基于ANSYS的智能搬运AGV小车下车体结构分析
2015-11-15高建东项士江李亚锋
高建东,项士江,李亚锋
(1.沈阳工学院机械与运载学院,抚顺,113122;2.沈阳工学院机器人研究所,抚顺,113122)
0 引言
AGV是一种以电池为动力,装有电磁导引设备或光学导引设备,能够自动沿着预定轨道行驶三维自动化智能车辆,是一种在工控机控制下精准地行驶并准确停靠目标点的轮式机器人。AGV小车车体机械机构的好坏关系着AGV整车的性能。因此,AGV小车的车体结构设计是否合理、可靠是关键性因素。
传统的结构校核运用的是经典力学理论进行分析计算,其缺点:计算复杂、耗时较长;应用功能完善的分析软件,如ANSYS12.0对AGV下车体结构进行分析,将大大缩短分析时间,降低成本,完成对AGV下车体结构的校核任务,确保AGV小车下车体结构设计的科学性、合理性及可靠性,提高小车的研发效率。
1 有限元分析方法基本思想
有限元思想是一种将连续的求解域离散成为有限个单元组合,这些离散单元按照一定的排列方式互相联接在一起,来逼近原来连续的求解域,从而实现将一个连续的无限自由度问题简化为离散的有限自由度问题求解。
2 AGV下车体模型的分析过程
(1)创建分析模型
有限元分析模型的创建只要有三种方法:直接建模法、实体建模法及输入实体法。本文采用输入实体法将CAD系统中创建的AGV小车下车体模型直接导入ANSYS12.0中,考虑小车运行过程中最大应力值得部位只要集中在该部位,故取下车体为分析研究对象。
(2)定义单元类型
在分析过程中,依据分析对象特征定义适当的单元类型。单元类型主要由连续体单元、杆单元、梁单元、壳单元、刚体单元以及薄壁单元等。本小车下车体选择Solid45单元,该单元有3个自由度,分别为UX,UY,UZ。
(3)有限元模型网格划分
网格划分类型主要分为扫略网格、结构网格和自由网格三种。网格划分方法决定网格质量,进而决定分析精度。AGV下车体是承载应力最大区域,应划分较密的网格。
(4)定义材料属性
根据ANSYS软件分析流程,结合实际情况,对AGV小车下车体 进行静力分析。该小车下车体材料属性参数如表1所示。

表1 AGV小车下车体材料属性表Table 1 The material properties table of AGV lower body
