基于STM32晾衣机器人的设计
2015-11-10郭中会孙春志
郭中会 孙春志

摘 要:基于STM32的智能晾衣机器人的设计是为了改善在物联网浪潮下晾衣工具仍处于比较原始的现状,该论文致力于设计出一个使用方便、多功能、服务型的智能产品。设计思路是通过雨滴传感器、湿度传感器等传感器感受环境变化量,将微小电压量放大后送往控制器STM32进行处理,由处理结果控制不同电机的转速和方向来实现智能自动控制,此设计有智能控制和无线WiFi控制两种,使用方便。
关键词:物联网;雨滴传感器;晾衣机器人;STM32
中图分类号:TP242 文献标识码:A 文章编号:2095-1302(2015)10-00-03
0 引 言
随着智能产品的发展和物联网的普及,智能家具得到迅速发展。当前国内外在晾衣产品上的研究主要面对两个方面:阳台晾衣杆的升降方式和落地衣架的牢固样式。这两个方面都是建立在机械上的研究,无法和现代物联网技术联系到一起。而目前生活中所使用的衣架多为不能随外界环境变化而自动做出相应应对方法的传统类型,晾衣工具还是处于比较原始的层次,已经跟不上生活节奏的变化[1]。本文采用STM32作为晾衣机器人的主控制器,各种传感器检测外界环境,通过控制电机的运转实现智能。另外,本设计采用无线设置,可以使用电脑、平板、手机等终端进行多种模式的控制。
1 整体设计方案
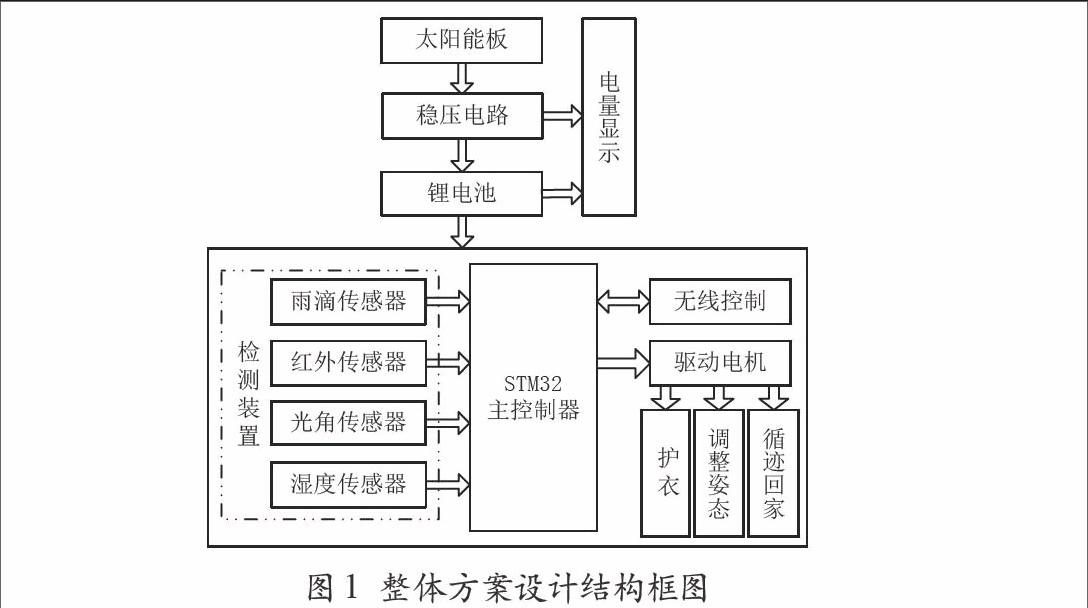
本设计供电采用太阳能板充电,使用DC/DC变换器的设计,可提供不同电压的输出;利用光夹角传感器对太阳的位置进行实时监测,使晾衣机器人始终和太阳光垂直,加速晾晒速度;利用多点雨滴传感器检测周围环境的湿度,控制防雨电机和避雨罩,对衣服进行防雨保护;并设置循迹回家和自动回收功能,利用色标和避障传感器对地面颜色和障碍物进行识别,回到预定目的地。通过对衣撑的设计利用湿度传感器对衣服湿度进行检测,衣服晒干后进行回收[2]。而所有的电路都内置于方形不锈钢管制成的机器人外框中。
整体设计结构框图如图1所示。
2 硬件电路详细设计
智能晾衣机器人的硬件部分主要由STM32微处理器、雨滴传感器、湿度传感器、色标循迹传感器、无线控制器、太阳能板、稳压电路、电量显示电路、电机驱动、直流减速电机和锂电池组等组成。
图1 整体方案设计结构框图
