新型大工作空间仿生被动球面铰链构型及工作空间分析
2015-10-29邱雪松侯雨雷周玉林
邱雪松 杨 龙 侯雨雷 周玉林
燕山大学,秦皇岛,066004
新型大工作空间仿生被动球面铰链构型及工作空间分析
邱雪松杨龙侯雨雷周玉林
燕山大学,秦皇岛,066004
被动球面铰链是构成机构的基本单元之一,但是,较小的工作空间制约了其在机械结构设计中的应用。以普通被动球面铰链为原型,在对其结构及工作空间进行分析的基础上,采用运动与约束单项分解、交叉匹配的方法,提出并设计完成了具有较大工作空间的双耳支架固定型被动球面铰链和球/窝换位型被动球面铰链;基于仿生设计理论,对照人体肱骨结构,提出偏置输出的设计新思想,进而,设计完成具有大工作空间的偏置输出的横向剖分球窝型被动球面铰链和偏置输出的球/窝换位型被动球面铰链;建立两空间映射的函数方程。分析发现,随着铰链输出杆偏置角的增大,铰链的工作空间随之增大,并且形状发生相应变化。所提出的新型铰链,解决了被动球面铰链因工作空间小而在工程应用中受到限制的问题,对新型被动球面铰链的研制具有理论指导意义和工程实践价值。
球面铰链;大工作空间;仿生;偏置输出
0 引言
被动球面铰链是一种可转动连接,通常由固连输出杆的球头与固连支撑杆的球窝构成,当一端固定时,另一端具有三个转动自由度,是机构学中基本的运动单元之一。
目前,国内外对球面铰链的研究多针对具体应用场合。高金莲等[1]利用球铰极限转角不对称的特点,设计完成了3-RSS/S型踝关节康复并联机器人球铰链,并给出了球铰链仿真设计法的一般步骤。Heisel等[2]设计了一种可控制的球面铰链,用来决定六足机器人的工作空间。Doru[3]提出了角能量函数的概念,用来表述球面铰链的结构所允许的运动范围。邓志诚等[4]提出了一种用于可重构移动机器人的主动球铰,既满足了机器人的结构尺寸要求,又能提供较大的输出力矩和工作空间。崔学良等[5]针对大载荷和大姿态要求的工况,设计了一种由三个转动副组成的,具有高刚度、大偏转角的复合铰链。张林初等[6]设计了一种新型球铰装置,以满足飞机大部件与通用工装快速联接形成球铰的要求,并能够在调姿完成后夹紧以防止转动。王巍等[7]将两个丝杠摇块机构支链并联且与一个旋转机构串联,构成主动球铰机构。周玉林等[8]发明了一种输出杆摆动空间大,结构简单,体积小的球面铰链。在工作空间分析方面,孙立宁等[9]通过对虎克铰工作空间详细地仿真和研究,建立了分析此类问题的模型拟合法和更加精确的模型解析法。张立杰等[10]研究了球面二自由度5R并联机器人的理论工作空间形成原理,根据理论工作空间的形成条件建立该并联机器人的设计空间。曹永刚等[11]利用全局搜索法得到6-RSS机构的一组最优机构参数,在机构整体尺寸基本不变情况下使工作空间增大60%。
现有对被动球面铰链的研究,多针对具体的目标要求,设计具有特殊结构的被动球面铰链,而被动球面铰链工作空间小的问题,一直没有很好的解决方法,这非常不利于其实际工程应用。如含有被动球面铰链的并联机床,因受球面铰链工作空间小的制约,无法实现较大的工作空间要求;人形机器人中的球面(关节)铰链工作空间小而不能满足肢体运动要求等,因此,设计一种具有大工作空间的被动球面铰链具有重要的理论意义和工程应用价值。
