用于缸体缸盖清洗的机器人工艺轨迹规划*
2015-11-02王文康陶学恒王学俊芦金石曾振华何广维
王文康,陶学恒,王学俊,芦金石,曾振华,何广维
(1.大连工业大学机械工程与自动化学院,辽守大连 116034;2.大连现代辅机开发制造有限公司,辽守大连 116600)
用于缸体缸盖清洗的机器人工艺轨迹规划*
王文康1,陶学恒1,王学俊1,芦金石1,曾振华2,何广维2
(1.大连工业大学机械工程与自动化学院,辽守大连 116034;2.大连现代辅机开发制造有限公司,辽守大连 116600)
针对汽车发动机多型号缸体缸盖清洗的柔性化需要,研发了基于六自由度机器人技术的发动机缸体缸盖清洗工艺及装备。运用D-H方法,建立了六自由度发动机缸体缸盖清洗机器人的连杆坐标系,给出了结构参数表。对发动机缸体缸盖的整个清洗过程进行工艺分析,在Matlab环境下,利用Robotics Toolbox建立了机器人的三维仿真模型,对整个清洗过程进行关节空间轨迹规划,得到了整个清洗过程末端执行器的运动轨迹和各关节位置、速度、加速度曲线。
清洗机器人;缸体缸盖;关节空间;轨迹规划
0 引言
近几年,对于汽车尾气的排放问题,国际环保部门颁布了更高的排放标准,市场竞争也日益激烈,对汽车零部件质量的要求也越来越高。汽车产品可靠性及质量的一个重要指标是清洁度,人们对这个指标也越来越重视。在精加工过程中,汽车零部件表面上会有很多杂质,这些杂质直接影响零部件的准确定位,从而影响到尺寸精度;在装配过程中,发动机总成等部件都可能因为微小的切屑和少量的铸造型砂的影响而损坏,发动机的性能也可能变坏,寿命变短。因此,汽车制造业目前所面临的一个重要问题就是如何提高汽车零部件的清洁度[1]。由于汽车发动机缸体缸盖的型号不同,缸体缸盖的结构、尺寸等也不同,这就要求发动机缸体缸盖的清洗具有一定的柔性。
汽车发动机缸体缸盖清洗行业的特殊需求是柔性化和高清洁度。在保证柔性化和高清洁度的基础上,缩短清洗节拍,提高工作效率是工厂最为关心的问题。
现在国际上逐渐流行起来一种新的清洗技术——机器人清洗技术,是一种柔性化的清洗方式。工业机器人是该系统的核心,工作时机械手夹持工件,依次完成浪涌式涮洗、前端面和底面清洗、定点定位清洗、水刀去毛刺等工序,具有高可靠性、高精度的特点,并且减少了辅助部件的数量,达到了结构最简化和柔性化。目前,工厂对机器人的整个清洗动作进行调试都是采用现场人眼定位的方式,而没有专门针对这一工艺过程进行轨迹的规划,所以造成效率低,精度差等缺陷。
本文作者与大连现代辅机开发制造有限公司合作[2],自主研发了用于发动机缸体缸盖清洗的机器人,整个机器人清洗机的总体布局图如图1所示。本文以该清洗机器人为研究对象,对机器人抓取发动机缸体缸盖进行清洗这一工艺过程进行分析。运用D-H方法建立了发动机缸体缸盖清洗机器人的连杆坐标系,并给出了结构参数表;在Matlab Robotics Toolbox环境下进行轨迹规划和运动仿真。

图1 机器人清洗机总体布局图
1 发动机缸体缸盖清洗机器人的机构装置组成与分析
本文自主研发的发动机缸体缸盖清洗机器人有六个自由度,其被安装在清洗室中,腕部末端装着末端执行器即机械手(六自由度机器人建立的实体模型如图2所示)。

