嫦娥三号测月雷达第一通道数据处理与分析
2015-11-02高云泽董泽华方广有纪奕才
高云泽 董泽华 方广有 纪奕才 周 斌
①(中国科学院电子学研究所 北京 100190)
②(中国科学院大学 北京 100049)
嫦娥三号测月雷达第一通道数据处理与分析
高云泽①②董泽华①②方广有*①纪奕才①周斌①
①(中国科学院电子学研究所北京100190)
②(中国科学院大学北京100049)
测月雷达是嫦娥三号月球巡视器搭载的重要科学载荷之一,用以实现月表之下100 m之内的穿透成像。该文介绍了测月雷达的系统组成与工作原理,对获取到的月球科学数据进行了详细分析。在此基础上研究了有针对性的数据处理方法,并给出第1通道数据的初步处理结果。从处理结果中可知,测月雷达有效信号深度达到100 m以上,在大约40 m深处有雷达反射异常,初步分析为嫦娥三号着陆区月表之下两套地层的分界线。
嫦娥三号;测月雷达;数据处理;地质分层
1 引言
嫦娥三号(CE-3)月球巡视探测器于2013年12月2日成功登陆月球,这是中国第1个着陆月球的探测器,也是人类第1次在月球表面使用超宽带月球探测雷达(测月雷达)进行月球探测。测月雷达是基于CE-3月球巡视器(月球车)平台的高分辨率月球表面穿透成像雷达,是实现嫦娥三号项目科学目标的最重要的载荷之一。CE-3测月雷达研制任务由中国科学院电子学研究所承担,其科学目标是完成巡视路线上月球次表层结构探测[1]。
自从1972年阿波罗17号探测月球以来,相继有日本的“月亮女神”和印度的“月船一号”等雷达对月球进行科学探测。由于这些探测器都是基于轨道飞行器的,并且工作带宽较窄,所以分辨率很低,从几十米到几百米,无法满足探测月壤和月球次表层内部结构的需求[2-4]。而CE-3测月雷达采用高频超宽带工作体制,设计了两个独立的探测通道,兼顾探测深度和分辨率的要求,两个通道的设计探测深度分别为100 m和30 m,设计分辨率分别为1 m和0.3 m[5]。
CE-3着陆区位于虹湾区域南端,文献[6-8]的研究认为该区域南端比北端地质年代要晚,即存在两套地层单位的分界线,深度在70 m以内,正好处于测月雷达第1通道的有效探测范围之内[6-8]。如果能通过测月雷达数据将该地质层位分析出来,对于研究月球演化历史有重要意义[9,10]。
