适于LED 路灯的车载式道路照明检测系统设计
2015-11-18秦大为
李 昊,秦大为
(1.常德市路灯维护管理处,湖南 常德 415000;2.盐城师范学院实验中心,江苏 盐城 224000)
0 引言
随着国内LED 技术的快速发展,LED 也在道路照明上得到了广泛的应用,用户对LED 路灯的检测要求也不仅仅满足于平均照度、平均亮度、照度均匀度等光度学指标的测量,同时更关心LED 路灯的色温和显色指数等色度学指标的测量。但是,目前,在国内的道路照明行业中,均采用传统的人工逐点测量方法,使用照度计和光谱仪来测量路灯照明系统的照度和色温等数据。此方法存在检测工作量大、检测时间长的缺点,而且对已通车的道路来说进行测量还存在交通安全隐患。为此文章在常规的道路照明测量方法基础上设计一种能同时实现光度学指标和色度学指标动态测量的车载式道路照明检测系统,以适应对LED 路灯的检测要求。
1 设计思想
由于传统道路照明的照度、亮度、色温、显色指数等参数测量都采用人工逐点方法,测量人员工作量大,对已通车的道路进行测量不安全,测量效率低,本方案采用车载式计算机自动检测系统,该系统由照度传感器、光谱分析模块传感器、系统主机、计算机组成。
传统的道路照明方法,人工记录数据量大,易出错误。本方案采用计算机记录、处理数据,包括历史数据的调看,历史资料的查找。
本系统将两只相距1 m 的照度传感器水平安装于汽车的引擎盖上,一只光谱传感器水平安装在车顶上(图1)。当汽车以一定的速度匀速行驶,其光度学、色度学等数据通过RS-232 接口传输到计算机中,通过计算机软件处理,立刻可得出路面的平均照度、照度均匀度、平均亮度、亮度均匀度、色温和显色指数等数据。
图1 中,1 为汽车,2 为相距1 m 的两只照度传感器,3 为光谱传感器。
图2 为道路照明检测系统的检测系统图。1 为照度传感器,2 为光谱传感器,3 为主机,4 为计算机。
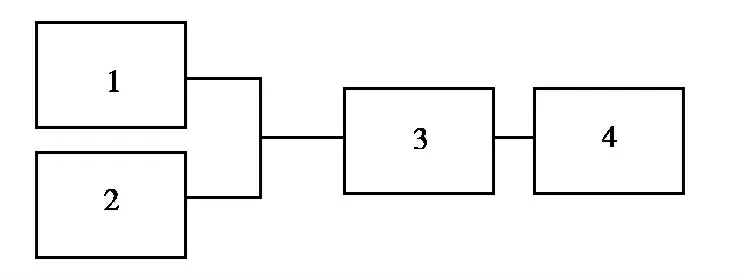
图2 道路照明检测系统的检测系统图
照度传感器1 为硒光电池传感器,固定在具有调平功能的磁性支架上。
光谱传感器2 的结构原理图如图3 所示。
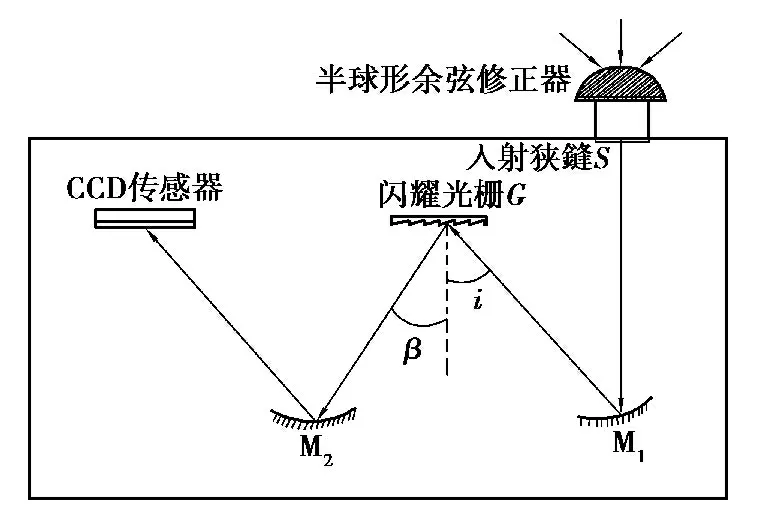
图3 光谱传感器检测原理结构图
图3 所示为光谱传感器检测原理结构图,根据实际需求,将其设计成动态检测仪器,其检测环境的照度较低,一般只有10~50 lx,且由于动态测量光源的入射角度在不断变化,传统光谱分析仪不能适应定期检测需要。因此,对光谱传感器的内部结构进行了光学结构优化设计,以满足检测需求。
亮度则根据照度×路面的反射系数获得。路面的反射系数近似由标准照度计和标准亮度计对选取路面的三个点来进行测量,取其平均值。
2 设计技术方案
2.1 硬件
本系统的主机部分采用单片机作为控制中心,控制A/D 转换和RS-232 通信。
系统的主机系统图如图4 所示。
图4 中,1 为两只照度传感器和一只光谱传感器,2 为运算放大模块,3 为A/D 转换模块,4 为单片机控制模块,5 为RS-232 通信模块。

