采用图像增强的图像特征点匹配算法
2015-11-19黄超
黄超
(枣庄学院 信息科学与工程学院,山东 枣庄277160)
图像特征匹配[1-4]的目的是在同一场景的图像中找到相应的特征,如点特征或线特征[5-6].由于成像条件的影响,采集图像的同一区域,不仅在不同情境的表观不同,而且图像的对应区域之间存在射影畸变[7-8].此时,对图像进行特征点的提取和匹配,其准确性会受到严重影响.针对此问题,可以对图像采取前期的预处理,去除图像中的无关信息,恢复图像中的真实信息,使图像的信息便于检测,从而增强图像的质量.这种预处理也使特征提取、匹配和识别的可靠性得到了提高.本文提出了利用直方图均衡化、基于照明-反射模型的同态滤波和基于Retinex理论的增强方法对收集到的图像进行预处理,再对预处理后的图像应用尺度不变特征转换(SIFT)算法[9],加速健壮特征(SURF)算法[10]和仿射-尺度不变特征转换(ASIFT)[11]算法进行图像特征提取和匹配.
1 图像增强的预处理结果分析
1.1 直方图均衡化
直方图均衡化是一个非线性处理过程,也是一种使用图像直方图进行对比度调节的方法,其目的是获得更开阔和更均匀的分布.通过使用更适应人类视觉分析的方法,使较低对比度的区域获得更高的对比度,从而增强图像的亮度,该方法适用于图像呈现出非常紧凑的像素对比度的情况[12-13].通过这种调节,图像像素灰度会在直方图上有一个比度.直方图均衡化的实现依赖于能够将最常用的像素灰度值分布进行有效扩展的方案,利用多个直方图完成局部对比度的调节而不是完成整体对比度的调节,是自适应直方图均衡化,以实现图像局部对比度的调节.
图像直方图均衡化处理的结果,如图1所示.由图1可知:从处理效果来看,图像对比度明显得到增强,处理后的图像灰度分布更均匀,可以获得满意的图像效果.利用图像的频率信息,将图像的高频部分与低频部分分离,使图像在保留较多原始灰度图像分布的同时,达到更有吸引力的平衡.根据直方图均衡化算法和调用Matlab中的Histeq函数处理,可以看出图像的效果非常近似.
1.2 基于照明-反射模型的同态滤波
基于照明-反射模型的同态滤波原理是通过滤波函数估算图像的低频或高频成分,增强图像局部对比度,同时压缩图像动态范围[14].图像上照明不均的问题得以排除,进而对图像灰度范围加以调整,暗区域的图像细节得到了增强,图像亮区的图像细节也得到了保存,这便是应用滤波的目的.

图1 图像直方图均衡化预处理结果Fig.1 Image histogram equalization preprocessing results
图像I(x,y)表达式为