(5)施加约束和载荷
该AGV小车搬运最大货物要求不超过500kg,AGV小车自身重量200kg,对该小车四轮进行全约束,考虑其受力特点,均匀施加载荷7000N。施加载荷受力如图4所示。
图1 下车体实物图Fig.1 The solid model of the blade root section
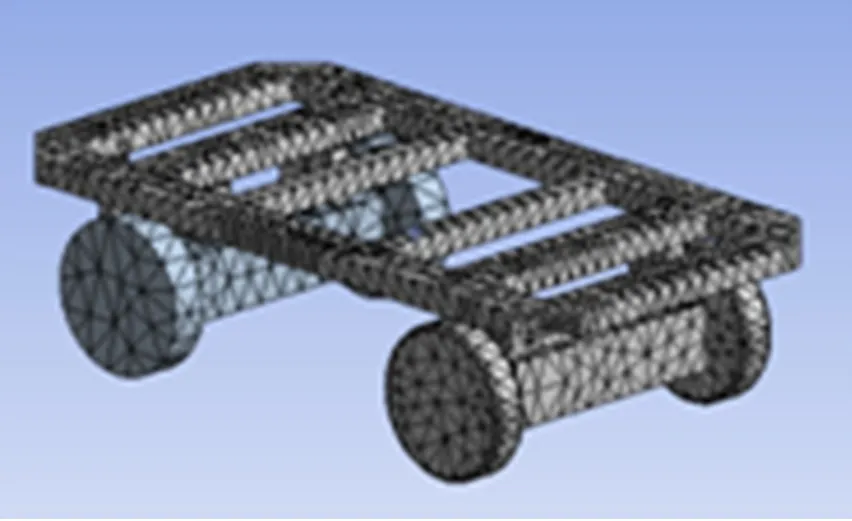
图2 下车体网格模型Fig.2 The mesh model of the body under load chat
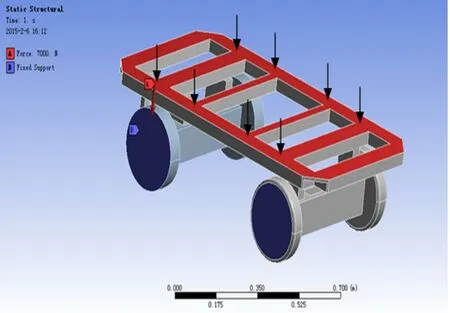
图3 下车体施加载荷图Fig.3 Applied to the body under load chart
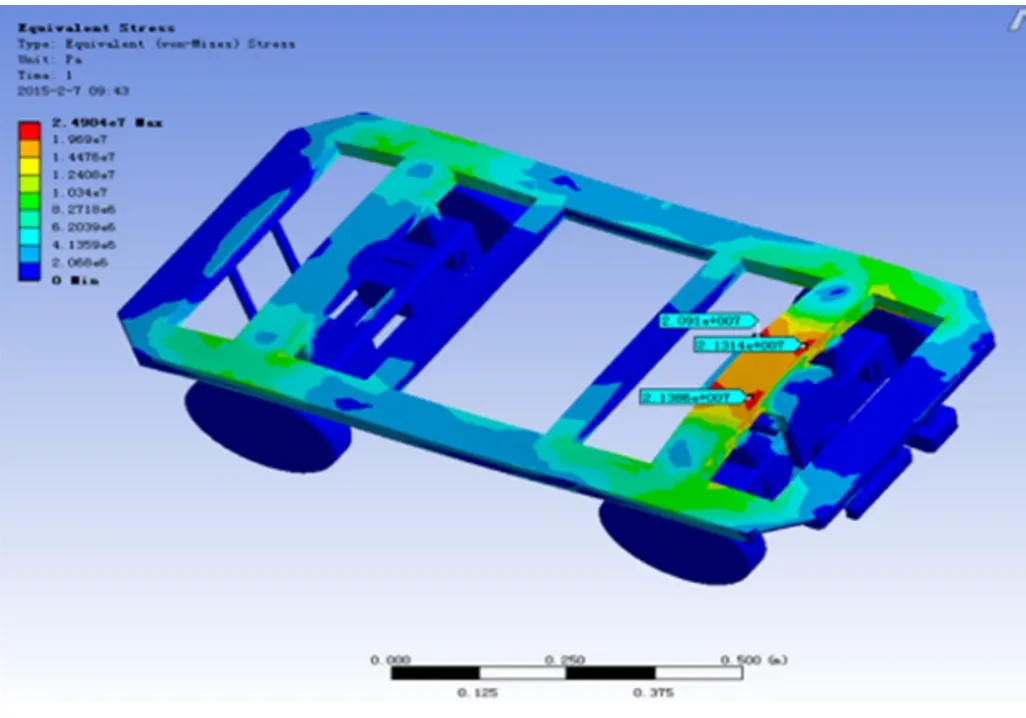
图4 等效应力分布图Fig.4 Equivalent sought
(6)结果分析
从AGV小车下车体的等效应力分布图可以非常明显地看出AGV小车下车体的应力集中在后轮支撑架位置,结合实际可知小车前部是控制箱,后部是载货台,载货台部位的后轮支撑架是所受应力最大的位置,最大值为213.86MPa,小于45号钢的许用应力值235MPa,因此该结构满足应力要求。
3 结语
AGV是智能搬运机器人的一种,AGV小车优越的性能与AGV小车车体机械结构密不可分。AGV小车车体机械结构设计的合理性、科学性、可靠性是小车整车性能优越性能够实现的重要前提保证。本文采用输入实体法建立了AGV小车下车体有限元分析模型,运用ANSYS 12.0软件对AGV小车下车体机械结构进行了静力学分析及应变分析,通过分析验证了AGV小车下车体机械结构满足结构设计要求。
[1]叶尚辉.建立有限元模型的一般方法[J].电子机械工程,1999(12)17-21
[2]王磊,周陶勇.基于ANSYS的几种建模方法探讨[J].现代机械,2006(3):51-52
[3]刘国庆,杨庆东.ANSYS工程应用教程[M].中国铁道出版社,2004(6):34-36
[4]周长城,胡仁喜,熊文波.ANSYS11.0基础与典型范例[M].电子工业出版2007(4):6-8