本文针对普通被动球面铰链工作空间较小的问题,首先提出具有较大工作空间的新型被动球面铰链构型;然后依据仿生设计思想,提出偏置输出的设计思想,进一步设计完成具有大工作空间的新型被动球面铰链,并对其工作空间进行了分析。研究工作对新型球面铰链的设计具有理论指导意义。
1 普通被动球面铰链结构及工作空间
一般被动球面铰链的结构有两种形式,如图1所示。其中图1a所示为横向剖分球窝型,即被过球心且与支撑杆轴线垂直的横向剖面分割成两部分,与支撑杆固连的半球窝称为支撑球窝,另一部分套装于输出杆上的环形结构称为约束球窝,并与支撑球窝固连,从而限制球头及输出杆的线位移;图1b所示为纵向剖分球窝型,即过支撑杆轴线的纵向剖面将铰链分割成对称的两半,两个半球窝扣在一起含住球头,然后再彼此固连[12]。
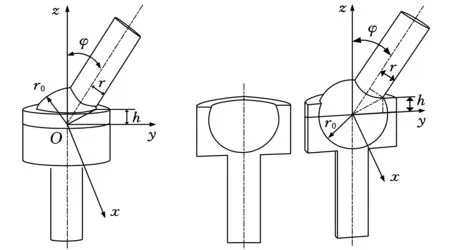
(a)横向剖分球窝型(b)纵向剖分球窝型图1 典型被动球面铰链结构
取球心点O为原点,建立固定坐标系Oxyz,其中,z轴穿过球心与下支撑杆轴线重合,正向向上;y轴穿过球心与z轴垂直,正向向右;x轴由右手螺旋法则确定。
输出杆绕x轴、y轴的摆角为
φ=90°-arcsin(r/r0)-arcsin(h/r0)
(1)
式中,r为输出杆的半径;h为约束球窝的高度;r0为球头半径。
动力传动中,为保证机构强度,一般情况下铰链输出杆半径、约束球窝的高度不能太小,取r/r0=0.25,h/r0=0.3,则φ=58.07°。
因此,一般被动球面输出杆绕x轴、y轴的摆动范围不会超过(-58°,58°)。若要获得更大空间,必须改变构件之间的相对关系,并进行结构等效转换。
2 具有较大工作空间的被动球面铰链
将横向剖分球窝型被动球面铰链作为设计原型机构。由式(1)可以看出,增大铰链的球半径,可使输出杆绕x轴、y轴的摆角φ增大,但是铰链的体积亦会随之增大。
将约束球窝的半径增大,变成一个新的大尺寸约束球窝,并且与支撑球窝分开,同时,在两者之间增设滚动支撑件、形成一个等效球头,使其一端满足支撑球窝的接触受力与运动要求,另一端满足约束球窝的运动要求,则可以在增大铰链输出杆摆动范围的同时,将铰链体积控制在较小范围内。
根据上述设想,提出具有较大工作空间的被动球面铰链的设计规则如下:
(1)保持传统被动球面铰链的运动特征不变,将绕任意轴的三个转动等效为绕三个正交轴的转动。
(2)保持支撑球窝半径不变,增大约束球窝半径,采用支撑球窝与约束球窝分离的结构。
(3)彼此分离的两球窝之间,设计特殊的可动支撑、形成等效球头或等效球头-球窝结构。
2.1双耳支架固定型被动球面铰链
图2所示为设计的新型大空间的双耳支架固定型被动球面铰链。双耳支架与下支撑杆固连。U形拨叉为半圆弧形柱面组合体,在其轴向宽度中间平面内,沿圆周方向有径向内外通透的封闭长槽;两端设有销孔,装在双耳支架的外侧,可绕装在双耳支架两侧的销轴往复摆动。
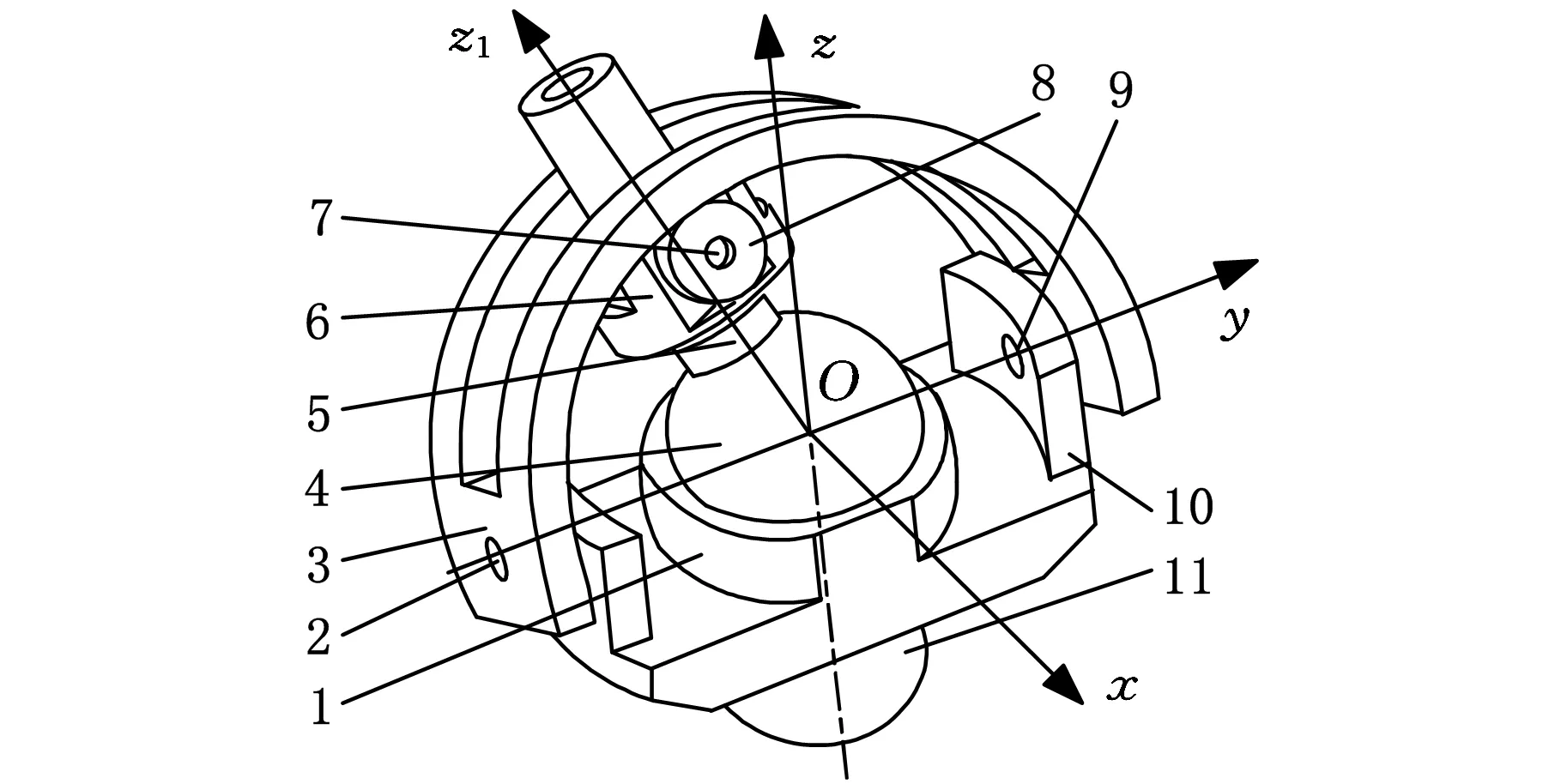
1.支撑球窝 2.销轴 3.U形拨叉 4.球头 5.输出杆 6.旋转支架 7.支撑销轴 8.支撑辊 9.销轴 10.双耳支架 11.下支撑杆图2 双耳支架固定型被动球面铰链
旋转支架(可动支撑件)为回转体,中间为圆柱形孔,前后各安装有支撑销轴,一对支撑辊对称装于相应的两个销轴上,可相对输出杆转动。
输出杆为阶梯形轴,中间设有轴向定位台阶,旋转支架连同装在其上的支撑销轴、支撑辊一起套装在输出杆上。位于旋转支架上的支撑辊与U形拨叉圆弧内表面接触,支撑辊的轴线与U形拨叉圆柱面的轴线平行,以实现支撑。输出杆下端与球头对心固定并置于支撑球窝中构成球面运动副。