式中:L(x,y)为照明分量,描述了景物的照明,与景物无关,0<L(x,y)<∞;R(x,y)为反射分量,包括了目标的细节,它与照明无关,0<R(x,y)<1.
同态滤波的流程为I(x,y)→logI→DFT→H(u,v)→(DFT)-1→exp→O(x,y).式中:logI为对I取对数;DFT 为对数据作傅里叶变换;H(u,v)为对数据进行滤波;(DFT)-1为对数据作反傅里叶变换;exp为对数据作指数变换;O(x,y)为处理后的图像数据.
应用图像增强方法对图像进行预处理的结果,如图2所示.由图2可知:同态滤波器能增加图像高频的贡献,消减图像低频的贡献;同时,完成动态范围的压缩和对比度的增强.显然,经同态滤波预处理后,图像的视觉效果明显优于原图像,而且图像细节更清晰.
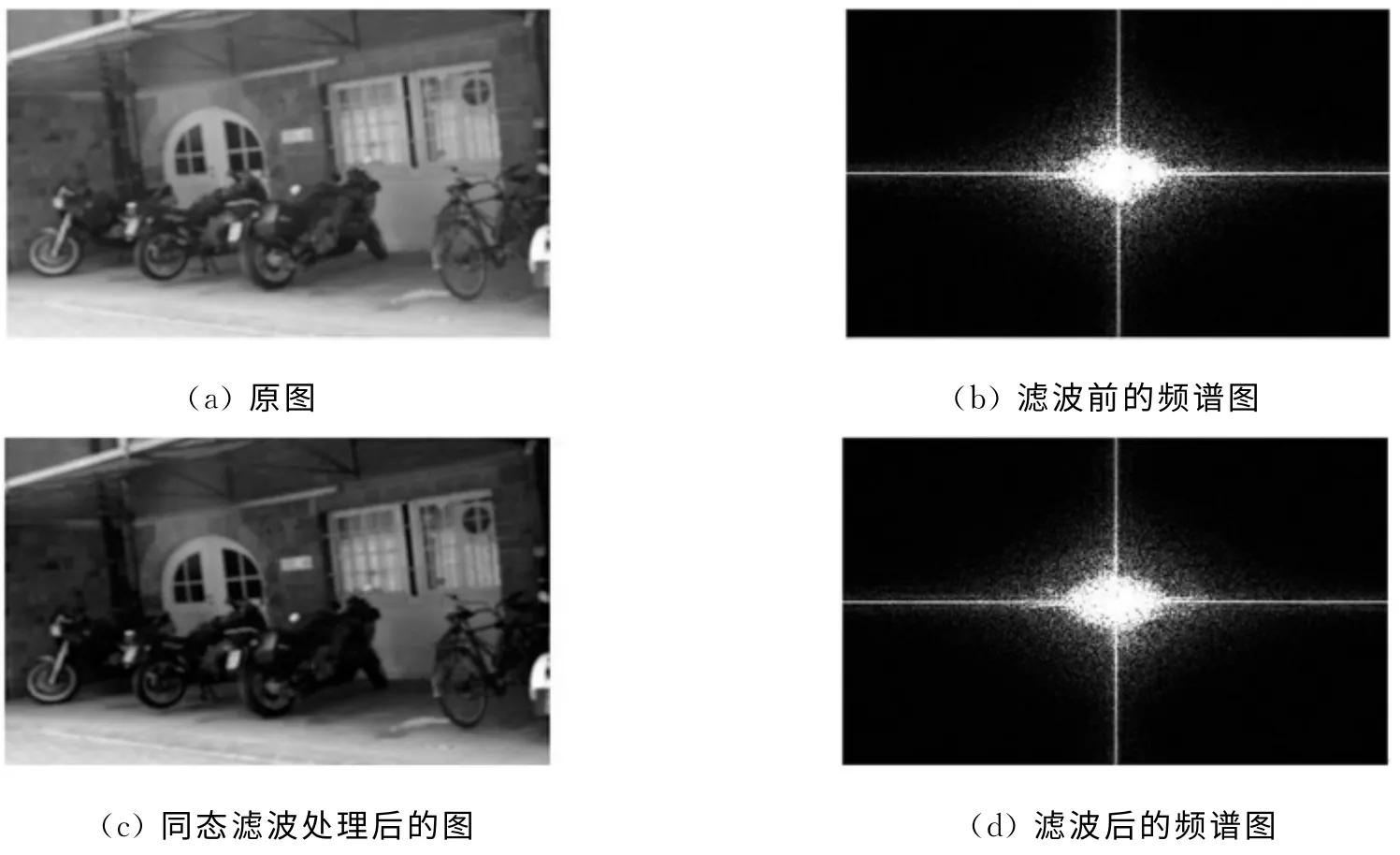
图2 图像同态滤波的预处理结果Fig.2 Preprocessing results of image homomorphism filtering
1.3 基于Retinex理论
由Retinex算法的原理可知:在不同光源或光线下,相同物体的颜色是恒定不变的.图像I(x,y)被分解为物体的反射图像R(x,y)和亮度图像L(x,y).图像的内在性质由R(x,y)决定,图像像素的动态范围由L(x,y)决定.物体的反射性质需要从图像I(x,y)中取得.通过降低亮度图像对反射图像的影响,达到图像增强的目的.
为了便于算法的计算,对公式进行对数处理.对数处理有2个优点:1)对数形式,更靠近于人眼亮度的感知能力;2)可以将复杂的乘积形式变为简单的加减形式.即logI(x,y)=log(R(x,y)·L(x,y))=logR(x,y)+logL(x,y).记i(x,y)=r(x,y)+l(x,y).由此可以得到增强模型为