测月雷达回波信号中存在很多干扰,如月球车和其他载荷的干扰、月球表面物体的回波干扰等,这使得从原始信号中很难识别出有效目标,必须研究有效的信号处理方法对其进行处理[11]。在月球车停止工作之前,各科学载荷还处于效果测试阶段,测月雷达参数也在不断调整,其中增益参数的变化导致整个雷达剖面因信号强弱不同而严重不连续。月球车工作过程中经常停下来规划行走路线,此时获取到的探测数据为固定点的重复数据,这些数据会造成雷达图像在方位向上不连续。由于体积、重量和功耗的严格限制,CE-3测月雷达采用了特殊的采样原理,即1 bit比较量化和幅度反比增益,以较低的采样位数获得了很大的动态范围,有利于提高探测深度,但也有不利的一面,即信号幅度不能真实反映雷达回波的强弱关系进而影响成像效果。针对上述测月雷达数据特点和存在的问题,我们提出了有针对性的信号处理方法,首次获得了第1通道100 m以内的清晰成像结果,验证了CE-3着陆区月表之下的一条地质分层界面。
2 测月雷达系统原理
测月雷达是一种时域无载频脉冲雷达,由发射机、接收机、天线组成,包括两个通道,第1通道中心频率为50 MHz,第2通道中心频率为500 MHz,两个通道的接收机采样率分别为400 MHz和3.2 GHz。第1通道天线位于月球车前端,由两根上翘的细杆组成;第2通道位于月球车底部,距离地面约0.3 m,如图1所示。两个通道既可以同时工作,也可以独立工作[12]。

图1 嫦娥三号月球车Fig. 1 CE-3 rover
测月雷达发射机产生超宽带的无载频毫微秒脉冲,经过发射天线向月面下辐射超宽带电磁脉冲信号,信号在月壤和月壳岩石介质的传播过程中,若遇到不均匀层、不同介质交界面和漂石等目标,将产生电磁波信号的反射和散射。测月雷达接收天线接收到该反射和散射信号后,经过接收机采样获得相应的探测数据,通过对探测数据进行分析、处理和成像,得到巡视器行走区域内月壤厚度及其分布以及月壳次表层岩石地质结构等信息。
由于体积、重量和功耗等的限制,测月雷达采用了一种特殊的数据接收方法,对脉冲回波信号进行1 bit实时采样并进行多次累积,实现脉冲回波信号的等效接收和数字化。回波信号经过比较器后输出信号流,采样器对该信号流进行采样接收[13]。在一个脉冲重复周期里,采样器输出的第n个采样样本可按式(1)计算。

其中,为第n次比较的参考电压,经过256次比较后,第m个采样点的等效量化结果如式(2)所示,整个采样过程如图2所示。

图2 测月雷达采样原理Fig. 2 Sampling principle of LPR
测月雷达采用幅度-增益函数来实现可变增益,即增益随参考比较电压的变化而变化,使得弱信号获得的增益大,强信号获得的增益小,如图3所示。
3 测月雷达数据分析
