Nonlinear Intelligent Flight Control for Quadrotor Unmanned Helicopter
2015-11-21ZhenZiyang甄子洋PuHuangzhong浦黄忠ChenQi陈琦WangXinhua王新华
Zhen Ziyang(甄子洋),Pu Huangzhong(浦黄忠),Chen Qi(陈琦),Wang Xinhua(王新华)
1.College of Automation Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,P.R.China;
2.UAV Research Institute,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,P.R.China
Nonlinear Intelligent Flight Control for Quadrotor Unmanned Helicopter
Zhen Ziyang(甄子洋)1*,Pu Huangzhong(浦黄忠)2,Chen Qi(陈琦)1,Wang Xinhua(王新华)1
1.College of Automation Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,P.R.China;
2.UAV Research Institute,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,P.R.China
Quadrotor unmanned helicopter is a new popular research platform for unmanned aerial vehicle(UAV),thanks to its simple construction,vertical take-off and landing(VTOL)capability.Here a nonlinear intelligent flight control system is developed for quadrotor unmanned helicopter,including trajectory control loop composed of co-controller and state estimator,and attitude control loop composed of brain emotional learning(BEL)intelligent controller.BEL intelligent controller based on mammalian middle brain is characterized as self-learning capability,model-free and robustness.Simulation results of a small quadrotor unmanned helicopter show that the BEL intelligent controller-based flight control system has faster dynamical responses with higher precision than the traditional controller-based system.
quadrotor unmanned helicopter;flight control;brain emotional learning(BEL);intelligent control
0 Introduction
Quadrotor unmanned helicopter is an emerging rotorcraft concept for unmanned aerial vehicle(UAV).This type of aircraft consists of four rotors with two pairs of counter-rotating,fixedpitch blades located at the four corners.Thanks to its specific capabilities in surveillance,search and rescue,the quadrotor unmanned helicopter is widely researched by scholars and engineers. However,trajectory control with high performance of quadrotor unmanned helicopter was indispensable for real applications.A direct approximate-adaptive control using cerebellar model articulation controller(CMAC)nonlinear approximators for an experimental prototype quadrotor unmanned helicopter is investigated in Ref.[1]. A quaternion-based feedback that considered a priori input bounds was developed and experimentally applied to the attitude stabilization of a quadrotor mini-helicopter[2].Moreover,a switching model predictive attitude controller based on a piecewise affine model of the attitude dynamics was designed,and verified by experiments in the execution of sudden maneuvers subject to forcible wind disturbances[3].
Recent researches have verified the importance of emotion in animal behavior and even human decision-making process.Therefore,modeling of the emotional learning process attracts many researchers.Some of them focus on internal representation of emotional learning to formalize the brain reaction to emotional stimuli.In Ref.[4],a computational model of amygdala and context-processing was presented,called the brain emotional learning(BEL)model.BEL model learns to react to new stimuli on a basis of generating reward signals.Amygdala learns to associate between emotionally charged and neu-tral stimuli,while the orbitofrontal cortex inhabits inappropriate experience and learning connection.As a biological computing system,BEL model can be conceptualized as a new type of artificial neural network,and it is also parallel and distributed.BEL model has been utilized for controlling several real systems.Based on the cognitively motivated open loop model,a BEL-based intelligent controller was originally introduced in Ref.[5],and was utilized in several real system control applications,such as electrically heated micro-heat exchanger plant[6],washing machine[7],laboratorial overhead crane[8],and flight simulation turntables[9-10].Moreover,the obtained embedded and model-free controller can be applied to other systems with different platforms,and the reusability and extendibility of models are considered in different models.
*Corresponding author:Zhen Ziyang,Associate Professor,E-mail:zhenziyang@nuaa.edu.cn.
How to cite this article:Zhen Ziyang,Pu Huangzhong,Chen Qi,et al.Nonlinear intelligent flight control for quadrotor unmanned helicopter[J].Trans.Nanjing U.Aero.Astro.,2015,32(1):29-34.
http://dx.doi.org/10.16356/j.1005-1120.2015.01.029
Here,the BEL model is initially used for attitude control of a quadrotor helicopter,and is associated with a nonlinear controller to control the flight trajectory.The purpose is to develop a reliable intelligent controller with higher performance.
1 Model Descriptions of Quadrotor and BEL
1.1 Quadrotor helicopter model
The quadrotor unmanned helicopter is a complex mechanical system that collects numerous physical effects from mechanics and aerodynamics domains.The structure of quadrotor is supposed to be rigid and symmetrical.Based on the system modeling method in Ref.[11],a nonlinear model of the quadrotor unmanned helicopter is given in the following.The rotation of quadrotor unmanned helicopter in space can be parameterized using Euler angles,quaternions and Tait-Bryan angles.The axes are directed as for a craft moving in the positive x direction,with the right side corresponding to the positive y direction,and the vertical underside corresponding to the positive z direction.Considering a right-hand oriented coordinate system,there are three angles(θ,φ,ψ)individually called pitch,roll and yaw.The body angular rates(p,q,r)are physically measured with gyroscopes.
The dynamic model is derived using Euler-Lagrange formalism.If applying small angle approximation,the dynamics of the rotation subsystem becomes




