具有下肢训练功能的手推助力助行器设计
2015-11-07张雪雁徐少波侯迎迎
张雪雁,徐少波,侯迎迎
(华北理工大学 机械工程学院,河北 唐山063009)
具有下肢训练功能的手推助力助行器设计
张雪雁,徐少波,侯迎迎
(华北理工大学 机械工程学院,河北 唐山063009)
下肢训练;手推助力;助行器;双偏置曲柄滑块机构
长期下肢瘫痪或不便于行走的患者,常常会发生下肢肌肉萎缩的问题。本文设计了一部拥有辅助训练功能的手推助力助行器,采用双偏置曲柄滑块六杆步态机构驱动,使腿部被动运动,实现模拟正常人行走的步态,以防止肌肉萎缩,利于康复。基于Creo/Parametric优化设计模块对步态机构运动尺寸进行优化设计。采用有限元法对支撑框架结构进行强度和刚度校核。
随着社会老龄化日趋严重,助行器成了老年人的主要代步工具,并成为许多残障人士多年的伴侣。如果下肢长时间得不到运动,会导致肌肉萎缩,甚至并发其他疾病。为此,本文设计了一款可辅助下肢训练功能的手推助力助行器[1]。
1助行器结构设计
手推助理助行器由支撑结构、移动装置(动力源)、训练装置3部分组成,可当作轮椅使用,亦可训练恢复下肢肌肉力量。助行器总体结构示意图如图1(a)所示。支撑结构2采用通用座式轮椅框架结构。行走装置前部小轮为万向轮,后部大轮为驱动轮。
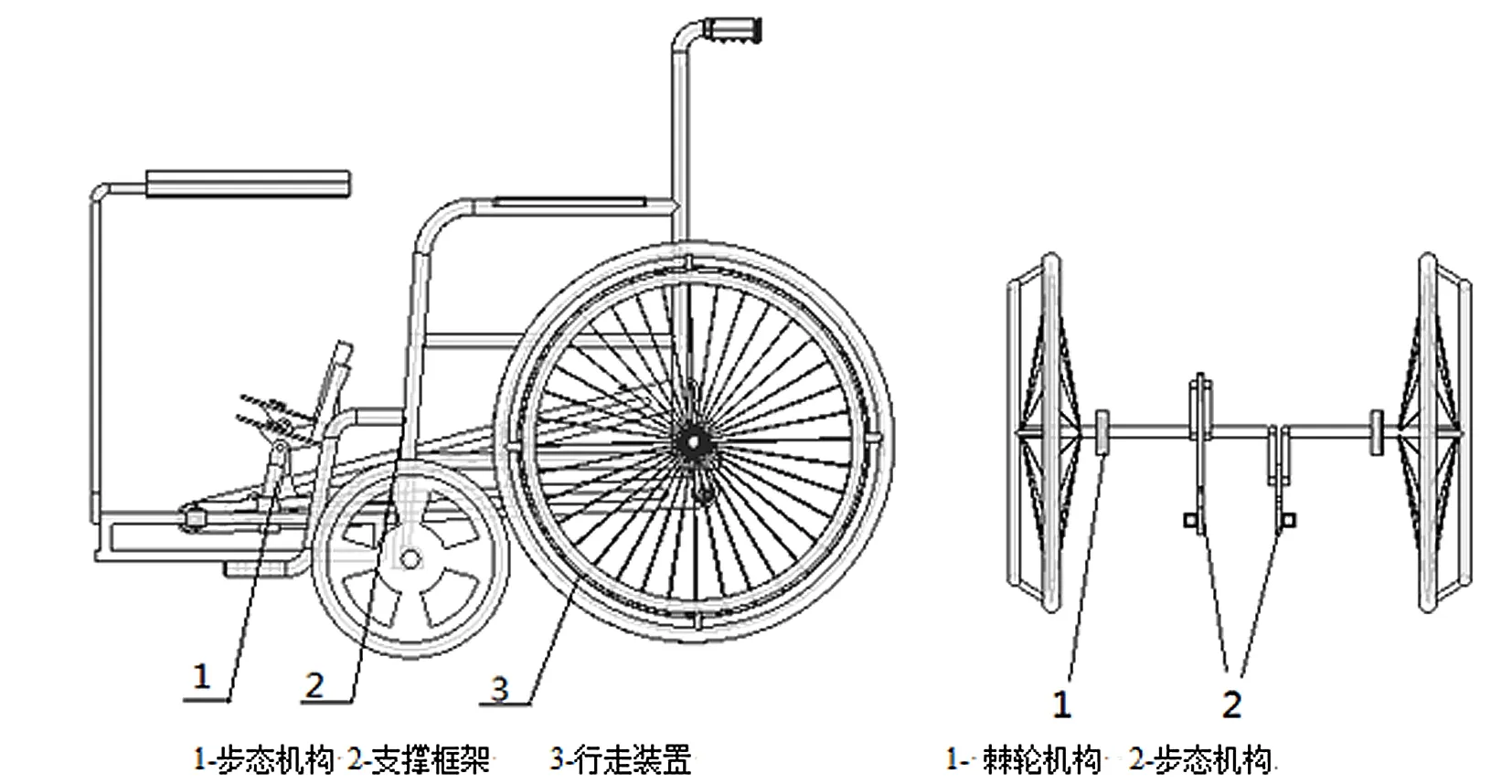
(a) 总体结构示意图 (b) 后轮轴结构示意图
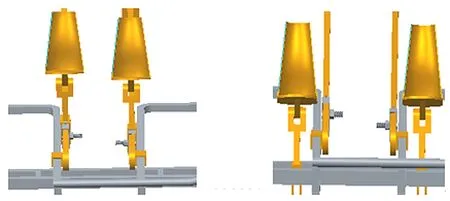
(a) 训练状态 (b) 代步状态