月球车以距离着陆点4.4 m的N101点为起点,按规划好的导航点行进,每个导航点重新开机工作,到月球车最终停止的位置N209点,一共有17个导航点,路线总长度为114.8 m,如图4所示。
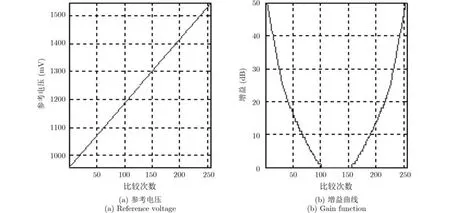
图3 参考电压及增益曲线Fig. 3 Reference voltage and gain function
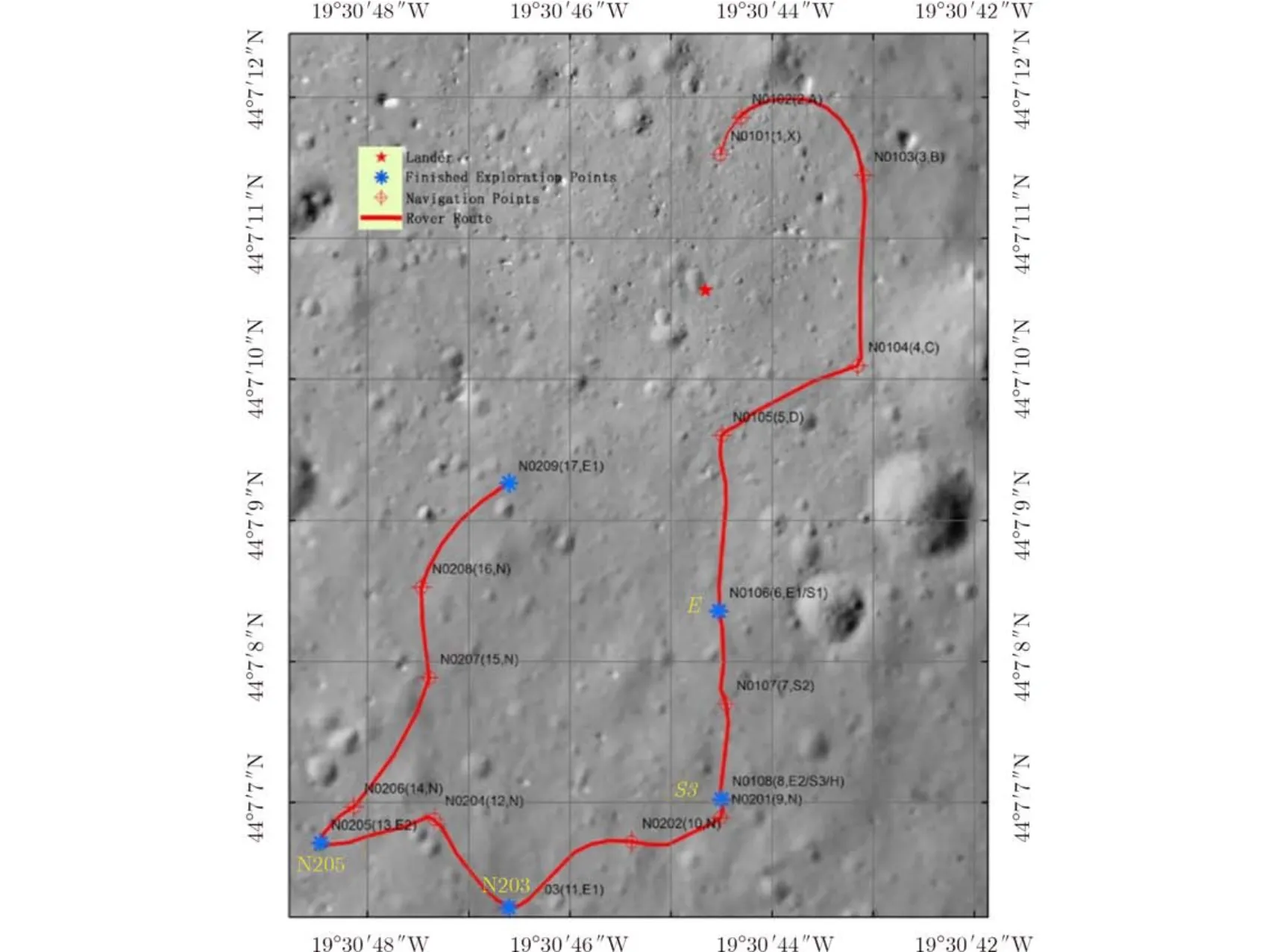
图4 月球车行进路线Fig. 4 The roadmap of CE-3 rover
测月雷达数据是按道存储的,每道数据由道头和科学数据组成,道头保存测月雷达参数信息,科学数据按一定时窗保存雷达回波幅度。第1通道时窗为10240 ns,科学数据长度为4096点;第2通道由A,B两路组成,每一路时窗为640 ns,科学数据长度为2048点[14]。
从起点N101到月球车最终停止移动点N209,第1通道共获得10173道数据,月球车移动过程中采集的有效数据为2021道,有8152道数据为月球车静止状态下采集的数据,数据处理时必须去除掉。为了测试不同参数的探测效果,从N101到N106,测月雷达的参数一直处于调整之中,其中增益模式和增益值对测月雷达图像影响最大,决定着接收能量的大小,调整过程中的增益参数如表1所示。
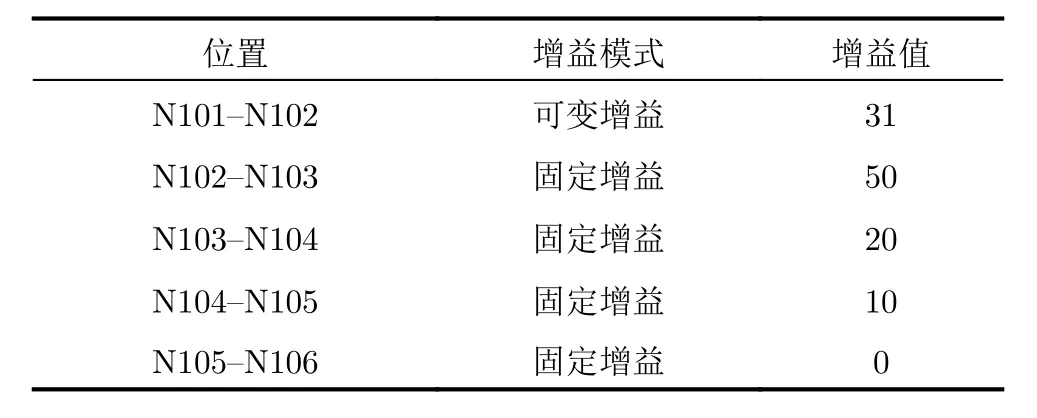
表1 第1通道不同位置的增益参数Tab. 1 Gain parameters of different position
增益参数不同会造成雷达图像明显的不连续,影响图像判读的准确性,数据处理时必须把增益还原到同样的水平上。图5所示为N101-N106原始数据连接后的结果,可以看出每一段数据之间存在明显的不连续。
4 测月雷达数据处理
根据测月雷达的采样原理以及实际工作中的数据获取过程,必须采取一系列相应的数据处理方法,如抽取有效数据、增益还原和饱和信号处理等,才能取得较好的成像结果。
4.1抽取有效数据
月球车行进过程中,为了规划下一步行进路线会暂时停在原地不动,此时获得的数据为静止的重复数据。在数据处理时必须将静止数据去除掉,否则会造成雷达剖面的不连续,影响对地下目标的识别。测月雷达在科学数据道头中保存了每一道数据产生时的位置信息,位于道头的第15至26 Byte,包括3个方向的坐标,各4个Byte。因此,可以利用坐标信息来判断测月雷达处于静止或移动状态。如果相邻道数据的坐标完全相同,则只保留其中的一道数据,其余道数据删除,剩下的即为移动过程中产生的有效数据。图6为N201-N202段数据删除静止数据前后的对比,图6(a)为删除前数据结果,红色圆点标示的为静止数据,图6(b)为抽取的有效数据,可以看出抽取处理后雷达图像连续性增强。
