SIFT算子在多分辨率图像配准中的应用
2015-11-26李维王瑞邓传斌
李维++王瑞++邓传斌
摘 要:为了解决不同分辨率图像的配准问题,提出了一种基于SIFT算子的图像自动配准方法。该方法首先提取图像中适应尺度变化的局部不变特征角点,并利用最近邻特征点距离与次近邻特征点距离相比的方法得到初始匹配点对。仿真试验表明,该方法能够实现不同分辨率图像的自动配准。
关键词:多分辨率;图像配准;SIFT算子;自动配准
中图分类号:TP391.4 文献标识码:A 文章编号:2095-1302(2015)11-0-02
0 引 言
图像配准是对同一场景在不同条件下得到的两幅(或者多幅)图像进行对准、叠加的过程。它广泛地应用于医学成像、运动跟踪、人脸识别等领域,是必不可少的前期工作。图像配准方法大致分为基于图像灰度统计特性配准算法、基于图像特征配准算法和基于图像理解的配准算法。基于图像灰度的配准方法实现简单,但不能校正图像的非线性形变。基于图像特征的配准方法优点在于有效地消除了图像形变、光照问题及干扰噪声等引起的误匹配,配准的速度较快。但是有诸多不足的地方,比如算法复杂,而且在实际中图像被初始化状态、旋转角等因素影响匹配率[1]。目前,对于不同时刻、同一传感器、视角变化不大的图像提取特征点算法的配准方法已经比较成熟。经典的比如:Moravec算子、Susan算子等[2]。对于多传感器、不同分辨率图像进行配准是目前研究的热点和难点[3]。目前使用较多的算法是Harris角点检测图像配准方法[4]。
本文采用尺度不变角点特征来配准不同分辨率图像。配准过程主要包括:提取图像各类特征点,按照特征点空间关系匹配提取精确点集,最后用最小二乘法对图像进行重采样和插值。
1 关于尺度空间
不同分辨率的离散化图像可构成尺度空间。T.Lindeberg等[5-8]提出尺度空间表示的主要思想是,由原始信号(如一幅图像)生产一系列信号,并用这些信号来表示原始信号,在这一过程中,精细尺度的信息被逐步的平滑掉。尺度可变高斯函数定义为:
(1)
尺度空间通过用高斯函数对图像做卷积得到。比如一幅图像的多尺度空间L(x,y;σ)由高斯核函数G(x,y;σ)与输入图像I(x,y)进行卷积得到,即:
L(x,y;σ)=G(x,y;σ)*I(x,y) (2)
其中:(x,y)表示二维图像的像素坐标,σ为尺度空间因子。为了得到图像像素点,只需给σ赋不同的值即可。由公式(1)和公式(2)可以看出:当尺度因子σ=0时,得到的卷积值就是原图像。即:
L(x,y,0)=G(x,y,0)*I(x,y)= I (x,y) (3)
2 SIFT特征点的确定与表述
2.1 尺度空间极值点检测
在尺度空间中,检测特征点就是找到极值点。为了寻找极值点,每一个采样点要和它所有的相邻点作比较,看其是否比它的图像域和尺度域的相邻点大或者小。为了保证尺度空间和二维图像空间都检测到极值点,选择待检测点与空间相邻的8个点以及上下相邻尺度对应位置的9×2个点总共26个点的像素值进行比较。
2.2 确定关键点位置
选择关键点的依据是它们的稳定程度,通过最小二乘法拟合以确定点的位置和尺度。同时去除低对比度的关键点和不稳定的边缘响应点,以增强匹配稳定性,提高抗噪性能。
由于一个定义不好的高斯差分算子的极值在横跨边缘的地方有较大的主曲率,而在垂直边缘的方向有较小的主曲率。主曲率通过一个2×2的Hessian矩阵H求出:
(4)
导数由采样点相邻差估计得到。
D的主曲率和H的特征值成正比,令α为最大特征值,β为最小的特征值,不直接求特征值,求Tr(H)与
由式(7)可看出:(γ+1)2/γ的值在α和β的值相等时最小,γ的取值越大,其值也越大,因此,要检测主曲率是否在某阈值γ下,只需用下式检测即可:
,Lowe[9]在文章中提出取γ=10。
2.3 特征点方向的确定
关键特征点的位置确定后,再确定其尺度和方向。利用特征角点邻域像素的梯度方向分布特性,为每个特征点指定方向参数。将坐标轴移至关键特征点主方向,旋转后得到邻域内采样点的坐标。在窗口宽度为16×16的区域内计算8个方向梯度方向直方图,即可形成一个种子点。再向下一个4×4区域内进行直方图统计,计算每个子区域的直方图,生成下一个种子点;再根据尺度对4×4区域内特征描述向量进行排序,这样就形成了一个128维的向量,最后对描述子向量进行规范化处理,便生成了SIFT特征向量。