The quadrotor system model can be rewritten in a state-space form

with U inputs vector and X state vector chosen as follows

The transformation matrix between the rate of change of the orientation angles and the body angular rates can be considered as a unity matrix if the perturbations from hover flight are small. Then,we suppose that.U1is a control input for line movement on the z axis,U2a control input for roll movement,U3a control input for pitch movement,and U4a control input for yaw movement.
1.2 BEL algorithm model
Amygdala receives inputs from sensory input,orbitofrontal cortex and hypothalamus. There is one node for one stimulus,including the one only for thalamic stimulus.The thalamic connection is calculated as the maximum overall sensory input,and becomes another input to amygdala.Eor each node in amygdala,there is a plastic connection weight,also called learning weight.Any input signal is multiplied by this

where Aiand Viare the output and learning weight of the i-th node in amygdala,Sithe i-th sensory input,and Aththe hypothalamus output.
Orbitofrontal cortex is another important part of BEL model that makes a quick response to negative signal.The nodes behave analogously,with a connection weight applied to the input signal to create an output.Thus,the node output in orbitofrontal cortex can be given by

where Wiis the learning weight of the i-th node in orbitofrontal cortex.
There is one output node for the BEL model,which is calculated by[4]connection weight to provide the output of the node,such that

And likewise,there is another node that sums the outputs from nodes in amygdala except Athand then subtracts from inhibitory outputs of the nodes in orbitofrontal cortex.The output of this node is calculated by

The connection weights of the nodes in amygdala are adjusted proportionally to the difference between the emotional stress and the activation.The orbitofrontal cortex detects when expectations are not fulfilled and inhibits an improper emotional response.Hence,variations of the weights called as learning rules can be expressed by[4]

whereαAandαOdenote the learning rates in amygdala and orbitofrontal cortex,respectively. R denotes the reward signal,i=1,2,…,n.They are constants used to adjust the learning speed.
2 Design for Flight Control System of Quadrotor Helicopter
2.1 Flight trajectory control loop design
According to the centroid kinematics equa-tions of quadrotor unmanned helicopter,by neglecting some nonlinear property parts,we obtain a relationship between the centroid acceleration and the external force shown as

where Tx,Ty,Tzare the three components of lift force in ground axes,and


where
Therefore,an attitude estimator to get the control laws is designed as


where Kx,Ky,Kz1and Kz2are the constant control gains.
2.2 Flight attitude control loop design
Adaptation and specialization are key properties of all biological organisms.Therefore,BEL model is used to design a flight attitude controller for quadrotor unmanned helicopter.We apply respectively four BEL algorithms in four control channels.BEL intelligent controller has some sensory inputs.One of the designer′s tasks is to determine the sensory inputs.BEL intelligent controller has two states for each sensory inputs. One is amygdala output and another is orbitofrontal cortex output.Therefore the selection of sensory inputs is a key problem for BEL intelligent controller.
The height control law is designed as where the co-controllers are designed by

where Ez(·)is the output of BEL model for height control loop.wz1,wz2and wz3are constant coefficients.
The rolling control law is designed as