4.2直流去除
由于接收机饱和恢复过程中的低频振荡,数据中存在一个频率接近直流的低频分量,在做后续的增益还原处理之前必须将其去除掉,否则将使信号不能还原到真实的幅度大小。直流分量频带范围非常窄,使用通常的滤波方法容易引起时窗边缘信号抖动。因此,我们采取了一种沿时间方向的时域滑动滤波方法。该方法首先在一道数据中沿时间方向以一个窗口对数据取均值,然后该窗口中心点的数据减去此均值,逐点滑动窗口完成对一道内所有数据的处理,具体如式(3)所示:

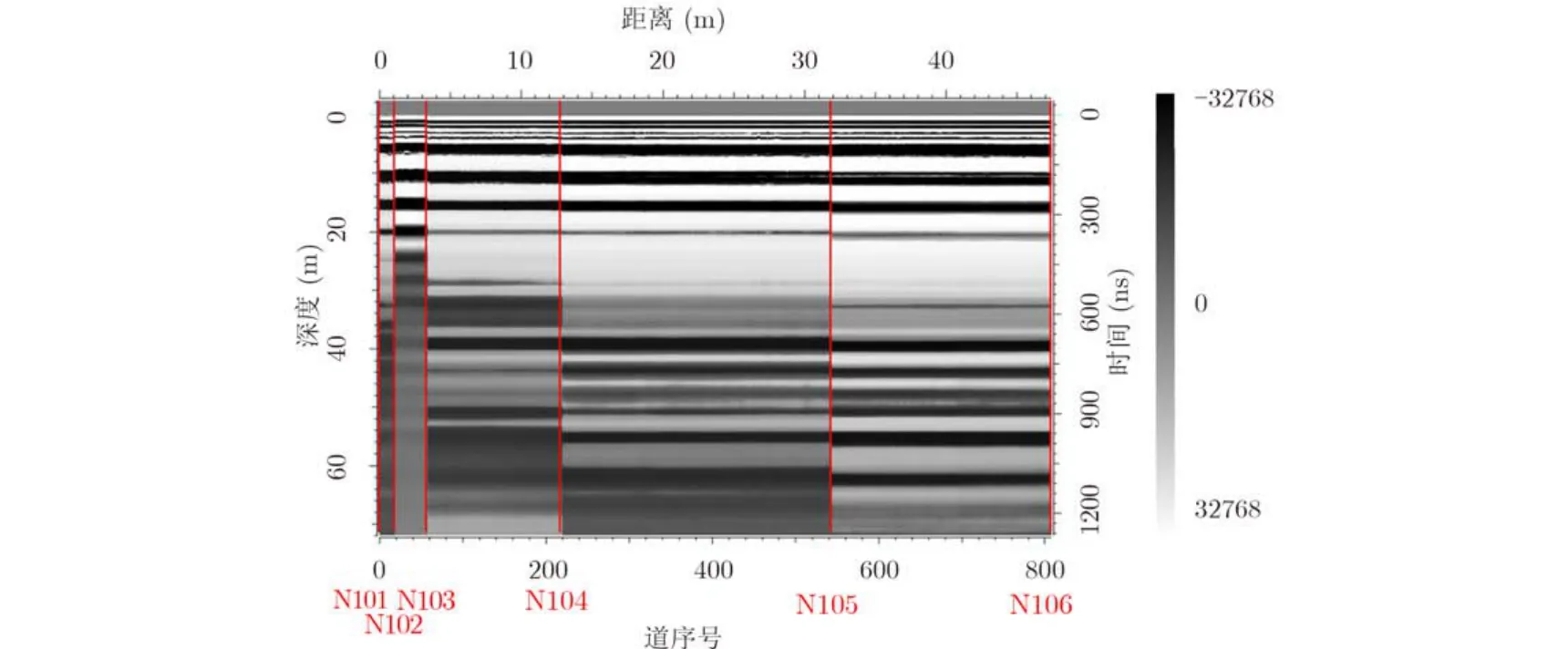
图5 不同增益参数造成的图像不连续Fig. 5 Discontinuity of radar image due to different gain parameters
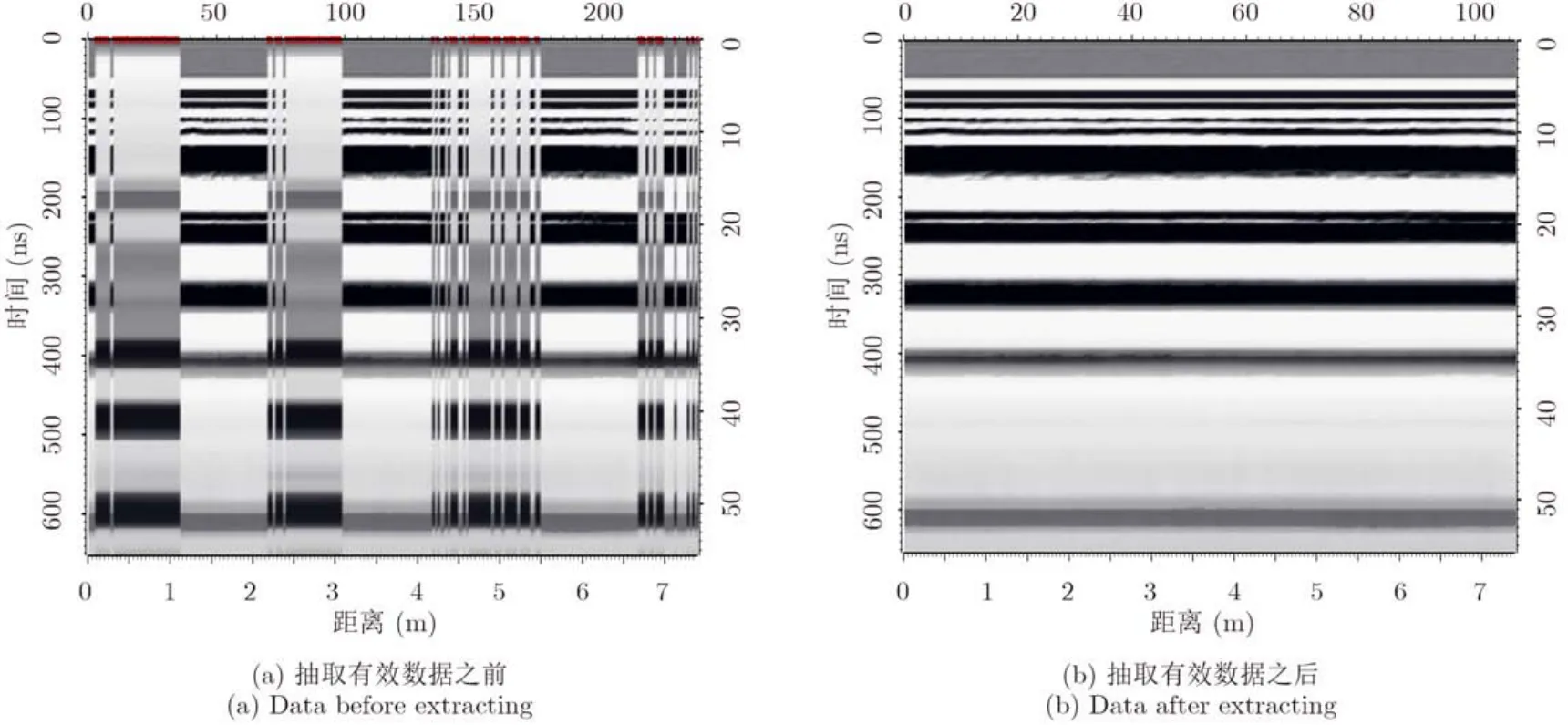
图6 抽取移动过程中的有效数据Fig. 6 Extracting valid data while CE-3 rover moving
4.3增益还原处理
测月雷达以较低的采样位数获得了较大的动态范围,使弱信号增益大而强信号增益小。数据处理时为了真实反映地下反射的强弱关系,或需要雷达反射幅度绝对大小时(比如利用幅度信息反演介电常数),必须把接收时与幅度相关的增益还原回来。
做增益还原之前必须先做归一化处理,因为每个点的幅度值范围与累加次数有关,需要把不同累加次数的数据归一到无累加时的取值范围内。将无符号的16 bit的道科学数据按照累加次数归一化方法如式(4)所示:

然后,按式(5),式(6),式(7)对测月雷达科学数据进行增益还原:

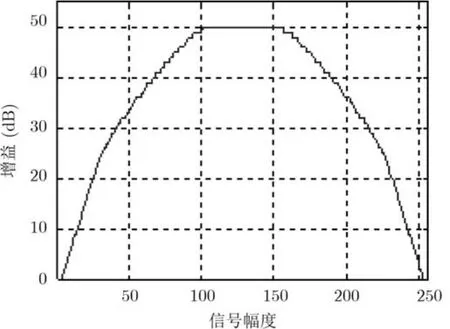
图7 增益还原系数曲线Fig. 7 Curve of gain restoring
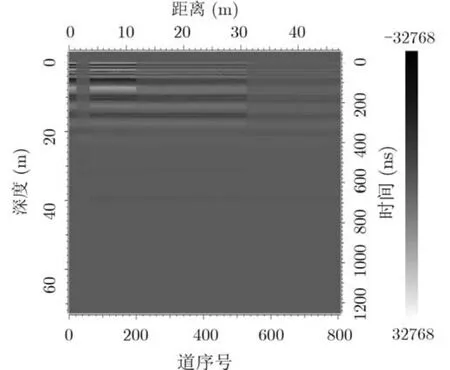
图8 增益还原处理结果Fig. 8 Result of gain restoring
4.4道间均衡处理