3 仿真结果
采用Matlab仿真软件对不同分辨率图像配准进行验证。
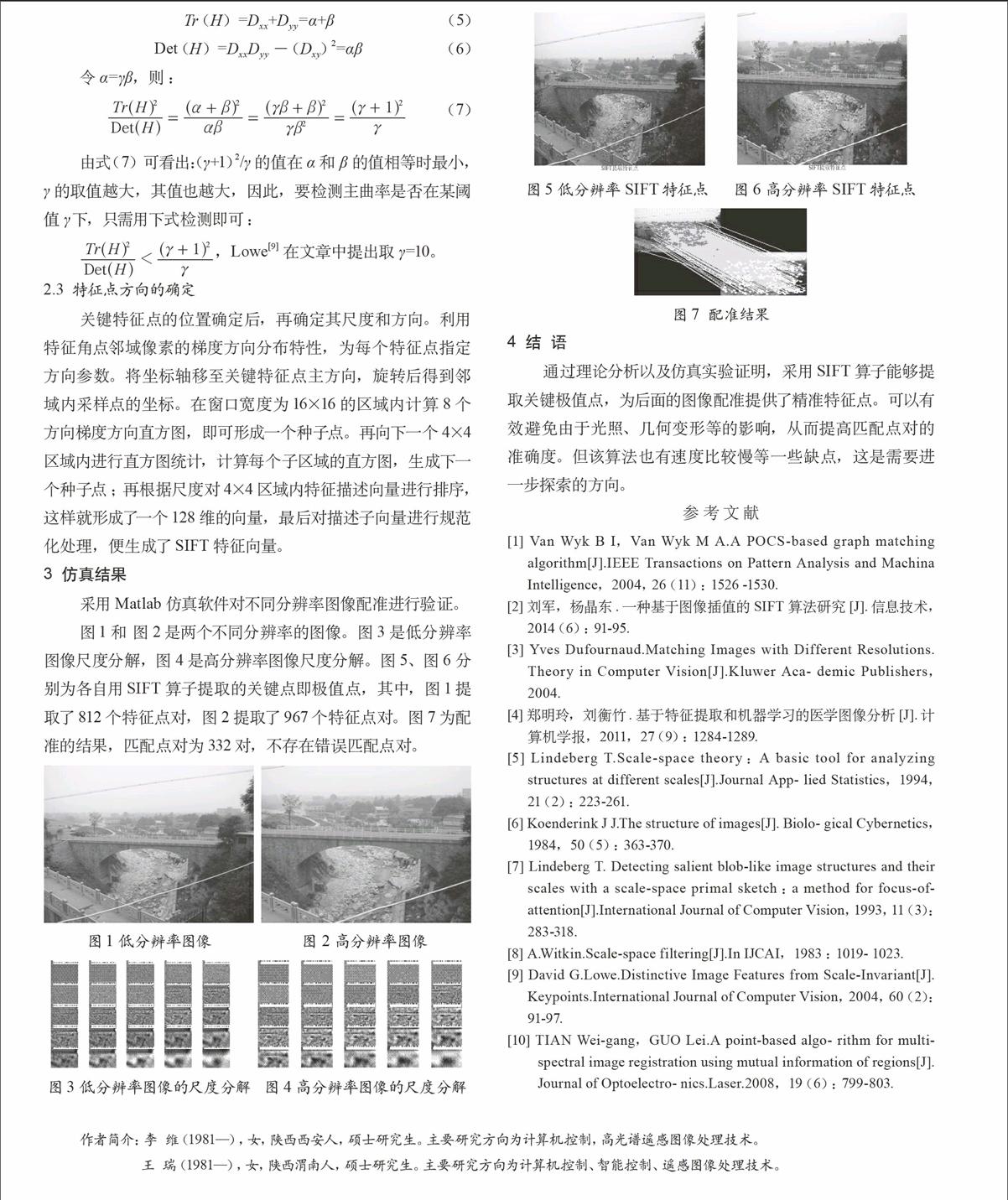
图1和 图2是两个不同分辨率的图像。图3是低分辨率图像尺度分解,图4是高分辨率图像尺度分解。图5、图6分别为各自用SIFT算子提取的关键点即极值点,其中,图1提取了812个特征点对,图2提取了967个特征点对。图7为配准的结果,匹配点对为332对,不存在错误匹配点对。
图1 低分辨率图像 图 2 高分辨率图像
图3 低分辨率图像的尺度分解 图4 高分辨率图像的尺度分解
图5 低分辨率SIFT特征点 图6 高分辨率SIFT特征点
图7 配准结果
4 结 语
通过理论分析以及仿真实验证明,采用SIFT算子能够提取关键极值点,为后面的图像配准提供了精准特征点。可以有效避免由于光照、几何变形等的影响,从而提高匹配点对的准确度。但该算法也有速度比较慢等一些缺点,这是需要进一步探索的方向。
参考文献
[1] Van Wyk B I,Van Wyk M A.A POCS-based graph matching algorithm[J].IEEE Transactions on Pattern Analysis and Machina Intelligence,2004, 26(11):1526 -1530.
[2] 刘军,杨晶东.一种基于图像插值的SIFT算法研究[J].信息技术,2014 (6):91-95.
[3] Yves Dufournaud.Matching Images with Different Resolutions.Theory in Computer Vision[J].Kluwer Aca- demic Publishers,2004.
[4]郑明玲,刘衡竹.基于特征提取和机器学习的医学图像分析[J].计算机学报,2011,27(9):1284-1289.
[5] Lindeberg T.Scale-space theory: A basic tool for analyzing structures at different scales[J].Journal App- lied Statistics,1994,21(2):223-261.
[6] Koenderink J J.The structure of images[J]. Biolo- gical Cybernetics, 1984,50(5): 363-370.
[7] Lindeberg T. Detecting salient blob-like image structures and their scales with a scale-space primal sketch:a method for focus-of-attention[J].International Journal of Computer Vision,1993,11(3):283-318.
[8] A.Witkin.Scale-space filtering[J].In IJCAI,1983:1019- 1023.
[9] David G.Lowe.Distinctive Image Features from Scale-Invariant[J].Keypoints.International Journal of Computer Vision,2004,60(2):91-97.
[10] TIAN Wei-gang,GUO Lei.A point-based algo- rithm for multi-spectral image registration using mutual information of regions[J].Journal of Optoelectro- nics.Laser.2008,19(6):799-803.