输出杆具有正交的三个转动:沿槽侧壁往复摆动;与U形拨叉一起,绕装在双耳支架两侧的销轴往复摆动;绕输出杆轴线不受限制地独立旋转。
等效球头由旋转支架、支承销轴、支撑辊、输出杆阶梯部分下端球头构成。
取球心点O为原点,建立固定坐标系Oxyz,其中,y轴穿过球心与双耳支架两侧销轴的轴线重合,正向向右;z轴穿过球心与下支撑杆轴线重合,正向向上;x轴由右手螺旋法则确定。
输出杆绕x轴摆角为
φx=90°-arcsin(rm/R0m)-arcsin(hm/R0m)
其中,hm为双耳支架的销轴轴线到上边界的高度,R0m为U形拨叉的半径。取rm/R0m=0.25,hm/R0m=0.2,则φx=63.99°。
输出杆绕y轴摆角为
φy=90°-arcsin(rm/r0m)
其中,rm为输出杆的半径,r0m为球半径。取rm/r0m=0.25,则φy=75.52°。
因此,双耳支架固定型被动球面铰链输出杆绕x轴摆动范围约为(-64°,64°);绕y轴摆动范围约为(-76°,76°);绕自身轴线的旋转不受限制。与传统被动球面铰链比较,输出杆绕x轴、y轴摆动范围分别增大16°(13%)、36°(31%)。
2.2球/窝换位型被动球面铰链
观察图2发现,上述被动球面铰链在结构上存在一个缺点:当输出杆绕y轴摆角较大,且输出杆所受轴线方向压力较大时,球头容易从球窝中脱出。这一点已被人体的肩、髋关节的脱臼所证实。所以,对其结构做进一步改进,提出新的球/窝换位型被动球面铰链结构,如图3所示。

1.销轴 2.U形拨叉 3.球头 4.输出杆 5.旋转支架 6.支撑销轴 7.支撑辊 8.销轴 9.双耳支架 10.下支撑杆 11.活动球窝图3 球/窝换位型被动球面铰链
与双耳支架固定型被动球面铰链相比,球/窝换位型被动球面铰链结构的不同之处为:球头与支撑球窝的位置对调,即球头与下支撑杆在球心点对心固定,而支撑球窝的尺寸由原来的半球减小为球缺,成为活动球窝,与输出杆在下端(以输出杆轴线与活动球窝回转轴线重合为条件)固定,活动球窝与固定球头接触构成球面副;U形拨叉置于双耳支架内侧,消除了旋转支撑架随输出杆运动到两侧时与双耳支架的硬干涉。
活动球窝变小,一定程度上避免了构件间的硬干涉,输出杆的摆动范围变大;另外,活动球窝与球头之间的作用力始终位于两者的法线上,即作用线过输出杆轴线与球心。这样受力更加合理,解决了输出杆处于极限位置时,球窝与球头容易脱臼的问题。
类似地,取球心点O为原点,建立固定坐标系Oxyz。球/窝换位型被动球面铰链输出杆绕x轴、y轴摆动范围分别约为(-68°,68°)、(-110°,110°);绕自身轴线的旋转不受限制。与传统被动球面铰链比较,输出杆绕x轴、y轴摆动范围分别增大20°(17%)、104°(90%)。
3 偏置输出的设计思想
经过改造所设计的新型双耳支架固定型被动球面铰链和球/窝换位型被动球面铰链,工作空间虽然较传统球面副有一定程度的增大,但仍难以满足工程上对被动球面铰链工作空间的应用需求。
分析发现,上述被动球面铰链的工作空间完全由输出杆的两方向摆角决定,虽然输出杆绕自身轴线的旋转不受限制,但是没有反映到铰链的输出运动中,即绕自身轴线的旋转对铰链输出的作用被掩盖了。