从图8可以看出,浅部信号增益还原后仍然有一些不连续,这可能与测月雷达工作时月球气温变化有关,使道与道之间的能量不均衡。因为雷达天线具有较宽的波束,因此相邻距离回波间的相关性很强,所以可以使用道间能量均衡的方法对增益还原后的数据做进一步的处理。道间均衡的原理是将各道乘上不同的权重后,能量小的道乘以大的权系数,能量大的道乘以小的权系数,以使各道的能量达到均衡,具体算法如式(8)所示:
式(8),式(9),式(10),式(11)中,M为待均衡的道数,N为每道的采样点数,A为M道的总平均振幅,为第i道的权系数,为每道平均振幅,i,j分别为道序号和采样点序号,为均衡前第i道、第j点的回波幅度值,为均衡后第i道、第j点的幅度值。
对每道数据都按上述方法处理,就完成了道间均衡处理。对图8所示结果做道间均衡处理,得到的结果如图9所示,可以看出相邻数据段之间的成像不连续得到进一步的改善。
4.5滤波处理
由于系统噪声、空间干扰等的影响,原始数据必须进行滤波处理,以提高回波信号的信噪比。测月雷达第1通道的设计主频为50 MHz,但做频谱分析后发现主频约为20 MHz,如图10所示。由电磁波传播理论可知,这与电磁波传播过程中高频分量衰减较快而低频分量衰减较慢有关。低频成分主要决定探测深度,而高频成分决定探测细节,必须根据不同需要来选取滤波参数。如果想提取月表之下地质结构分层信息,通带范围应该选取低频部分;如果想提取浅层细节信息,通带范围应该选取高频部分。根据测月雷达设计工作频带和频谱分析结果,经过反复对比,发现滤波通带参数为10~30 MHz时,第1道数据达到最佳处理效果。本文对第1通道滤波处理时,滤波参数选择为10~30 MHz,处理结果如图11所示。
4.6饱和信号处理
在N106点之前,CE-3科学载荷一直处于参数调试阶段,测月雷达还未达到最佳工作状态,其中增益偏大造成第1通道浅层信号饱和,导致残留的有效信号被掩盖。为了从饱和信号中尽可能挖掘出有效信息,本文使用了一种水平滑动滤波的处理方法。目的是去除水平方向变化缓慢的饱和信号,以突出变化剧烈的有效信息。该方法的原理是在水平确定一个窗口宽度,在窗口内所有道取平均,窗口中间位置的道减掉这个平均值,如式(12)所示:

图9 道间能量均衡Fig. 9 Trace energy average
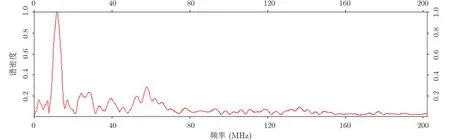
图10 第1通道频谱分析Fig. 10 Spectrum of LPR channel-1

图11 饱和信号处理Fig. 11 Saturated signal processing

该方法的优点是处理效果可以根据窗口宽度N来调节。图11为对N105到N106段数据处理前后的对比结果,可以看出处理后被饱和信号掩盖的回波信息得以凸现出来。