where Eφ(·)is the output of BEL model for rolling control loop,here Ath=0,wφ1,wφ2and wφ3are constant coefficients.
The pitching control law is as follows

where Eθ(·)is the output of BEL model for pitching control loop,here Ath=0,wθ1,wθ2and wθ3are constant coefficients.
The yawing control law is designed as

where Eψ(·)is the output of BEL model for yawing control loop,here Ath=0.wψ1,wψ2and wψ3are constant coefficients.
2.3 Flight control system structure
According to the designed trajectory controller and attitude controller,a flight control system of quadrotor unmanned helicopter is establishedin Eig.1.Eor the quadrotor unmanned helicopter,the difficulty of designing the control system is that the movements on x-axis and y-axis are under-actuated,which are controlled by pitching angle and rolling angle respectively.The trajectory controller is divided as two parts:co-controller and attitude estimator.The former is designed by Eqs.(14—17),and the latter by Eq.(13).The attitude controller is expressed using Eqs.(18—29).

Eig.1 BEL-based intelligent flight control system for quadrotor helicopter
3 Simulation Analysis
The simulations of two control techniques are presented,including the traditional control scheme and the BEL intelligent control scheme for the flight control of a quadrotor unmanned helicopter.Both of them have the same trajectory controllers but different attitude controllers.The traditional attitude controller adopts proportionalintegral-derivative(PID)scheme,the control gains of which are same with constant coefficients w in BEL controller.The nonlinear model of the quadrotor unmanned helicopter is given by Eqs.(1—3).

Eig.2 Height control responses
Eigs.2—4 show the height movement,xaxis movement and y-axis movement responses under the two different control schemes,respec tively.In the response curves,the closed-loop system performance using BEL intelligent controller is compared with that of traditional controller.In simulation results,BEL intelligent controller can settle faster with less distortion. The learning capability of BEL can also bring about several advantages,such as robustness against noise and model uncertainties,if the learning parameters are well tuned.
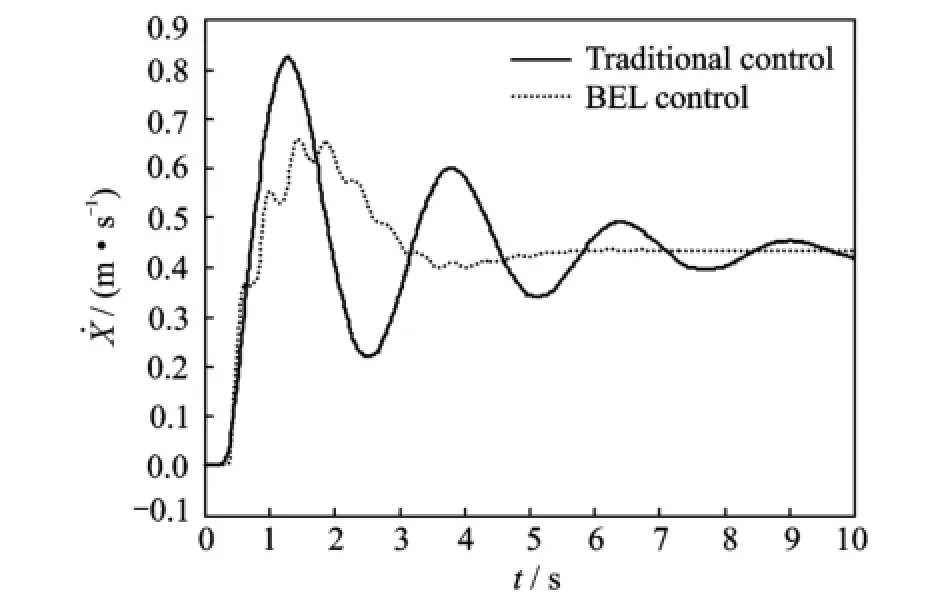
Eig.3 Movement responses on x-axis