后轮轴如图1(b)所示,设有棘轮机构1,棘轮与一个后轮轴相连,棘爪与训练装置步态机构的曲柄轴相连,以避免轮椅后退时训练装置随着后轮一起反转,同时保证两后轮不共速,也便于轮椅的转弯。训练装置步态机构1采用踏板位置和曲柄长度可调的双偏置曲柄滑块机构,布置在座椅下方框架上。采用条形通孔与螺栓连接实现踏板位置和曲柄长度的调节。图2(a)和图2(b)为踏板处于训练状态和代步状态。踏板采用具有弹性的塑料材质,与支承杆间销钉连接,可模仿足部关节的运动。
2训练装置步态机构的优化设计[2]
训练装置的步态执行机构为偏置双曲柄滑块机构,其机构运动简图如图3所示。取双偏置曲柄滑块机构的曲柄长为l1=l3,连杆长为l2=l4,偏距为e,m为踏板在连杆上距活动铰链的距离。

图3 训练装置步态机构双偏置曲柄滑块机构运动简图
不同身高正常人足部步长和步高的统计数据如表1所示。

表1 不同身高正常人对应步长和步高的统计数据(mm)
根据结构要求确定单偏置曲柄滑块机构的优化设计变量为:X=[l1,l2,e,m]T。
以连杆上点M的坐标差与正常人步长和步高差最小为优化设计目标,建立目标函数为:
约束条件:四杆机构曲柄存在条件、助行器空间结构边界条件(ljieguoi)要求及四杆机构最小传动角限定条件。其表达式为:
基于三维软件Creo/Parametric优化设计模块进行优化设计[3-4]。创建曲柄滑块机构的骨架模型如图4所示,根据结构要求取连杆长为l1=1 m,偏距为e=0.15 m,为定值,设置参数曲柄长度和踏板距离m。对机构进行运动学分析。输入优化目标函数如图5所示。按公式(2)输入约束条件,进行优化设计。第一组身高优化结果和优化设计收敛图如图6所示。 按表1统计数据进行优化的结果有4组,如表2所示。该结果表明,通过调整曲柄长和踏板位置即可适应不同人群训练的需求。