4.7介电常数分析
介电常数在时深转换时影响雷达图像中探测目标的深度信息,一般可以按照以下几种方法计算:
(1)双曲线拟合法
针对地下点目标的双曲线成像特征,根据双曲线的顶点位置和开口大小,反演介电常数;
(2)金属板反射法
利用目标层位反射幅度与金属板反射幅度的比值关系求取介电常数;
(3)最小熵偏移法
遍历所有可能的介电常数,做偏移处理并计算偏移图像的熵值,当熵值最小时对应的图像最清晰,此时的介电常数即为地下真实的介电常数。
由于第1通道主要针对深层探测,在雷达图像中很难找到双曲线反射,双曲线拟合法无法使用;金属板反射法对于表层介电常数计算精度较高,随着不断迭代递推,深层介电常数累计误差越来越大,没有实际意义;最小熵偏移法对第1通道数据理论上是可行的,但是由于数据采集的原因,第1通道存在信号饱和和纵向时差错位,图像熵值也失去了应有的含义。
由上述分析可知,很难根据雷达数据直接得到月球岩石的介电常数,只能利用阿波罗岩石采样的分析结果,由于月球绝对干燥的环境条件以及岩石介电常数的变化范围较小,可以认为月球岩石与阿波罗采样岩石的介电常数基本相同。
4.8结果分析
使用上述处理方法,对CE-3测月雷达从起点N101到终点N209的整体数据进行处理,原始数据如图12(a)所示,处理结果如图12(b)所示。根据阿波罗取样数据,CE-3着陆区月表之下岩石为玄武岩,其介电常数约为7[15]。以此介电常数做时深转换,从图12(b)可以看到第1通道的有效信号深度大于100 m,在约40 m深处存在一条明显的电磁反射异常,用黑色箭头加以标注。
CE-3着陆点位于月球虹湾区域南端,以前的研究指出该区域月球表面之下存在一条地质分界线,并分析了其大致深度(Schaber:10~63 m:Hiesinger:32~50 m;Zhao J N: 小于70 m)[16-18]。我们对测月雷达第1通道数据的处理结果与这些研究成果非常吻合,验证了该层位的存在并给出了其较准确的深度。
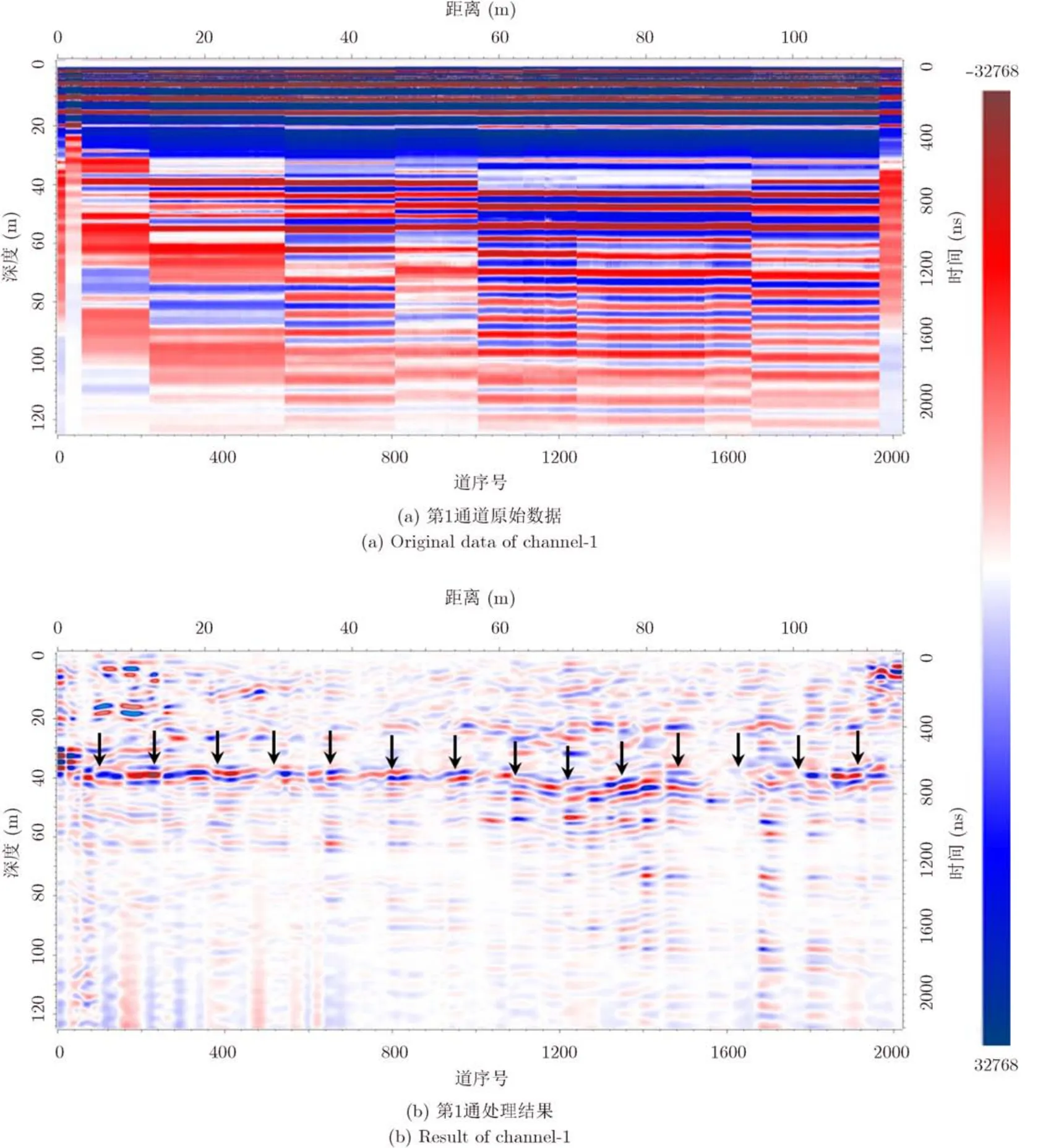
图12 测月雷达第1通道处理结果Fig. 12 Processing result of LPR channel-1
5 结论
本文详细介绍了嫦娥三号测月雷达的系统原理、工作过程和数据特点,在此基础上提出了有针对性的信号处理方法,总结如下:
(1)介绍了CE-3测月雷达的系统原理和工作方式,详细分析了数据特点和存在的问题,提出了合理的信号处理方法和步骤,取得了满意的处理结果;