人体髋关节的结构属于传统的被动球面铰链结构[13],但是其运动空间明显远远大于传统被动球面铰链的工作空间。观察发现,人体股骨与传统被动球面铰链的输出杆有明显的不同:股骨整体呈弯拐状,股骨颈与股骨体夹角[14]为55°~62°,如图4所示。

图4 人体股骨结构
对比人体股骨结构可知,上述被动球面铰链输出杆绕自身轴线的旋转对输出的作用被掩盖的根本原因是:输出杆的轴线始终与其旋转轴线重合。
依据仿生设计原则,提出铰链输出杆偏置的设计思想,即输出杆轴线向任意方向偏折而离开其旋转轴线,释放输出杆绕原自身轴线的旋转对铰链输出范围的影响,从而进一步扩大铰链的工作空间。
4 偏置输出的横向剖分球窝型被动球面铰链及其工作空间分析
4.1偏置输出的横向剖分球窝型被动球面铰链
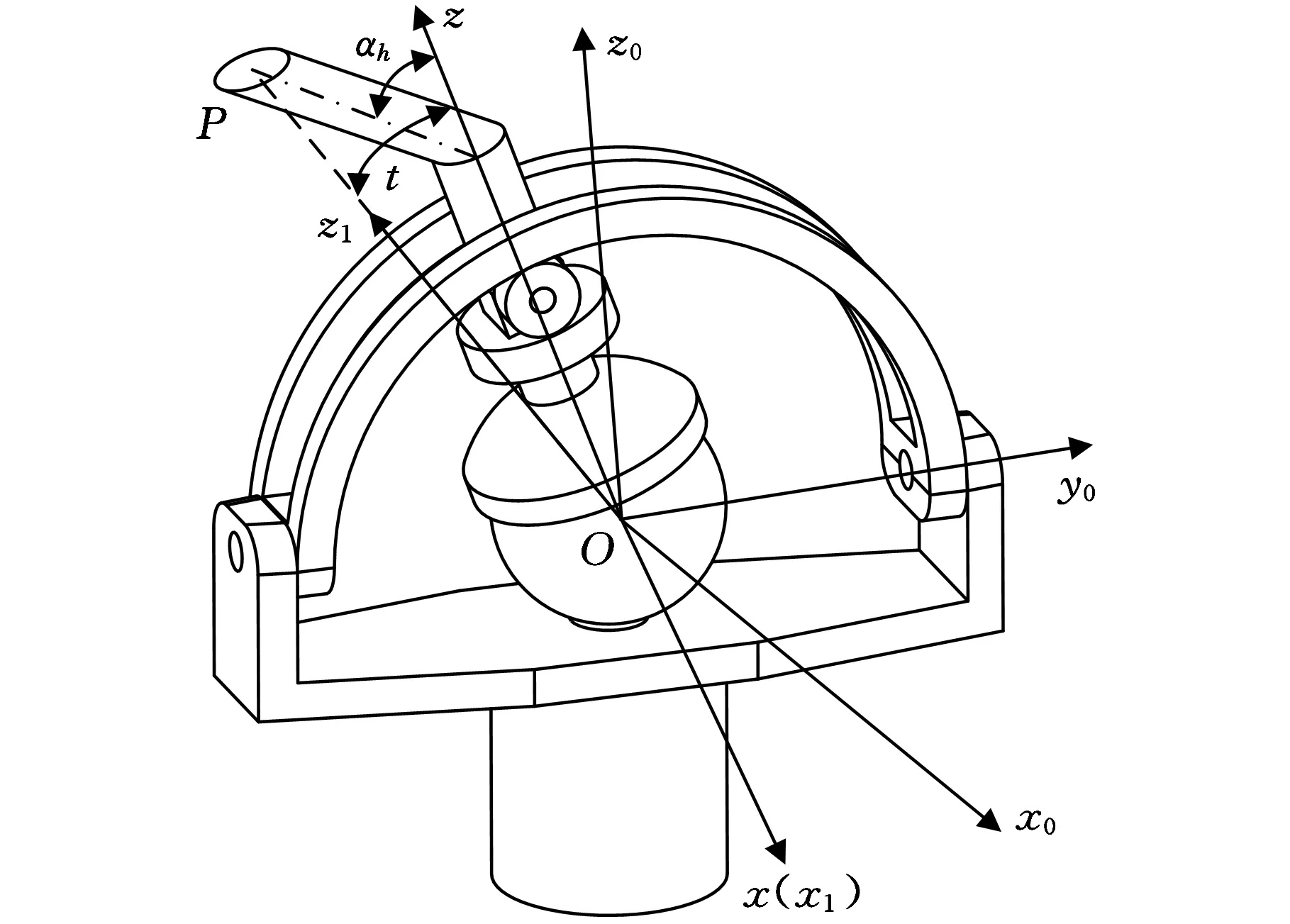
以横向剖分球窝型传统被动球面铰链为原型,将原输出杆在中心附近的一部分保留,称为直输出杆,余下的部分向任意方向偏折某一角度使其轴线偏离直输出杆轴线,称为偏置输出杆,形成新型偏置输出的横向剖分球窝型被动球面铰链,如图5所示。

图5 偏置输出的横向剖分球窝型被动球面铰链
偏置输出杆轴线与直输出杆轴线的夹角称为偏摆角αh,偏摆方向为任意的。偏置输出杆轴线末端点P与球心点的连线OP是实际的输出杆轴线,它与直输出杆轴线的夹角称为偏置角t。
4.2新型铰链与原型铰链工作空间的映射函数
取铰链的球心点O为坐标原点,建立固定坐标系Ox0y0z0、动坐标系Oxyz和偏置坐标系Ox1y1z1。
其中,固定坐标系与下支撑杆固连,z0轴与下支撑杆轴线重合,正向向上,y0轴穿过球心与z轴垂直,正向向右,x0轴由右手螺旋法则确定;动坐标系与直输出杆固连,初始位置与固定坐标系正向重合,即x轴、y轴、z轴分别与x0轴、y0轴、z0轴正向重合;偏置坐标系与输出杆整体固连,假定直输出杆和偏置输出杆所构成的平面与Ozy面重合,取OP为z1轴,正向向外,x1轴与x轴正向重合,y1轴由右手螺旋法则确定。
动坐标系Oxyz的运动空间表达了横向剖分球窝型传统被动球面铰链的工作空间;偏置坐标系Ox1y1z1的运动空间表达了偏置输出的横向剖分球窝型被动球面铰链的工作空间。根据空间映射原理,这两个工作空间存在一定的映射关系。

式中,cφx=cosφx、sφx=sinφx,其余类似;左上下标C、D分别表示动坐标系、固定坐标系。
偏置坐标系在动坐标系下的描述矩阵为
式中,左下标P表示偏置坐标系。
所以,偏置坐标系经动坐标系,在固定坐标系下的描述矩阵为


由此,得到偏置输出的横向剖分球窝型被动球面铰链工作空间与横向剖分球窝型传统被动球面铰链工作空间的映射:
4.3偏置输出的横向剖分球窝型被动球面铰链的工作空间
为避免输出杆和约束球窝之间的干涉,偏置角t的最大值可取为90°。随着偏置角t的增大,铰链的工作空间逐渐变大,并且形状发生相应变化。
(1)当0≤t<φ0(φ0为传统被动球面铰链的极限摆角)时,铰链的工作空间逐渐由原来的小球缺变为大球缺、小球冠,如图6所示。
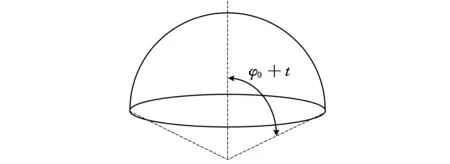
图6 当0≤t<φ0时,偏置输出的横向剖分球窝型被动球面铰链的工作空间
(2)当t=φ0时,铰链的工作空间变为球冠,如图7所示。此时工作空间最大,且无空洞。

图7 当t=φ0时,偏置输出的横向剖分球窝型被动球面铰链的工作空间