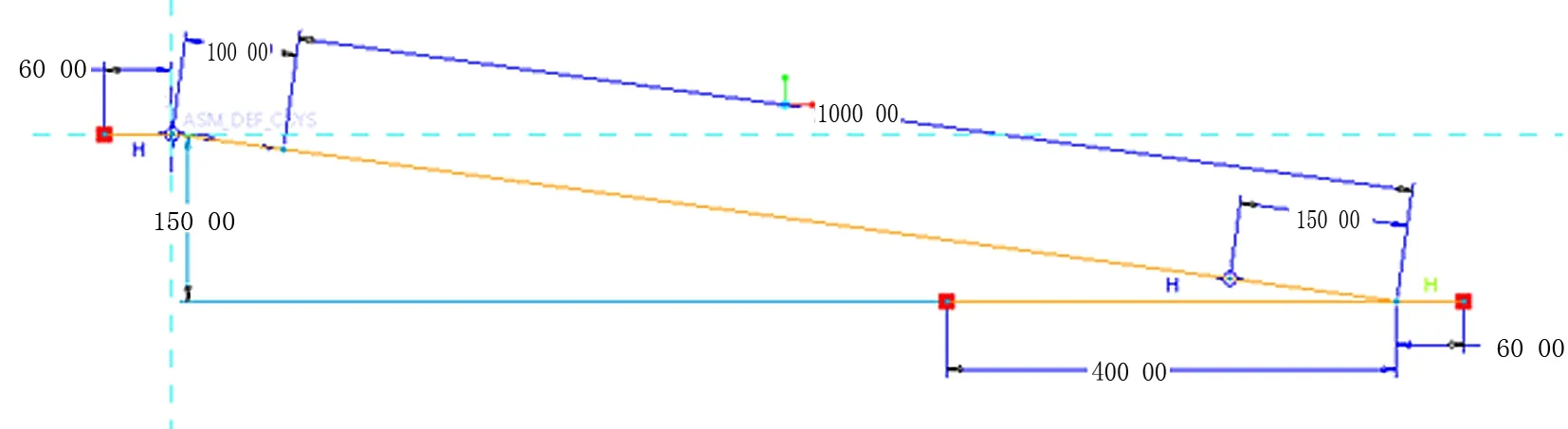
图4 曲柄滑块机构的骨架模型

图5 优化目标函数

图6 第1组身高优化结果和优化设计收敛图

身高曲柄长l1距离m身高曲柄长l1距离m1600~170074.32100.001750~1800123.78124.461700~175098.80120.371800~1850148.41123.57
3助行器运动分析及有限元分析
基于Creo软件建立助行器的三维装配图模型,如图7所示。
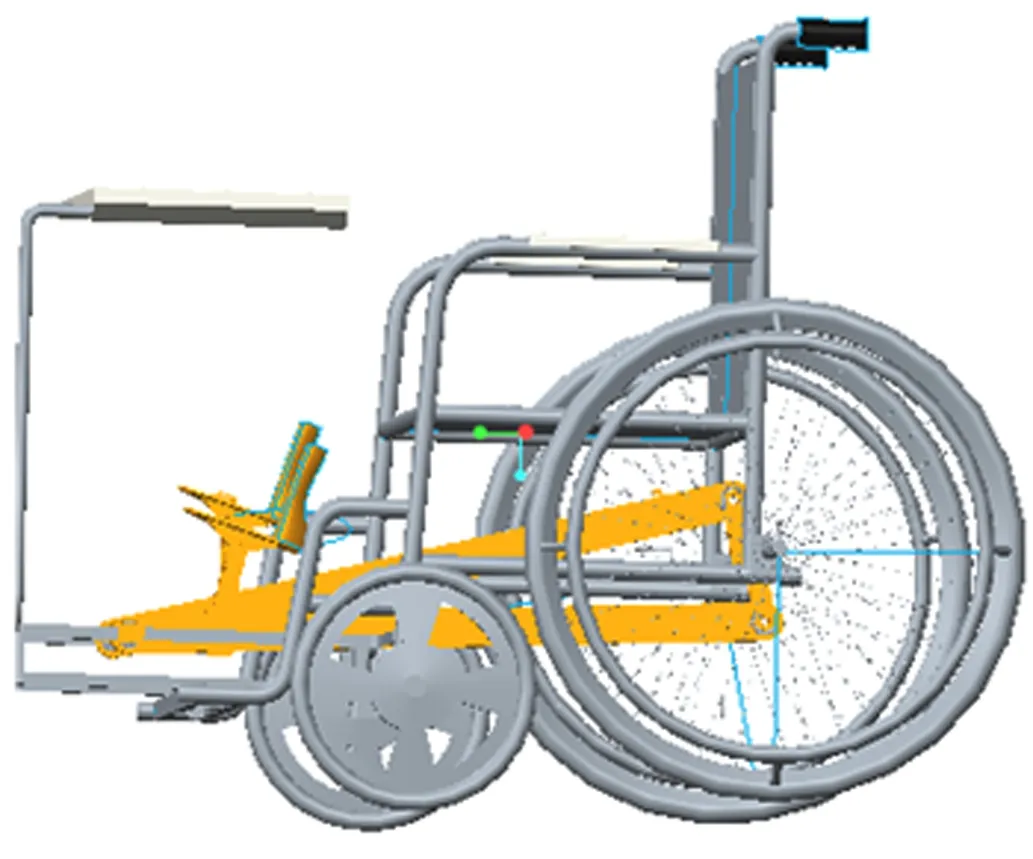
图7 助行器三维模型
根据三维装配模型对偏置式双曲柄滑块机构踏板在后轮转速为30 r/min时的运动进行分析,踏板上M点的模拟轨迹如图8所示,其速度加速度运动规律如图9所示。分析测量结果满足步长和步高的设计要求。计算机构最小传动角为74°,远大于设计要求。

图8 踏板上M点的轨迹模拟 图9 踏板上M点运动学分析结果
支撑框架为整体承力构件,选用管径为Φ30 mm, 壁厚为2 mm的5A05铝合金管材制作,在座椅中间节点处施加垂直力200 kg,设定后轮轴心位置处为轴承约束,固定位移,保留转动自由度,前端小轮轴心为固定约束,进行静力有限元分析,其等效应力如图10所示,应变云图如图11所示。

图10 支撑结构von Mises等效应力云图
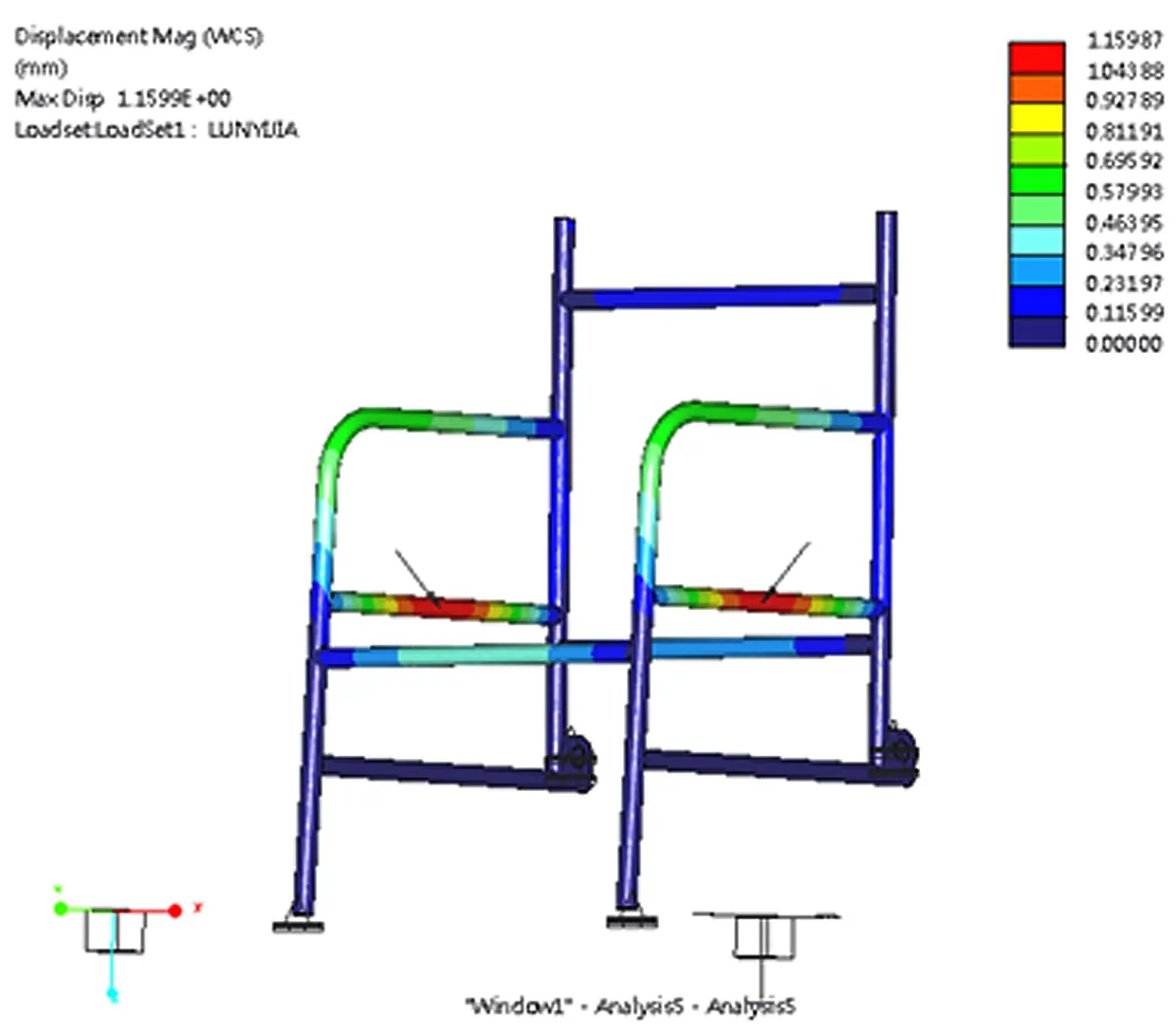
图11 支撑结构的变形云图