(2)应用增益还原和道间均衡处理的处理方法,消除了因不同增益参数和工作温度差异造成的图像不连续,提高了雷达成像精度;
(3)采用水平加窗滑动滤波的处理方法,从严重饱和的雷达信号中挖掘出了明显的层位反射信息;
(4)首次取得了CE-3测月雷达第1通道100 m之内的清晰成像结果,验证了CE-3着陆区地下存在一条地质结构分层,并给出了其较准确的深度。
[1]Ip W H,Yan J,Li C L,et al.. Preface: the Chang'e-3 lander and rover mission to the Moon[J]. Research in Astronomy and Astrophysics,2014,14(12): 1511.
[2]Ono T,Kumamoto A,Kasahara Y,et al.. The Lunar Radar Sounder (LRS)onboard theáKAGUYA (SELENE)spacecraft[J]. Space Science Reviews,2010,154(1/4): 145-192.
[3]Ono T,Kumamoto A,Nakagawa H,et al.. Lunar radar sounder observations of subsurface layers under the nearside maria of the moon[J]. Science,2009,323(5916): 909-916.
[4]Nozette S,Spudis P,Bussey B,et al.. The Lunar Reconnaissance Orbiter Miniature Radio Frequency (Mini-RF)technology demonstration[J]. Space Science Reviews,2010,150(1/4): 285-302.
[5]Zhang H B,Zheng L,Su Y,et al.. Performance evaluation of lunar penetrating radar onboard the rover of CE-3 probe based on results from ground experiments[J]. Research in Astronomy and Astrophysics,2014,14(12): 1633.