2.1 主控电路的设计
该晾衣机器人的主控采用ARM公司的ARM Cortex-M3为内核的STM32F103,最高工作频率为72 MHz,边上集成32-512 KB的FLASH存储器和6-64 KB的SRAM存储器,有两个12位的D/A转换器(16通道),A/D测量范围为0-3.6 V,具有双采样和保持能力。并且,最多有多达112个快速I/O端口、11个定时器和13个通信接口。其相对51单片机高端的配置是机器人产品主控的首选[3]。
最小系统电路原理图如图2所示。
2.2 雨滴传感器的设计
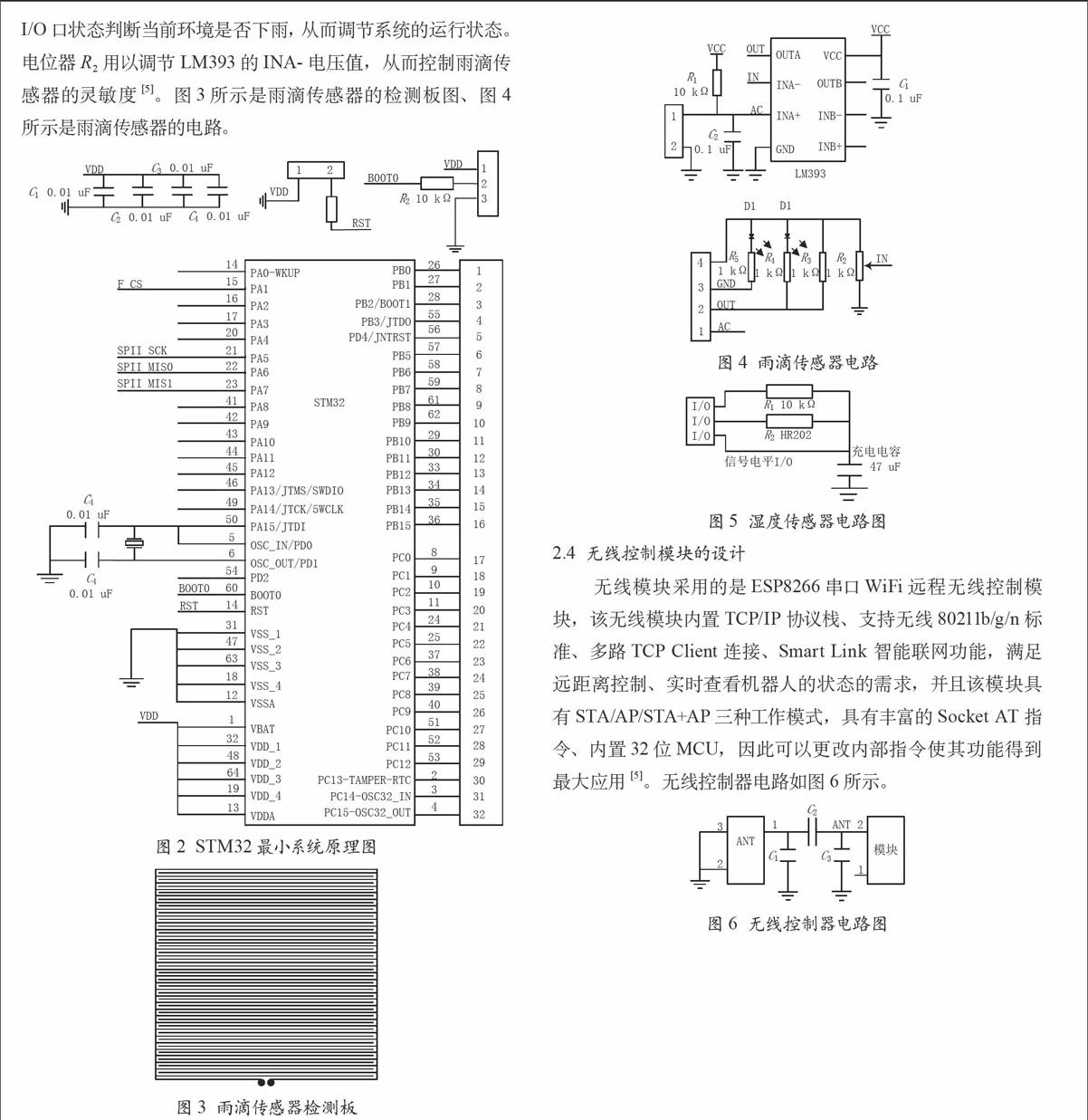
目前市场上雨滴传感器的检测部分使用的多为湿敏电阻等器件由有机高分子材料组成,价格昂贵[4]。本设计的检测部分是通过在单面覆铜板上雕刻出W与M型线条,其中一端口接地,另一端口接以LM393 为双电压比较器集成电路的调节电路。正常情况下,端口两端电压为VCC,即AC为VCC。当雨水滴到覆铜板上使W型线条和M型线条相接触, 两端口电压小于VCC。LM393通过比较INA-与INA+的电压差输出高电平或低电平。STM32即可根据与LM393输出端连接的I/O口状态判断当前环境是否下雨,从而调节系统的运行状态。电位器R2用以调节LM393的INA-电压值,从而控制雨滴传感器的灵敏度[5]。图3所示是雨滴传感器的检测板图、图4所示是雨滴传感器的电路。
图2 STM32最小系统原理图
图3 雨滴传感器检测板
2.3 湿度传感器的设计
本设计采用的湿度传感器是HR202L湿敏电阻,采用有机高分子材料,是一种新型湿度敏感元件,具有湿敏范围宽、长期使用性能稳定等优点,广泛应用于智能控制及科研领域。实现原理是利用微处理器的I/O口输出1 kHz的方波,通过HR202L湿敏电阻对电容进行充电,当检测I/O口发生由低电平反转为高电平时记下充电时间,经过微处理器运算处理即可得到当前的湿度值。
图5所示是湿度传感器的电路图。
图4 雨滴传感器电路
图5 湿度传感器电路图
2.4 无线控制模块的设计