图2 发动机缸体缸盖清洗机器人实体模型
1.1 发动机缸体缸盖清洗机器人的结构组成
目前国际知名的机器人公司如英国马丁路德,西门子,德国KUKA等公司都在进行发动机清洗机器人的研究。国内有很多制造工业机器人的公司,但由于清洗室内潮湿,工作空间小等特殊条件限制,没有能够直接应用于这个领域的机器人,而且也没有专门针对这一行业所开发的清洗机器人。本文专门针对发动机缸体缸盖的清洗开发了用于发动机缸体缸盖清洗的机器人。
根据运动功能的要求,发动机缸体缸盖清洗机器人要有较大的工作空间及较高的刚度和承载能力。本文所研制的发动机缸体缸盖清洗机器人的手腕采用RBR型结构。为了保证缸体缸盖清洗后的清洁度和清洗时能够到达准确的位置,发动机缸体缸盖清洗机器人采用交流伺服电机作为驱动器。为了提高机器人的回转精度,减小结构尺寸,发动机缸体缸盖清洗机器人采用RV减速器作为驱动器[3-4]。由于机器人的三大关节(腰关节、肩关节、肘关节)处受到很大的轴向力、径向力和倾翻力矩,本机器人在这三大关节处加有单排四点接触球式回转支承。后四关节处结构图如图3所示。

图3 发动机缸体缸盖清洗机器人关节结构图
本文自主研发的发动机缸体缸盖清洗机器人最多可以抓取重量为210kg的发动机缸体或缸盖。清洗不同型号的发动机缸体和缸盖时只需要换上相对应的机械手即可,具有高柔性化的特点。
1.2 发动机缸体缸盖清洗机器人运动机构分析
根据清洗工艺要求,确定了发动机缸体缸盖清洗机器人的结构布局方案,该机器人的结构简图如图3所示。
由图4所示的发动机缸体缸盖清洗机器人的结构简图可知,该清洗机器人的本体结构由基座、腰部、大臂、小臂、以及手腕组成。相对应的各旋转关节分别为腰部回转S(θ1)、肩部回转L(θ2)、肘部回转U(θ3),手腕偏转R(θ4)、手腕俯仰B(θ5)和手腕翻滚T(θ6),并且手腕的三个旋转关节的轴线相交于一点,符合Pieper准则。

图4 发动机缸体缸盖清洗机器人结构简图
(1)连杆参数确定
根据D-H方法,每个连杆可以用4个参数来描述,其中2个参数描述连杆本身,剩余2个参数描述两个连杆之间的连接关系。对于旋转关节,θi为关节变量,另外3个参数为定值,称为连杆参数。关节变量和连杆参数可以描述任何机器人每个连杆之间的运动关系。表1列出了发动机缸体缸盖清洗机器人的各连杆参数。

表1 发动机缸体缸盖清洗机器人的连杆参数
表1中ai-1表示连杆i-1的长度;αi-1表示连杆转角;di称为偏距,是关节轴线i上两个公垂线之间的距离;θi称为扭角,是垂直于关节轴线i的平面内两个公垂线之间的夹角。
(2)连杆坐标系构建
在1955年,Denavit和Hartenberg提出了D-H参数法[5-7],这个方法是机器人运动学分析中最常用的方法。D-H参数法用齐次坐标来表示各个连杆在参考坐标系中的位置,用4×4的齐次变换矩阵表示相邻两连杆之间的关系,最终得到机器人手爪坐标系在参考坐标系中的位姿[8]。
使用D-H参数法中坐标系的建立方法,得到了机器人处于初始位置时各个连杆坐标系,如图5所示。