[6]Schaber G G. Geologic Map of the Sinus Iridum Quadrangle of the Moon,I-602[R]. Washington D C: US Geological Survey,1969.
[7]Hiesinger H,Jaumann R,NeukumG ,et al.. Ages of mare basalts on the lunar nearside[J]. Journal of Geophysical Research: Planets,2000,105(E12): 29239-29275.
[8]Bugiolacchi R and Guest J. Compositional and temporal investigation of exposed lunar basalts in the Mare Imbrium region[J]. Icarus,2008,197(1): 1-18.
[9]Spudis P D,Bussey D B J,Baloga S M,et al.. Evidence for water ice on the Moon: results for anomalous polar craters from the LRO Mini-RF imaging radar[J]. Journal of Geophysical Research: Planets,2013,118(10): 2016-2029.
[10]Jin S,Arivazhagan S,and Araki H. New results and questions of lunar exploration from SELENE,Chang'E-1,Chandrayaan-1 and LRO/LCROSS[J]. Advances in Space Research,2013,52(2): 285-305.
[11]Dai S,Su Y,Xiao Y,et al.. Lunar regolith structure model and echo simulation for Lunar Penetrating Radar[C]. Brussels,Belgium,2014: 1042-1045.
[12]Fang Guang-you,Zhou Bin,Ji Yi-cai,et al.. Lunar penetrating radar onboard the Chang'e-3 mission[J]. Research in Astronomy and Astrophysics,2014,12(1): 1607-1622.
[13]Ye S,Zhou B,and Fang G. Design of a novel ultra wideband digital receiver for pulse ground-penetrating radar[J]. IEEE Geoscience and Remote Sensing Letters,2011,8(4): 656-660.
[14]Su Yan,Fang Guang-you,Feng Jian-qing,et al.. Data processing and initial results of Chang'e-3 lunar penetrating radar[J]. Research in Astronomy and Astrophysics,2014,14(12): 1623-1632.
[15]Heiken Grant H,Vaniman David T,Bevan M French,et al.. Lunar Sourcebook: A User's Guide to the Moon[M]. Cambridge: University Press,1991.
[16]Schaber G G. Lava flows in mare imbrium: geologic evaluation from Apollo orbital photography[C]. Lunar and Planetary Science Conference,1973,4: 73-92.
[17]Hiesinger H,Head J W,Wolf U,et al.. Lunar mare basalt flow units: thicknesses determined from crater sizefrequency distributions[J]. Geophysical Research Letters,2002,29(8): 89-1-89-4.
[18]Zhao J N,Huang J,Qiao L,et al.. Geologic characteristics of the Chang'E-3 exploration region[J]. Science China Physics,Mechanics and Astronomy,2014,57(3): 569-576.

高云泽(1979-),男,副研究员,研究方向为超宽带穿透成像理论研究、超宽带雷达信号处理。

董泽华(1992-),男,博士生,研究方向为超宽带雷达系统设计、超宽带雷达信号处理。

方广有(1963-),男,研究员,研究方向为超宽带雷达成像理论与方法、月球/火星探测雷达技术、地下资源电磁勘探技术、超宽带天线理论与技术、THz成像技术。
The Processing and Analysis of Lunar Penetrating Radar Channel-1 Data from Chang'E-3
Gao Yun-ze①②Dong Ze-hua①②Fang Guang-you①Ji Yi-cai①Zhou Bin①
①(Institute of Electronics,Chinese Academy of Sciences,Beijing 100190,China)
②(University of Chinese Academy of Sciences,Beijing 100049,China)
Lunar Penetrating Radar (LPR),which is one of the most important science payloads onboard the Chang'E-3 (CE-3)rover,is used to obtain electromagnetic image less than 100 m beneath the lunar surface. This paper describes the system composition and working mechanism of the LPR and presents a detailed analysis of its data. We investigated special signal-processing methods and present the result of channel-1 data. The result shows that the effective echo occurs at depths greater than 100 m. Moreover,an unusual reflection exists at depth of 40 m,which may be the boundary of two geological units beneath the lunar surface.
Chang'E-3 (CE-3); Lunar Penetrating Radar (LPR); Data processing; Geological boundary
The Key Research Program of the Chinese Academy of Sciences (KGZD-EW-603-01)
TN958
A
2095-283X(2015)-05-0518-09 DOI:10.12000/JR15030
高云泽,董泽华,方广有,等. 嫦娥三号测月雷达第一通道数据处理与分析[J]. 雷达学报,2015,4(5): 518-526.
10.12000/JR15030.
Reference format:Gao Yun-ze,Dong Ze-hua,Fang Guang-you,et al.. The processing and analysis of lunar penetrating radar channel-1 data from Chang'E-3[J]. Journal of Radars,2015,4(5): 518-526. DOI: 10.12000/JR15030.
2015-03-11;改回日期:2015-06-16;
2015-08-24 *通信作者:方广有gyfang@mail.ie.ac.cn
中国科学院重点部署项目(KGZD-EW-603-01)