无线模块采用的是ESP8266串口WiFi远程无线控制模块,该无线模块内置TCP/IP协议栈、支持无线80211b/g/n标准、多路TCP Client连接、Smart Link 智能联网功能,满足远距离控制、实时查看机器人的状态的需求,并且该模块具有STA/AP/STA+AP三种工作模式,具有丰富的Socket AT指令、内置32位MCU,因此可以更改内部指令使其功能得到最大应用[5]。无线控制器电路如图6所示。
图6 无线控制器电路图
2.5 稳压电路的设计
该稳压电路包括锂电池充电系统、锂电池保护系统、锂电池升压系统,采用上海如韵电子有限公司生产的CN3083管理芯片。当输入电压大于低电压检测阈值和电池端电压时,CN3083开始对锂电池充电,CH管脚输出低电平,红色LED亮,充电正在进行;当锂电池电压Kelvin检测输入端(FB)的电压低于3 V时,CN3083用小电流对锂电池进行预充电;当锂电池电压Kelvin检测输入端的电压低于3 V时,充电器采用恒流模式对电池充电,充电电流由Iset管脚和GND之间的电阻RISET确定;当锂电池电压Kelvin检测输入端(FB)的电压接近锂电池端调制电压时,充电电流逐渐减小,CN3083进入恒压充电模式;当输入电压大于4.45 V,并且充电电流减小到充电结束阈值时,CH端输出高阻态,OK端输出低电平,充电周期结束[6]。
锂电池升压系统采用上海如韵电子有限公司生产的CN5136PFM升压DC-DC转换器。具有最大输出电流能力达500 mA、片内高精度电压基准源、工作范围在2.7 V到6 V等优点,非常适合;锂电池供电的应用,采用该转换电路可以直接为电机驱动L298N提供电源[7]。稳压电路原理如图7所示。
图7 稳压电路原理图
2.6 电量显示电路的设计
该电路采用的是一款低功耗四通道电压监测芯片CN1185,其消耗电流只有7.3 mA,非常适合检测电池电压。芯片内部共包含四个电压比较器,每个比较器的正输入端接芯片内部电压基准源,用来对同一电压源进行分级监测。由于用户可以设置比较器的翻转阈值和迟滞,所以CN1185非常适合对电池电量进行监测,点亮显示电路原理如图8所示。
图8 电量显示电路原理图
3 软件设计
该设计软件由两部分组成:机器人的晾衣机器人程序设计和手机无线终端的设置。
3.1 晾衣机器人程序设计
机器人通电后无线设置其工作方式。工作方式包括四种:自动模式、回家模式、手动模式、晾衣模式。