式中:G(x,y)为低通卷积函数,作用是从输入图像中估计亮度图像L(x,y).同时,对输入图像局部进行处理而采用高斯卷积函数,采用此函数又能更好地增强图像.是尺度常量.c的值越小,图像灰度动态范围被压缩的越多;相反,c的值越大,图像将被锐化的越厉害.λ是常量矩阵,使得,进而得到R(x,y),从而得到了增强后的图像.
Retinex算法实质上是一种基于光照补偿的图像增强算法,其核心部分是照射分量估计.它能够将原图像中的绝大多数细节信息还原,同时还避免了由直方图均衡化算法造成的两极分化趋势,增强后图像的画质较为柔和,图像在视觉效果上变得更好.Retinex算法不仅能使动态范围得以压缩,图像的边缘也得到增强,达到了相互协调,同时还保持了原图像颜色的恒定性.此外,Retinex算法还克服了多种增强方法的综合应用,导致图像增强效果产生此消彼长的不足.
应用基于Retinex理论的增强方法处理图像的结果,如图3所示.由图3可知:图像的光照得到了补偿,增强后的图像视觉效果较好.利用算法中光照补偿方法,完成了原图像的反射图像的逼近.

图3 图像Retinex方法预处理结果Fig.3 Image Retinex method preprocessing results
2 基于增强图像的特征匹配
针对图像模糊引起图像质量较差的视觉效果,应用文中方法进行实验.以A 图像作为参考图像,其余的5副图像作为待匹配图像,如图4所示.由图4可以看出:图像的视觉效果从A 图像到F图像逐渐变得模糊.
将图4中的A 图像分别与B,C,D,E和F图像配成对,对应得到的实验结果,如表1~5所示.由表1~5可知:图像经直方图均衡化处理后,再进行图像的特征点提取和匹配时,得到图像正确的匹配点数明显比未处理前的图像有所增加,尤其是ASIFT 算法匹配的特征点变化相当明显;其次,SURF算法较SIFT 算法匹配的特征点数目变化更显著.经过同态滤波预处理的图像匹配的特征点数目,与未处理图像特征点匹配点数没有明显的变化.


图4 待匹配的模糊图像Fig.4 Fuzzy image

表1 模糊图像A 和B的特征点匹配表Tab.1 Feature points matching table of fuzzy image A and B
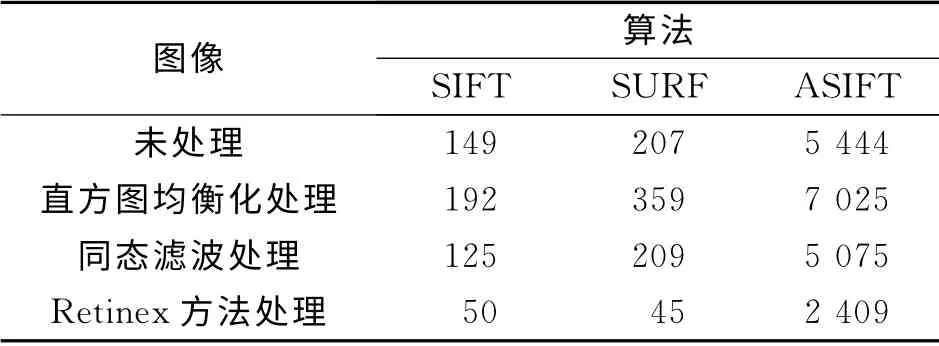
表2 模糊图像A 和C对的特征点匹配表Tab.2 Feature points matching table of fuzzy image A and C