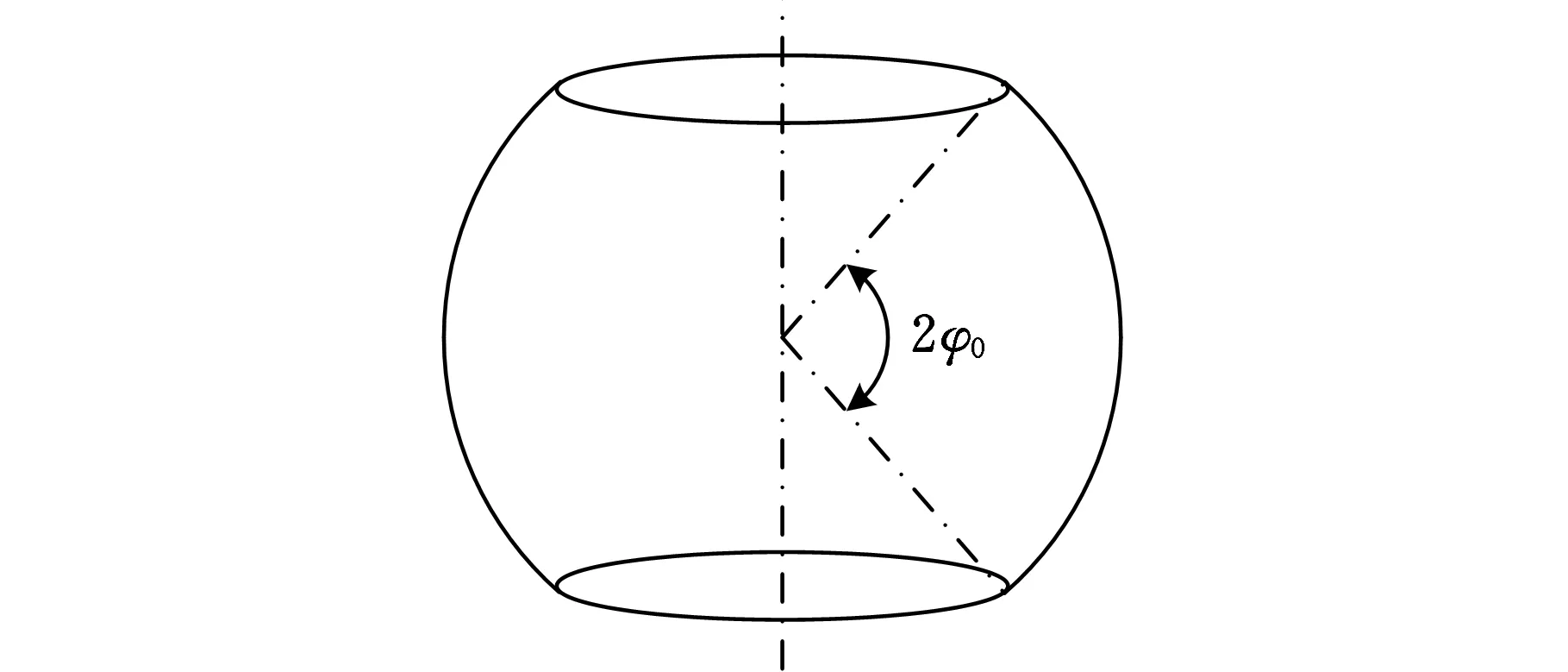
(3)当φ0 图8 当φ0 (4)当t=90°时,铰链的工作空间变为对称球面环带,如图9所示。此时工作空间出现对称空洞。 图9 当t=90°时,偏置输出的横向剖分球窝型被动球面铰链的工作空间 当偏置角t=90°时,输出杆绕x0轴、y0轴的最大摆动范围分别约为(-116°,116°)。 与传统球面铰链比较,工作空间进一步增大,且形状发生改变。 以球/窝换位型被动球面铰链为原型,对其输出杆做偏置改进,得到偏置输出的球/窝换位型被动球面铰链,如图10所示。 图10 偏置输出的球/窝转换型被动球面铰链 类似地,取铰链的球心点O为坐标原点,建立固定坐标系Ox0y0z0、动坐标系Oxyz和偏置坐标系Ox1y1z1。 图10中,固定坐标系与下支撑杆固连,z0轴穿过球心与下支撑杆轴线重合,正向向上,y0轴穿过球心与双耳支架两侧销轴的轴线重合,正向向右,x0轴由右手螺旋法则确定;动坐标系与直输出杆固连,初始位置与固定坐标系正向重合,即x轴、y轴、z轴分别与x0轴、y0轴、z0轴正向重合;偏置坐标系与输出杆整体固连,假定直输出杆和偏置输出杆所构成的平面与Ozy面重合,取OP为z1轴,正向向外,x1轴与x轴重合,y1轴由右手螺旋法则确定。 同理,得到偏置输出的球/窝换位型被动球面铰链工作空间和球/窝换位型被动球面铰链工作空间的映射关系: 随着偏置角t的增大,铰链的工作空间由对称球缺逐渐变为大球冠,当t达到最大值时,其工作空间几乎覆盖了整个球面,如图11所示。 图11 偏置输出的球/窝换位型被动球面铰链的工作空间 当偏置角t达到最大值时,输出杆绕x0轴、y0轴的最大摆动范围分别约为(-158°,158°)、(-180°,180°),此时空间无空洞。 与球/窝换位型被动球面铰链相比,输出杆绕x轴、y轴的摆动范围分别增大180°(132%)、140°(64%)。与传统被动球面铰链相比,输出杆绕x轴、y轴的摆动范围分别增大200°(176%)、244°(210%)。 本文基于普通球面铰链,提出并设计完成具有较大工作空间的新型被动球面铰链;根据仿生设计理论,提出偏置输出的设计思想,激活了绕z轴的转动空间,进而设计出具有大工作空间的被动球面铰链;依据空间映射原理,建立了新型铰链与原型铰链工作空间之间的映射函数,分析了新型铰链工作空间特征。所提出的新型大工作空间仿生被动球面铰链解决了普通被动球面铰链工作空间小的根本问题,对工程中现有装备的改进和新型机械的结构设计具有重要意义。 [1]高金莲,韩英强,李波,等. 并联机器人球铰链的仿真设计[J]. 机械设计, 2007, 24(2): 53-55. GaoJinlian,HanYingqiang,LiBo,etal.SimulativeDesignontheGlobeHingeofParallelRobot[J].JournalofMachineDesign, 2007, 24(2): 53-55. [2]HeiselU,StrutinskiyS,SidorkoV,etal.DevelopmentofControllableSphericalFluidFrictionHingesforExactSpatialMechanisms[J].ProductionEngineering, 2011, 5(3): 241-250. [3]DoruT.TheAngularCapacityofSphericalJointsUsedinMechanismswithClosedLoopsandMultipleDegreesofFreedom[J].RoboticsandComputer-IntegratedManufacturing, 2012, 28(5): 637-647. [4]邓志诚,王巍,宗光华. 