图4 主机系统图
三只传感器采集外界的光信号将其转换为电信号,传输给运算放大模块,将信号放大到合适的范围,并传输至A/D 转换模块,将模拟信号转换为数字信号,然后将数据传输到单片机控制模块,最后传输到RS-232 通信模块,将数据传输到计算机。
此套系统是以单片机为核心,通过单片机来控制A/D 转换模块,提高了系统的可靠性,单片机采用了AT89S52 高性能单片机。
此外,为了提高产品的整体性和方便性,本系统还配备了高性能的笔记本电脑和GPS 定位系统,可以使测量人员随时了解测试车所处的位置。
2.2 软件
该系统软件是在VB 环境下自主开发的应用软件。软件可将两只照度传感器采集的照度值求平均值,并计算出当前测量的路面照度平均值和照度均匀度,亮度平均值和均匀度,光谱传感器获得路灯的色温和显色指数。软件还可以绘制出当前测量的路面适时照度和平均照度,适时亮度和平均亮度的曲线,方便、实用。单片机的部分C 语言程序如下:

此外,软件加上了数据库功能,可将每次测量的数据值保存在计算机中,方便随时调看,也可将一条道路多个车道的数据全部叠加,计算出总的平均照度、照度均匀度、平均亮度和亮度均匀度。
该软件还嵌合了GPS 卫星定位系统,可实现地图操作、查询、图层控制等功能,方便测量人员了解目前所处的位置。

图5
3 仪器主要设计技术参数
(1)照度的测量范围:2~200 lx;
(2)照度测量的精度:±5%;
(3)亮度测量范围:0.1~25 cd/m2;
(4)亮度测量的精度:±5%;
(5)照度、亮度均匀度测量范围:0~1;
(6)取样速度:10 次/秒;
(7)RS-232 传输速率:9 600 bps;
(8)汽车的行进速度:18~32 km/h;
(9)波长的测量范围:380~760 nm (可见光);
(10)波长准确度:±0.5nm;
(11)色品坐标准确度:±0.000 5;
(12)色温的测量范围:1 500 K~25 000 K,分辨率:1 K;
(13)显色指数的测量范围:0~100;
(14)杂散光:<0.3%;
(15)光度通道线性:±0.3%;
(16)光谱分析模块积分时间:10 ms~10 000 ms;
(17)计算机配置:联想邵阳E46L,CPU:T3500,内存:2 G;
(18)工作环境温度:-15~40 ℃;
(19)工作环境湿度:10%~70%RH;
(20)主机尺寸:370 (宽)mm × 173 (高)mm×360(深)mm。
4 小 结
CZXT-1 型车载式道路照明检测系统已经成功地应用于重庆、石家庄、无锡、常德、盐城等多家城市照明管理部门的道路照明测试。使用结果表明,系统设计合理、操作方便、快捷,大大减少了测量的时间,安全、准确、可靠。利用该系统也可对城市照明路灯现场的高压钠灯、金卤灯、无极灯、节能灯等各种路灯光源的平均照度、平均亮度、照度均匀度、色温、显色指数、光谱波长、色品坐标等近10 项路灯光源光度学、色度学方面的主要技术参数进行现场动态检测,为路灯光源光度学、色度学指标的现场动态测量提供了有效的技术设备支持。
[1]钱伟,秦大为,曹刚.车载式道路照明检测系统[J].灯与照明,2010(3)
[2]原永志.浅析道路照明常见的几个问题[J].城市照明,2009(1)
[3]郭志坚.城市道路照明设计浅谈[J].中国科技信息,2009(1)
