基于STM32F407VE的桥式起重机控制系统设计
2015-10-29宋少敏曹嘉毅
宋少敏 曹嘉毅
(中国人民武装警察部队水电第八支队 四川 成都 610036)
基于STM32F407VE的桥式起重机控制系统设计
宋少敏曹嘉毅
(中国人民武装警察部队水电第八支队四川成都610036)
针对传统桥式起重机控制系统功能单一、布线复杂等问题,设计了以STM32F407VE微处理为控制核心的高性能控制系统。STM32F407VE通过RS485总线与变频器通讯,对桥式起重机各执行机构的电机进行控制;通过键盘和触摸屏接收用户命令并显示系统运行状况。该控制系统具有良好的人机界面,能实时响应用户命令并显示系统运行状态,布线简单,提高了系统的稳定性和可靠性。
桥式起重机;控制系统;STM32F407VE;RS232;RS485
引言
桥式起重机广泛应用于工厂、码头、室内外仓库和露天贮料场等处,是使用数量最多的一种起重机械,越来越多的应用场合对桥式起重机控制的实时性和自动化程序提出了更高的要求[1]。传统的桥式起重机控制系统多采用按键直接控制的方式,这种控制方法功能单一,没有用户界面因此不能显示系统的运行状态,接线繁杂,给维护带来了很大的不便。设计更高效、功能更强大、安全性能更好和维护成本更低的桥式起重机控制系统来提高桥式起重机的运行效率、增强可靠性和节省成本具有重大的现实意义。STM32F407VE是基于ARM公司CortexTM-M4架构的32位精简指令处理器,具有高性能、低功耗和低成本等优点,以该芯片构建的桥式起重机控制系统具有实时性高、功能强大的人机界面,使桥式起重机的控制智能化[2]。
1 控制系统总体结构设计
控制系统的核心为STM32F407VE芯片,负责接收用户从键盘或触摸屏中输入的控制命令,并检测传感器采集到的信号,根据用户的命令和传感器检测到的系统状况,实时地控制起重机各部分运动机构的动作以完成相应的功能。起重机控制系统总体结构如图1所示。