用于可重构地面移动机器人的主动球铰[J]. 北京航空航天大学学报, 2006, 32(12):1455-1458. DengZhicheng,WangWei,ZongGuanghua.ActiveSphericalJointforModularReconfigurableMobileRobot[J].JournalofBeijingUniversityofAeronauticsandAstronautics, 2006, 32(12):1455-1458. [5]崔学良,韩先国,陈五一. 特殊复合铰链3-RPS并联机构及其连续刚度模型[J]. 北京航空航天大学学报, 2010, 36(11):1275-1280. CuiXueliang,HanXianguo,ChenWuyi.ContinuousStiffnessModelingof3-RPSParallelKinematicMachinewithSpecialCompositeSphericalJoints[J].JournalofBeijingUniversityofAeronauticsandAstronautics, 2010, 36(11):1275-1280. [6]张林初,蒋君侠. 一种新型球铰装置的设计与分析[J]. 机床与液压, 2012, 40(22):1-4. ZhangLinchu,JiangJunxia.DesignandAnalysisforaLate-modelBallSocketDevice[J].MachineTool&Hydraulics, 2012, 40(22):1-4. [7]王巍,张厚祥,邓志诚,等. 基于串并联机构的自重构移动机器人[J]. 机械工程学报, 2008, 44(5): 92-101. WangWei,ZhangHouxiang,DenZhicheng,etal.ReconfigurableMobileRobotBasedonSerialandParallelMechanism[J].ChineseJournalofMechanicalEngineering, 2008, 44(5): 92-101. [8]周玉林,高峰. 具有大工作空间球面铰链:中国,101334063A[P].2008-12-31. [9]孙立宁,于凌涛,杜志江,等. 并联机器人胡克铰工作空间的研究与应用[J].机械工程学报, 2006, 42(8): 120-124. SunLining,YuLingtao,DuZhijiang,etal.StudyandApplicationofWorkspaceonHookeJointinParallelRobot[J].ChineseJournalofMechanicalEngineering, 2006, 42(8): 120-124. [10]张立杰,牛跃伟,李永泉,等. 基于工作空间的球面5R并联机器人机构设计[J]. 