图5 发动机缸体缸盖清洗机器人各连杆坐标系
2 发动机缸体缸盖清洗机器人的轨迹规划
发动机缸体缸盖清洗机器人的轨迹规划分为两种:一种是在关节空间进行,另一种是在直角坐标空间中进行。在关节空间中进行轨迹规划,是用各关节变量规划轨迹,所以计算量很小,实时控制简单,而且不会发生机构奇异性[9],因此经常被使用。本文通过MatlabRobotics Toolbox在关节空间下对机器人进行轨迹规划[10-11]。
根据发动机缸体缸盖清洗工艺的要求,发动机缸体缸盖先后需要经过浪涌式拟人涮洗工位,前端面和底面清洗工位,定点定位清洗工位,高压去毛刺工位,定点吹干工位。由于各个清洗装置开口处都为上部,所以机器人在抓取发动机缸体缸盖进行清洗时,为了躲避障碍,机器人手爪必须先移动到清洗装置上部,然后向下深入清洗装置内部。清洗完成后,手爪也应该按原路撒出。
在RoboticsToolbox中构建机器人模型只需要输入连杆参数,由于连杆坐标系存在坐标系前置与后置两种两种情况,所以在输入连杆参数时,需要指定采用哪一种坐标系,‘Modified’表示坐标系前置,‘Standard’表示坐标系后置。
生成机器人三维模型的命令如下:
link([alpha A theta D sigma],convention);
其中alpha、A、theta、D为机器人的四个连杆参数,sigma描述关节运动副,当sigma的值为默认值0时,表示该关节运动副为转动副,当sigma的值为非零值时,表示该关节运动副为移动副。convention表示机器人连杆坐标系的设置方法,‘modified’表示坐标系前置,‘standard’表示坐标系后置。
利用Robotics Toolbox中的ikine函数可以用来求解机器人的运动学逆问题。ikine函数的调用格式为:
q=ikine(robot,T);
q=ikine(robot,T,q);
参数robot表示机器人,T为要反解的变换矩阵,q表示初始猜测值(默认值为0)。
在Robotics Toolbox中,可以实现在笛卡尔空间中进行轨迹规划、在关节空间中进行轨迹规划和变换插值,相对应的三个函数分别是ctraj、jtraj和trinterp。本文在关节空间中对机器人进行轨迹规划。
其中jtraj函数的调用格式:
[q qd qdd]=jtraj(q0,q1,T);
[q qd qdd]=jtraj(q0,q1,T,qd0,qd1);
参数q为从q0运动到q1的关节空间规划轨迹,qd和qdd为规划轨迹的速度和加速度,T为设定的时间向量,速度不为零可以用qd0和qd1来指定。该规划函数是采用七阶多项式插值在关节空间中进行轨迹规划。考虑到机器人手抓坐标系{7}距离手腕坐标系{6)有790mm,只有加入这段距离才能使工件在整个清洗过程中避开障碍,所以在机器人的手腕坐标系{6)的后面固连一个坐标系(7),手抓坐标系(7)与手腕坐标系{6)之间的距离为790mm。
参考前面所建立的连杆坐标系的参数构建机器人,机器人整个清洗过程的程序如下:

通过在MatlabRobotics Toolbox中构建机器人模型,可以得到如图6所示的三维仿真模型。

图6 发动机缸体缸盖清洗机器人的三维仿真图形
发动机缸体缸盖清洗机器人在抓取发动机缸体缸盖进行清洗的过程中,总共经历了5个工位过程。整个清洗过程流程为:工作时,机械手伸出清洗室,到达上料道上方,张开机械手,抓取工件,然后机械手夹紧工件,返回清洗室,机器人按照清洗工艺要求,依次完成浪涌式拟人涮洗,前端面和底面清洗,定点定位清洗,高压水刀去毛刺和定点定位吹干,最后机器人再将工件放到下料道上,然后返回机器人初始位置。
在Robotics Toolbox基础上编制了机器人末端运动轨迹的可视化程序,使我们可以清楚地看到整个清洗过程中末端执行器的运动轨迹。机器人手抓在整个清洗过程中的运动轨迹如图7所示,发动机清洗机器人在各个工位的运动位姿如图8所示。
利用ikine函数对机器人在各个清洗工位的位姿反解,得到对应的关节角;然后通过轨迹规划函数jtraj对每个工位之间的移动进行规划。机器人手爪夹持缸体缸盖从浪涌清洗工位上方运动到前端面和底面清洗工位上方的各关节的位置、速度及加速度曲线如图9~11所示。从图中可以看出,规划出的机械手的位移、速度和加速度曲线连续并且光滑,说明在整个清洗过程中机械手的运行比较平稳,整个机器人的结构不会产生较大的振动。
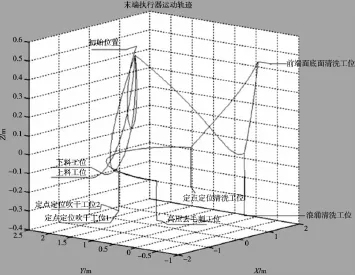
图7 发动机缸体缸盖清洗机器人末端执行器运动轨迹