(1)在自动模式中,机器人进入智能晾衣模式,自动调整与太阳的夹角、自动检测有无晾晒衣物并在衣物晾干后回到屋内、自动检测天气状况并在下雨时或有露水时将衣物封闭,而后回到室内;
(2)在回家模式中,机器人将会循迹到室外或室内,避免了人为繁琐的控制;
(3)在手动模式中,可以人为控制机器人的运行等状态;
(4)在晾衣模式中,机器人将不执行回家模式,在天气下雨或有露水时将衣物封闭并等待天气状况好转后继续晾晒衣物[8]。其运行流程如图9所示。
图9 程序流程图
3.2 手机无线终端的设置
手机无线终端采用AITEAD创易工作室开发的ITEAD STUDIO App,终端可以根据需要设置无线模块与手机通信内容和传输的信息,具有操作简单、使用方便等优点[9]。通过设置客户端IP与服务端IP的端口号可以实现远程连接,通过设置不同前、后、左、右功能需要发送数据与主控中相应功能程序判断条件一直对晾衣机器人的模式等进行选择和控制等。手机App控制示意图如图10所示。
图10 手机App控制示意图
4 结 语
本文提出了基于STM32的晾衣机器人的设计方法,并最终完成了实物的设计,此智能晾衣机器人既可以应用于普通农户室外晾晒衣物,也适合于小区楼房阳台上晾晒衣物。并且其所有电路均内嵌于机器人内部,密封性好,使用寿命长、美观大方,并且此设计功耗低、性价比高,有很强的市场竞争力和使用价值。
参考文献
[1] 张福学.机器人学:智能机器人传感技术[M].北京:电子工业出版社,1995.
[2] Gordon McComb.小型智能机器人制作全攻略(第4版) [M].臧海波,译.北京:人民邮电出版社,2013.
[3] 蔡自兴.机器人学基础(第2版)[M].北京:机械工业出版社,2015.
[4] 李华.MCS-51单片机实用接口技术[M].北京:北京航空航天大学出版社,2002.
[5] David Cook.机器人制作入门攻略[M].宫广骅,译.北京:人民邮电出版社,2013.
[6] 何立民.单片机应用技术选编[M].北京:北京航空航天大学出版社,2000.
[7] 喻金钱,喻斌.短距离无线通信详解—基于单片机控制[M].北京:北京航空航天大学出版社,2009.
[8] 温殿忠,赵晓锋.传感器原理及其应用[M].北京:科学出版社,2013.
[9] 陈隆昌.控制电机(第四版)[M].西安:西安电子科技大学出版社,2013.