Eig.4 Movement responses on y-axis
4 Conclusions
A novel flight control system for quadrotor unmanned helicopter is investigated,in which a co-controller and a state estimator are developed in trajectory control loop,and a BEL intelligent controller based on brain emotional processes in limbic system is applied to the attitude control loop.The performance of the BEL-based closedloop control system of quadrotor unmanned helicopter is compared with that of the traditional controller.Simulation results exhibit that the BEL intelligent flight control system is superior to the traditional one in terms of control characteristics such as response and accuracy.
In all,the BEL intelligent control is a reliable and effective control method,and is simple in implementation and flexible in high performance applications.East auto learning and high control potency of BEL intelligent control promise more real engineering applications.By choosing the sensory input signals,the BEL intelligent control method enables the designer to shape the response in accordance with the multiple objectives of choices.However,the convergence of the BEL algorithm and the stability of BEL-based control system need to be further studied in future.
Acknowledgements
This work was supported in part by the National Natural Science Eoundation of China(No.61304223),the Specialized Research Eund for the Doctoral Program of Higher Education(No.20123218120015),the Eundamental Research Eunds for the Central Universities(No. NZ2015206),and the Aeronautical Science Eoundation of China(No.2010ZA52002).
[1] Nicol C,Macnab C J B,Ramirez-Serrano A.Robust adaptive control of a quadrotor helicopter[J]. Mechatronics,2011,21(6):927-938.
[2] Guerrero-Castellanos J E,Marchand N,Hably A,et al.Bounded attitude control of rigid bodies:Realtime experimentation to a quadrotor mini-helicopter[J].Control Engineering Practice,2011,19(8): 790-797.
[3] Alexis K,Nikolakopoulos G,Tzes A.Switching model predictive attitude control for a quadrotor helicopter subject to atmospheric disturbances[J].Control Engineering Practice,2011,19(10):1195-1207.
[4] Moren J,Balkenius J.A computational model of emotional learning in the amygdala:Erom animals to animals[C]∥Sixth International Conference on the Simulation of Adaptive Behavior.Cambridge,USA: MIT Press,2000:383-391.
[5] Lucas C,Shahmirzadi D,Sheikholeslami N.Introducing BELBIC:Brain emotional learning based intelligent controller[J].Intelligent Automation and Soft Computing,2004,10(1):11-22.
[6] Rouhani H,Jalili Kharaajoo M,Araabi B N,et al. Brain emotional learning based intelligent controller applied to neurofuzzy model of micro heat exchanger[J].Expert System Applications,2007,32(3):911-918.
[7] Milasi R M,Jamali M R,Lucas C.Intelligent washing machine:A bio-inspired and multi-objective approach[J].International Journal of Control,Automation,and Systems,2007,5(4):436-443.
[8] Jamali M R,Arami A,Hosseini B,et al.Real time emotional control for anti-swing and positioning control of SIMO overhead traveling crane[J].International Journal of Innovative Computing,Information and Control,2008,4(9):2333-2344.
[9] Zhen Ziyang,Wang Daobo,Wang Zhisheng,et al. Inverse model compensation control of turntable based on brain emotional learning[J].Journal of Applied Sciences,2009,27(3):326-330.
[10]Zhen Ziyang,Wang Daobo,Wang Zhisheng.Design of brain emotional learning model based turntable servo system[J].Chinese Space Science and Technology,2009,29(1):13-18,25.
[11]Bouabdallah S.Design and control of quadrotors with application to autonomous flying[D].Lausanne,Switzerland:Ecole Polytechnique Eederale de Lausanne,2007.
(Executive editor:Zhang Tong)
TP273;O321 Document code:A Article ID:1005-1120(2015)01-0029-06
(Received 18 November 2014;revised 2 January 2015;accepted 12 January 2015)
猜你喜欢
杂志排行
Transactions of Nanjing University of Aeronautics and Astronautics的其它文章
- CRB for 2-D DOA Estimation in MIMO Radar with UCA
- Flight Dynamic Analysis of Hypersonic Vehicle Considering Liquid-Solid Coupling
- Tradeoff Analysis of Factors Affecting Longitudinal Carrier Landing Performance for Small UAV Based on Backstepping Controller
- Improved Shuffled Frog Leaping Algorithm Optimizing Integral Separated PID Control for Unmanned Hypersonic Vehicle
- Beamforming of Whole Airspace Phased Array TT&C System Based on Linear Subarrays
- Trim Drag Prediction for Blended-Wing-Body UAV Configuration