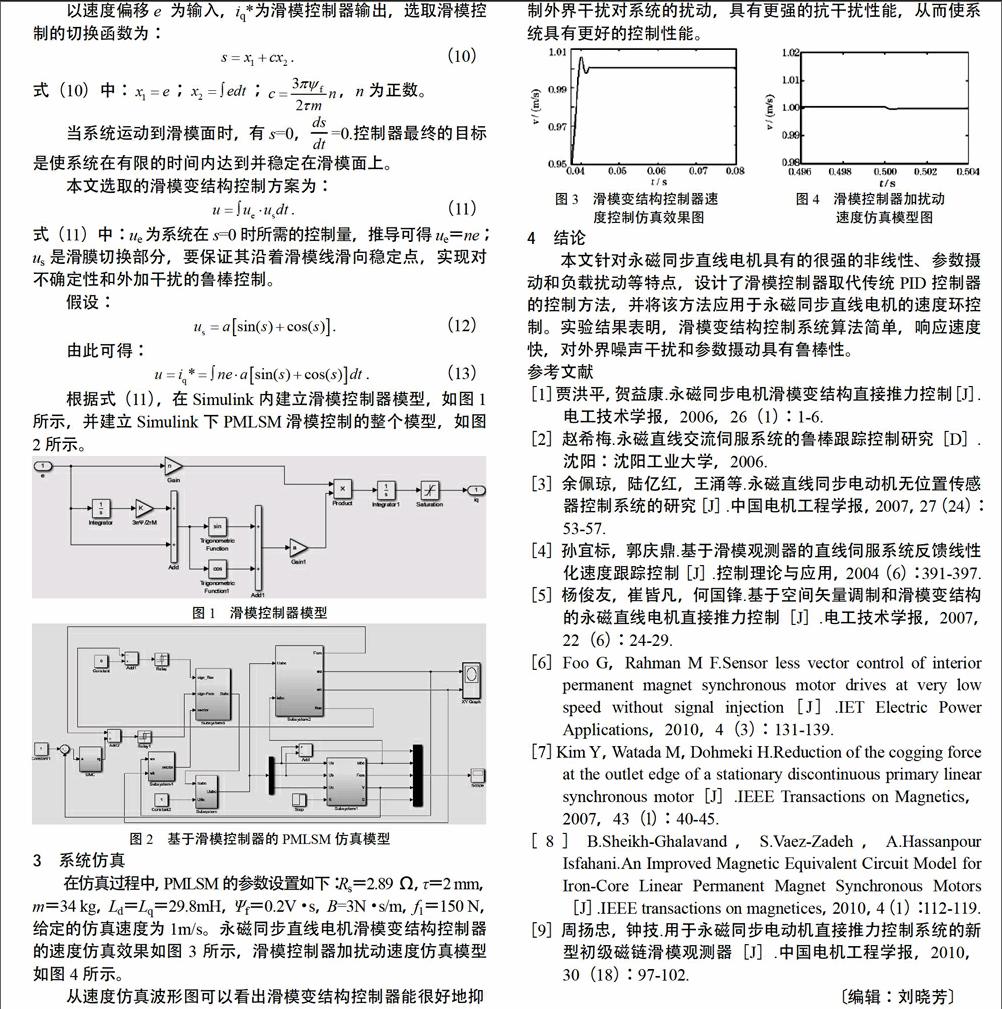
在仿真过程中,PMLSM的参数设置如下:Rs=2.89 Ω,τ=2 mm,m=34 kg,Ld=Lq=29.8mH,Ψf=0.2V·s,B=3N·s/m,f1=150 N,给定的仿真速度为1m/s。永磁同步直线电机滑模变结构控制器的速度仿真效果如图3所示,滑模控制器加扰动速度仿真模型如图4所示。
从速度仿真波形图可以看出滑模变结构控制器能很好地抑
制外界干扰对系统的扰动,具有更强的抗干扰性能,从而使系统具有更好的控制性能。
4 结论
本文针对永磁同步直线电机具有的很强的非线性、参数摄动和负载扰动等特点,设计了滑模控制器取代传统PID控制器的控制方法,并将该方法应用于永磁同步直线电机的速度环控制。实验结果表明,滑模变结构控制系统算法简单,响应速度快,对外界噪声干扰和参数摄动具有鲁棒性。
参考文献
[1]贾洪平,贺益康.永磁同步电机滑模变结构直接推力控制[J].电工技术学报,2006,26(1):1-6.
[2]赵希梅.永磁直线交流伺服系统的鲁棒跟踪控制研究[D].沈阳:沈阳工业大学,2006.
[3]余佩琼,陆亿红,王涌等.永磁直线同步电动机无位置传感器控制系统的研究[J].中国电机工程学报,2007,27(24):53-57.
[4]孙宜标,郭庆鼎.基于滑模观测器的直线伺服系统反馈线性化速度跟踪控制[J].控制理论与应用,2004(6):391-397.
[5]杨俊友,崔皆凡,何国锋.基于空间矢量调制和滑模变结构的永磁直线电机直接推力控制[J].电工技术学报,2007,22(6):24-29.
[6]Foo G,Rahman M F.Sensor less vector control of interior permanent magnet synchronous motor drives at very low speed without signal injection[J].IET Electric Power Applications,2010,4(3):131-139.
[7]Kim Y,Watada M,Dohmeki H.Reduction of the cogging force at the outlet edge of a stationary discontinuous primary linear synchronous motor[J].IEEE Transactions on Magnetics,2007,43(l):40-45.
[8]B.Sheikh-Ghalavand,S.Vaez-Zadeh,A.Hassanpour Isfahani.An Improved Magnetic Equivalent Circuit Model for Iron-Core Linear Permanent Magnet Synchronous Motors[J].IEEE transactions on magnetices,2010,4(1):112-119.
[9]周扬忠,钟技.用于永磁同步电动机直接推力控制系统的新型初级磁链滑模观测器[J].中国电机工程学报,2010,30(18):97-102.
〔编辑:刘晓芳〕