机械工程学报, 2007, 43(2): 55-59. ZhangLijie,NiuYuewei,LiYongquan,etal.MechanismDesignofSpherical5RParallelManipulatorBasedonWorkspace[J].ChineseJournalofMechanicalEngineering, 2007, 43(2): 55-59. [11]曹永刚,张玉茹,马运忠. 6-RSS型并联机构的工作空间分析与参数优化[J]. 机械工程学报, 2008, 44(1): 19-24. CaoYonggang,ZhangYuru,MaYunzhong.WorkspaceAnalysisandParameterOptimizationof6-RSSParallelMechanism[J].ChineseJournalofMechanicalEngineering, 2008, 44(1): 19-24. [12]侯雨雷, 胡鑫喆, 周玉林. 新型过约束球面并联式关节机构仿生设计[J]. 中国机械工程, 2014, 25(6): 723-726,730. HouYulei,HuXinzhe,ZhouYulin.BionicJointDesignBasedonaNovelOver-constrainedSphericalParallelMechanism[J].ChinaMechanicalEngineering, 2014, 25(6): 723-726,730. [13]周玉林,高峰. 仿人机器人构型[J]. 机械工程学报, 2006, 42(11): 66-74. ZhouYulin,GaoFeng.MechanismArchitectureofHumanoidRobot[J].ChineseJournalofMechanicalEngineering, 2006, 42(11): 66-74. [14]FrankelH,NordinM, 黄庆森.股骨系统基本生物力学[M].天津:天津科学技术出版社,1986. (编辑郭伟) Configuration and Workspace Analysis of a Novel Bionic Passive Spherical Hinge with Large Workspace Qiu XuesongYang LongHou YuleiZhou Yulin Yanshan University,Qinhuangdao,Hebei,066004 The passive spherical hinge is one of the basic units of mechanisms, but the small workspace limits its applications in the design of general mechanical structure. The traditional passive spherical hinge was chosen herein as the prototype and its structure, workspace were analyzed. And then, the binaural bracket fixed type passive spherical hinge and the ball