分析结果表明,支撑结构所受最大应力为97.957 5 MPa,而5A05管材的抗拉强度为225 MPa,满足强度要求。变形也在许可使用范围内,满足刚度设计要求。
4结论
该具有下肢辅助训练功能的助行器,采用曲柄长度和踏板位置可调的双曲柄滑块机构,采用优化设计方法对其进行尺寸设计,获得可适用于不同身高人群的4组解。采用有限元分析方法对框架结构进行强度、刚度分析,均满足设计要求。该助行器手动助力,使患者可在行进和沟通中锻炼受损的肌肉,既可适应市场的需求,也便于现有轮椅的改进。
[1]张秀峰,张晓玉.一种轻便普通轮椅的设计[J].中国医疗设备,2009,24(12):9-11.
[2]韩炬,冯华,黄家文.基于Creo/Parametric的包装机曲柄滑块机构的优化设计[J].包装工程2013,34(1):65-68.
[3]王孝平,龙伟,耿静华,陈毅.平面四杆机构的优化设计及运动仿真[J].机械工程师,2009(1):81-82.
[4]林水雄,余伟铬,刘峰.基于MATLAB及Pro/E对曲柄导杆滑块组合机构的仿真[J].机械设计与制造,2009,207(3):86-88.
Design of Manpowered Walking Aid with Function of Training Lower Limbs
ZHANG Xue-yan,XU Shao-bo,HOU Ying-ying
(College of Mechanical Engineering,North China University of Science and Technology,Tangshan Hebei 063009,China)
lower limb training;man-powered;walking aid;double offset type double crank slider mechanism
The person who was lower limb paralysis or inconvenient to walk, often troubled by muscle amyotrophy. The paper designs a manpowered walking aid with the function of training lower limbs, which help the foot moving with the double offset slider crank mechanism passive. The device is helpful of simulating the pace of normal person, avoiding the muscle amyotrophy, and is benefit to the rehabilitation. The paper design the lengths of bars of the double offset slider crank mechanism with the optimum design method, and check the strength and stiffness of the framework of the wheelchair with the finite element method.
2095-2716(2015)04-0034-06
TH789
A