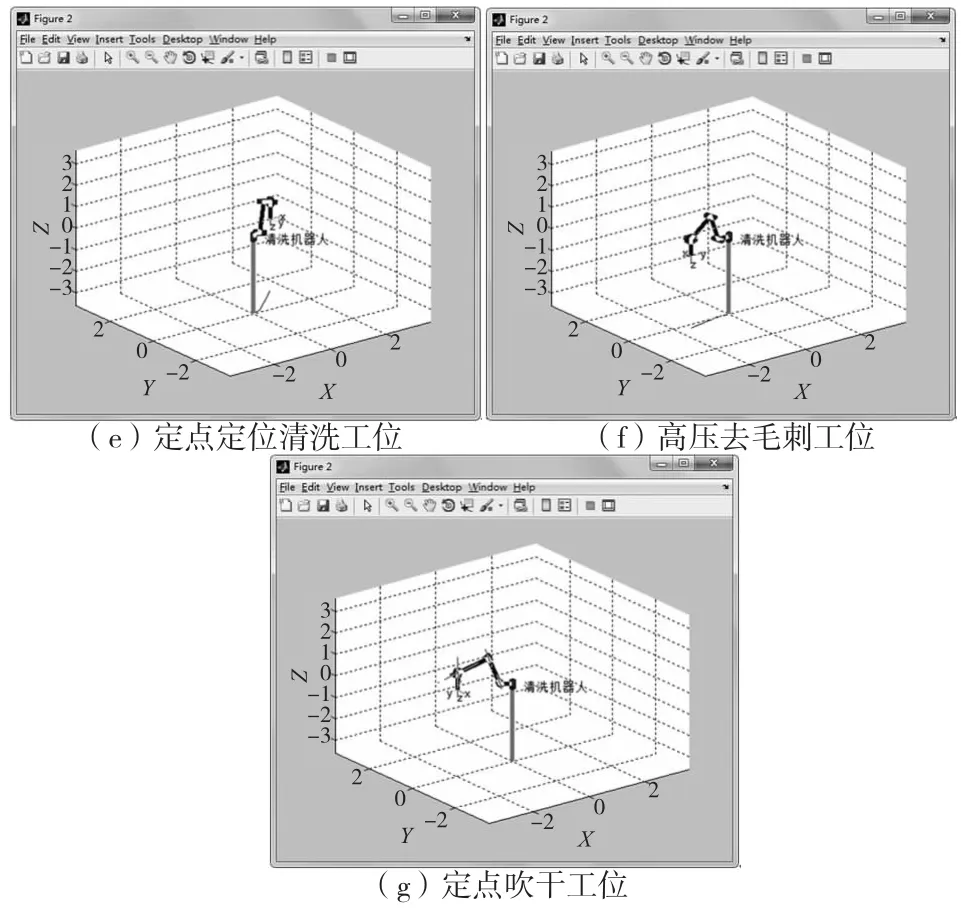
图8 发动机缸体缸盖清洗机器人各工位仿真图

图9 各关节角位移曲线
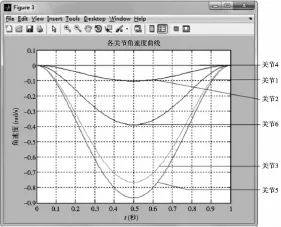
图10 各关节角速度曲线

图11 各关节角加速度曲线
3 结论
(1)运用D-H方法建立了发动机缸体缸盖清洗机器人的连杆坐标系,并给出了结构参数表,为推导机器人的运动学方程和在Robotics Toolbox进行轨迹规划提供了基础。
(2)在Matlab环境下,利用Robotics Toolbox建立了机器人的三维仿真模型,并对发动机缸体缸盖清洗机器人进行了轨迹规划,得到了整个清洗过程末端执行器的运动轨迹和各关节位置、速度、加速度曲线。从图中可以看出,在此工作过程中机械手的运动平稳,不会产生较大振动。
(3)通过对发动机缸体缸盖的整个清洗过程进行轨迹规划,将清洗节拍缩短到30s,与传统清洗方式相比,提高效率50%以上。
(4)发动机缸体缸盖清洗后的清洁度可以达到标准指标的要求,并能保证总体清洁度≤40mg。
[1]梅杰,宋毅,肖春玲,等.机器人在发动机缸体清洗中的应用[J].制造技术与机床,2009(12):34-37.
[2]王海洋.发动机缸体缸盖在生产线上的新型清洗系统[J].知识经济,2013(7):100.
[3]费仁元,张慧慧.机器人机械设计和分析[M].北京:工业大学出版社,1998.
[4]马香峰.工业机器人的操作机设计[M].北京:冶金工业出版社,1996.
[5]熊有伦.机器人技术基础[M].武汉:华中理工大学出版社,1996.
[6]孙增圻.机器人系统仿真及应用[J].系统仿真学报,1995,7(3):23-29.
[7]蔡自兴.机器人学[M].北京:清华大学出版社,2000.
[8]Denavit J,Hartenberg R S.A Kinematic Notation for Lowerpair Mechanisms Based onMatrices[J].Journal of Applied Mechnics,1995,21(5):215-221.
[9]Bunkie S.Introduction to robotics analysis,systems,applications[M].Beijing:Publishing House of Electronics Industry,2004.
[10]孙祥,徐流美,吴清.MATLAB 7.0基础教程[M].北京:清华大学出版社,2005.
[11]谢斌,蔡自兴.基于Matlab Robotics Toolbox的机器人学仿真实验教学[J].计算机教育,2010,19(10):140-143.
(编辑 李秀敏)
Process and Trajectory Planning of Robot for Cleaning the Cylinder Head
WANG Wen-kang1,TAO Xue-heng1,WANG Xue-jun1,LU Jin-shi1,ZENG Zhen-hua2,HE Guang-wei2