and socket interchanged type passive spherical hinge were proposed by the method of decomposing motion and constraint separately and staggered matching, and the workspaces of the two passive spherical hinges were large. The design idea of offset output was proposed according to the theory of bionic design and the structure of human humerus. Based on this design idea, the ball socket laterally split type passive spherical hinge with offset output and the ball and socket interchanged type passive spherical hinge with offset output were proposed, and the workspaces of the two passive spherical hinges were super large. It is shown that the workspaces increase and their appearance changes correspondingly in pace with the increase of the offset angle of the output rod.The proposed passive spherical hinge expands its application range in the field of the mechanical structure and it has theoretical significance for the development of novel passive spherical hinge. spherical hinge; large workspace; bionic; offset output 2014-06-23 国家自然科学基金资助项目(51305384,51275443);河北省自然科学基金资助项目(E2012203034);教育部科学技术研究重点项目(212012);河北省高等学校科学技术研究优秀青年基金资助项目(Y2011114);高等学校博士学科点专项科研基金资助项目(20111333120004) TP24DOI:10.3969/j.issn.1004-132X.2015.03.012 邱雪松,女,1973年生。燕山大学机械工程学院讲师、博士。主要研究方向为机器人机构学、重型装备构型理论及机电集成技术。发表论文10余篇。杨龙,男,1988年生。燕山大学机械工程学院博士研究生。侯雨雷,男,1980年生。燕山大学机械工程学院副教授、博士。周玉林(通信作者),男,1961年生。燕山大学机械工程学院教授、博士研究生导师。
5 偏置输出的球/窝换位型被动球面铰链及其工作空间分析
6 结束语