表3 模糊图像A 和D 对的特征点匹配表Tab.3 Feature points matching table of fuzzy image A and D

表4 模糊图像A 和E对的特征点匹配表Tab.4 Feature points matching table of fuzzy image A and E

表5 模糊图像对A 和F特征点匹配表Tab.5 Feature points matching table of fuzzy image A and F
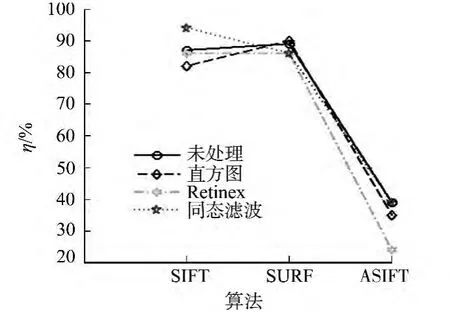
图5 模糊图像特征点的匹配率Fig.5 Matching rate of fuzzy image
模糊图像SIFT 算法、SURF 算法和ASIFT 算法的匹配率(η),如图5所示.由图5 可知:经直方图均衡化处理的图像,用SURF算法提取的图像特征点匹配率较高;同态滤波预处理图像的方法,经SIFT 算法提取图像特征点的匹配率较高.
3 结束语
详细研究3种图像增强的方法,并通过实验实现了3种方法的图像增强,提高了图像特征点匹配数目.经过实验分析,与未进行增强处理的图像相比,文中方法处理的图像特征点数目有较明显地提高,验证了文中提出的方法是有效的.
[1]HARRIS C,STEPHENS M.A combined corner and edge detector[C]∥Proceedings of the 4th Alvey Vision Conference.Manchester:Springer,1988:147-151.
[2]WANG Xin-jing,ZHANG Lei,LIU Ming,et al.Arista-image search to annotation on billions of web photos[C]∥IEEE Conference on Computer Vision and Pattern Recognition.San Francisco:IEEE Press,2010:2987-2994.
[3]HIRSCHMÜLLER H,SCHARSTEIN D.Evaluation of stereo matching costs on images with radiometric differences[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2009,31(9):1582-1599.
[4]CHENG Liang,GONG Jian-ya,LI Man-chun,et al.3Dbuilding model reconstruction from multi-view aerial imagery and lidar data[J].Photogramm Eng Remote Sens,2011,77(2):125-139.
[5]FREEMAN W,ADELSON E.The design and use of steerable filers[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1991,13(9):891-960.
[6]GOOL V L,MOONS T,UNGUREANU D.Affine/photometric invariants for planar intensity patterns[C]∥4th European Conference on Computer Vision.Cambridge:Springer,1996:642-651.
[7]SCHAFFALITZKY F,ZISSERMAN A.Multi-view matching for unordered image sets[C]∥7th European Conference on Computer Vision Copenhagen.Copenhagen:Springer,2002:414-431.
[8]BELONGIE S,MALIK J,PUZICHA J.Shape matching and object recognition using shape contexts[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2002,24(4):509-522.
[9]LOWE D G.Distinctive image features from scale-invariant key points[J].International Journal of Computer Vision,2004,60(2):91-110.
[10]BAY H,TUYTELAARS T,GOOL L.SURF:Speeded up robust features[J].Computer Vision and Image Understanding,2008,110(3):346-359.
[11]MOREL J,YU Guo-shen.ASIFT:A new framework for fully affine invariant image comparison[J].SIAM Journal on Imaging Sciences,2009,2(2):438-469.
[12]SZELISKI R.Computer vision:Algorithms and applications[M].北京:清华大学出版社,2012:94-112.
[13]GONZALEZ R C,WOOD R E.Digital image processing[M].3rd ed.北京:电子工业出版社,2011:55-80.
[14]梁琳,何卫平,雷蕾,等.光照不均图像增强方法综述[J].计算机应用研究,2010,27(5):1625-1628.