图1 起重机控制系统总体结构
STM32F407VE芯片的UART(通用异步收发传输器)接口发出的信号通过MAX232芯片转换成符合RS232通信方式的信号,再通过RS232转RS485转换器,将RS232信号转换成符合RS485总线通信的信号。变频器1~3接入RS485总线,通过RS232转RS485转换器与STM32F407VE芯片通信[3]。
传感器1~N通过A/D转换接口将检测到的模拟信号发送到STM32F407VE中,STM32F407VE的A/D转换模块将传感器的模拟信号转换成数字信号后供应用程序使用。
键盘通过USB接口与STM32F407VE连接,接收用户的控制命令;触摸屏通过SPI接口与STM32F407VE连接,显示控制系统的运行状态并接收用户的控制命令。
2.1STM32F407VE
STM32F407VE是基于ARM公司CortexTM-M4架构的32位精简指令处理器,内核运行频率高达168MHz,具有一个单精度浮点单元(FPU),支持ARM所有单精度数据类型和数据处理指令[4]。该处理器有高性能、低功耗和低成本等优点,具有以下特点:
(1)自适应实时加速器(ART),实现从Flash存储器中零等待运行;具有210DMIPS/1.25DMIPS/MHz的高性能;
(2)Flash:512KB,SRAM:192KB;
(3)LCD并行接口,支持8080/6800两种模式;
(4)丰富的外设资源:12个16位定时器、2个32位定时器、16路12位A/D转换器、82个具有中断功能的GPIO、2路12位D/A转换器、3路SPI,2路I2C,4路USART、2路UART、2个CAN2.0B接口、2个USBOTG接口、1个Ethernet MAC 10/100接口、1个SDIO接口。
2.2通讯接口电路设计
RS-232采用负逻辑电平,电压在3~15V范围内为逻辑0,在-3~-15V范围内为逻辑1。而STM32F407VE的4个USART(通用同步/异步串行接收/发送器)和2个UART(通用异步串行接收/发送器)均为TTL电平。为了使STM32F407VE与RS232转RS485转换器的RS-232接口通信,必须添加电平转换驱动电路,将STM32F407VE的TTL电平转换为符合RS-232通信的电平[5]。本系统采用MAX232芯片完成此功能,通讯接口电路连接原理如图2所示。
2 硬件设计
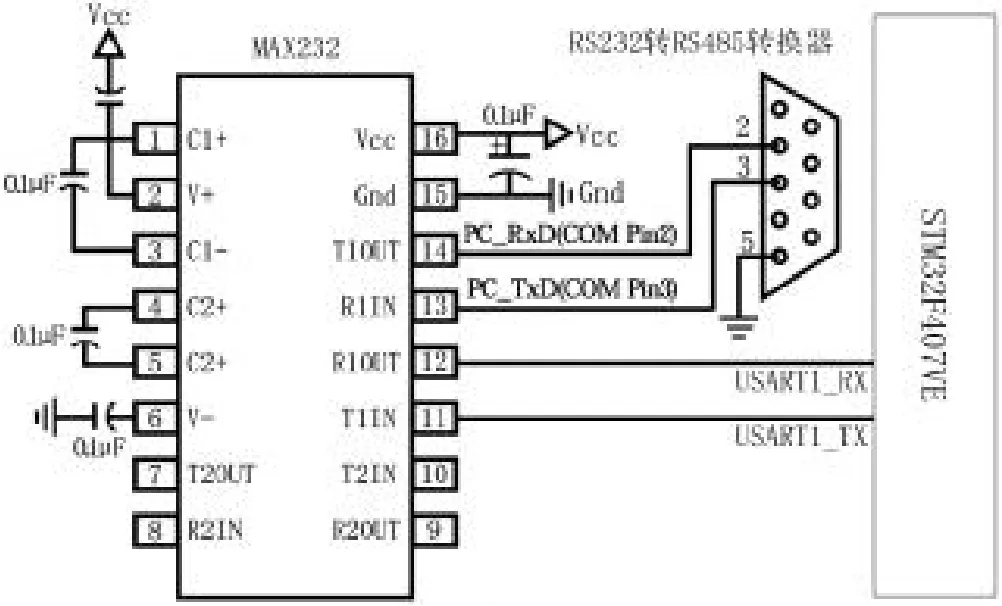
图2 通讯接口电路连接示意图
2.3触摸屏电接口电路设计
STM32F107VE通过SPI1接口与ADS7846相连,触摸屏接口电路连接原理如图3所示。STM32F107VE作为主设备,ADS7846作为从设备。SPI总线系统是一种同步串行外设接口,它可以使MCU与各种外围设备以串行方式进行通信以交换信息。MOSI:主设备数据输出,从设备数据输入;MISO:主设备数据输入,从设备数据输出;SCLK:时钟信号,由主设备产生;NSS:从器件使能信号,由主器件控制[6]。ADS7846是四线式触摸屏控制器,分时向X、Y电极对施加电压,并把测量电极上的电压信号转换为相应触点的X、Y坐标,并通过中断请求通知STM32F407VE有触摸动作发生[7]。

图3 触摸屏接口电路连接示意图
3 系统软件设计
控制系统应用程序主要实现四部分功能:接收用户命令、显示系统运行状态、数据采集和电机控制。
系统上电后首先进行初始化,然后通过RS485总线与变频器通讯,等待变频器就绪,变频器就绪后程序进入主循环,不断接收并响应用户命令、获取传感器采集的数据和显示系统运行状况[8]。控制系统软件流程如图4所示。
4 结语
以STM32F407VE为核心的桥式起重机控制系统提供了更丰富的功能,具有良好的人机界面,实时响应用户命令并显示系统运行状态。采用RS485总线通讯方式,使布线更简单,提高了系统的稳定性和可靠性,节省了维护成本。
[1]李振华,邓朝结.CAN总线在起重机控制中应用[J].机械研究与应用,2009,06:104~105.

图4 控制系统软件流程图
[2]贺勇,陈建华.基于PLC的塔式起重机控制系统的设计[J].微计算机信息,2007,22:85~86+96.
[3]刘艳.MODBUS及以太网通信技术在起重机控制系统中的应用[J].自动化应用,2012,09:44~46.
[4]于立娟.基于CAN总线的起重机控制系统研究[D].燕山大学,2010.
[5]周奇才,曾礼,赵炯,周铁梁,张溧栗.大型起重机自动控制与智能管理系统[J].制造业自动化,2013,11:80~83.
[6]冯达,吴星明.基于C8051FSPI接口液晶触摸屏的控制设计[J].微计算机信息,2005,07:56~57+135.
[7]陈爱青.起重机控制监视系统的探究与展望[J].科技创新导报,2012,29:80.
[8]李伟,李瑞华.起重机智能控制的发展现状与思考[J].煤矿机械,2006,08:3~4.
TP273
A
1673-0038(2015)08-0064-02
2015-2-5
宋少敏(1988-),男,助理工程师,本科,主要从事水电工程方面的工作。
曹嘉毅(1987-),男,工程师,本科,主要从事水电工程方面的工作。
