具有越埂功能水田秧苗运输机设计
2015-11-02改造者李佳航苑孟吉宋彦峰姚利军张金波
改造者:李佳航 苑孟吉 宋彦峰 姚利军 张金波
具有越埂功能水田秧苗运输机设计
改造者:李佳航 苑孟吉 宋彦峰 姚利军 张金波
目前,水稻秧苗从育苗基地到稻田的运输仍大多采用人工挑运的方式,不仅劳动强度大,且工作效率低,不适应当前机械化快速插秧的发展需要。本研究针对这一技术难题设计了一款具有越埂功能的水田秧苗运输机。该机可以一次运载40盘秧苗,在水田中的前进速度为3~5km/ h,且可在保证不破坏田埂的情况下快速、平稳的越过田埂。该机型的研制不仅解决了水田秧苗运输问题,而且解放了劳动力,提高了插秧机的作业效率,对于水田作业全面机械化的生产模式具有很好的推动作用。
东北三省是我国重要的粮食产区,素有“中国粮仓”的美誉,每年的粮食产量占全国粮食总产量的18%左右。在所有粮食作物中,水稻的种植面积及产量均在逐年增加。然而,在水稻的种植过程中,机械化水平低,秧苗的输送依然普遍采用较为原始的人工方式,不仅劳动强度大,而且大大降低了插秧的效率。目前,国内一些农机企业开发了几种秧苗运输车,而部分机型仍然存在一些问题,如由于机身过重而对田埂有较大的破坏作用;载苗量少致使插秧效率低;造价较高,不适应当前的生产需要等一系列问题。本研究利用液压控制系统实现了整机快速越埂功能,且秧苗运输量大,运输速度快,不仅提高了水稻插秧机的工作效率,而且解放了繁重的体力劳动。在实现了秧苗机械化运输的同时又节约了生产成本,对于推动水田作业全面机械化具有重要的实际意义。
总机结构及工作原理
本研究设计的水稻秧苗运输机是在手扶式两轮驱动插秧机的基础上改装而成。其主要结构包括:动力系统为一台小型汽油发动机、行走系统(行走动力轮、承重托板)、液压升降系统(可实现越埂功能)、变速箱、机架、秧苗承载架以及操控装置组成。
本机以手扶式两轮插秧机为平台,利用液压系统控制行走轮,使机架垂直升降一定高度进而实现整机的越埂功能。整机后部利用两个宽大的托板支撑机架及秧苗摆放架,在田间可以利用浮力减小行走轮的下陷量,从而减小了机械的动力输出,降低了能耗,提高了工作效率。汽油机在为行走轮提供动力的同时可在越埂时驱动液压泵工作。在秧苗运输过程中,控制液压系统调整行走轮的位置,保持整机平衡。当遇到田埂时,利用液压操控系统控制液压缸使行走轮提高一定高度(视田埂高度控制升降高度),从而在不破坏田埂的情况下越过田埂,越过田埂后手动控制机架下降至原位继续行走。整个过程操控人员只需控制液压系统及机车前进方向即可完成快速的秧苗运输。本机可一次运输秧苗40盘,可以同时为2台四行插秧机插秧作业输送所需秧苗。
越埂机构设计
水田田埂高度一般为250mm~300mm,宽度为200mm,故本机越埂机构中采用液压缸升降原理来实现,如图2所示。可以把液压缸的行程设定为100mm~300mm,并保证托板位置处于田埂的上方,不产生碰撞,保证越埂的平稳性。考虑到整机越埂时的方便、快捷要求,托板前端翘起部分采用与水平面呈30°角的斜面设计,并与后部的水平托板圆滑连接,这样可以保证方便越埂。托板通过立柱与机体铰接,以保证机械行走过程中的平稳性,同时可以保持重心垂直于地面,不会因载重的影响产生偏移。越埂时应根据载重情况适当控制前进速度,当载重量达到设计上限时,越埂速度不得超过0.2m/s。液压缸一端与机体铰接,一端通过支撑臂与行走机构相连接,通过控制液压缸的伸缩可以是实现整机的越埂功能。
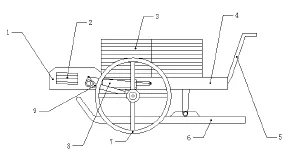
图1 秧苗运输机总机结构示意图
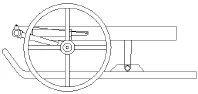
图2 越埂机构示意图

图3 载苗机构示意图
载苗机构设计
一般稻苗秧盘的尺寸为:长60cm,宽29.5cm,高3.7cm,插秧时秧苗高为10~25cm。本研究根据上述的秧盘尺寸确定载描机构为长121cm,宽60cm,高45.5cm的长方体框架(图3),并采用薄角钢钢板焊接而成,同时保证最大载重量时的强度和刚度要求。载苗框架用角钢分隔为上下10层并用钢网铺衬,每层可承载4个秧盘,从左右两端可将秧盘放入到载苗架中。载苗框架通过螺栓固定在运苗机的机架上。
结语
本研究利用液压控制系统实现了稻田秧苗运输机的越埂功能,可保证在载运40盘秧苗的条件下顺利通过田埂,将秧苗平稳快速输运给插秧机。本机轻便、灵活,适于中小规模的水田秧苗输送,工作效率高,油耗低。本机的推广应用对于实现水稻全面机械化作业具有重要的现实意义。
10.3969/j.issn.1001-8972.2015.17.030