(1.School of Mechanical Engineering and Automation,Dalian Polytechnic University,Dalian Liaoning 116034,China;2.Dalian Modern Auxiliary Machinery Manufacturing Co.Ltd.,Dalian Liaoning 116600,China)
For the flexible needs of multi-modelautomotive engine cylinder and head cleaning,Developed based on six degrees of freedom robotic technology’s engine cylinder and head cleaning processes and equipment.UsingD-H method to establishes six degrees of freedom cylinder and head cleaning robot’s link coordinate system,and gives the structural parameters of the table.Analyzing the entire cleaning process of the engine cylinder and head,in the Matlab environment,using Robotics Toolbox to establish a three-dimensional simulation model of the robot,Planning the entire cleaning process trajectory in joint space,Obtains the entire cleaning trajectory of the end and the joint position,velocity,acceleration curve.
cleaning robot;cylinder head;joint space;trajectory planning
TH162;TG155.4+1
A
1001-2265(2015)03-0124-05 DOI:10.13462/j.cnki.mmtamt.2015.03.034
2014-07-23;
2014-08-22
大连市2012年工业循环经济发展专项(201209):基于机器人的高效智能清洗系统产业化项目
王文康(1991—),男,河北邯郸人,大连工业大学硕士研究生,研究方向为机械设计与制造,机电一体化应用技术,(E-mail)363085803 @qq.com;通讯作者:陶学恒(1963—),男,北京人,大连工业大学教授,博士,从事轻工机械设计与制造、机电一体化应用技术的研究,(E-mail)xhtao@dlpu.edu.cn。
