不同类型遥感传感器对地覆盖区域仿真与计算
2015-10-28巫兆聪杨帆王楠巫远朱卓娃
巫兆聪,杨帆,王楠,巫远,朱卓娃
1.武汉大学遥感信息工程学院,武汉430079 2.天津市勘察院,天津300191
不同类型遥感传感器对地覆盖区域仿真与计算
巫兆聪1,杨帆1,王楠1,巫远1,朱卓娃2
1.武汉大学遥感信息工程学院,武汉430079 2.天津市勘察院,天津300191
分析了遥感传感器对地覆盖的几何特性,将常见的遥感传感器按照成像覆盖模式分为球冠面圆形覆盖和球面四边形覆盖,推导了两类覆盖模式的投影几何,建立了星下点和侧摆两种成像方式下的对地覆盖区域仿真计算模型.基于覆盖区域仿真模型和星地空间基准的转换关系,设计了通用于常见遥感传感器的对地覆盖区域仿真算法流程,以实际的卫星平台、传感器和轨道参数实验验证了该仿真算法的有效性.
遥感传感器;对地观测;覆盖区域仿真
随着遥感应用需求的深入发展,遥感卫星正逐步形成以气象、资源、海洋、环境、灾害监测等为观测对象的卫星群,组成长期稳定运行的对地观测体系,为灾害预报、环境监测、资源调查、城市规划等诸多领域提供了稳定、持续和可靠的空间遥感信息.
在卫星传感器对地成像覆盖仿真、应急观测服务、遥感影像数据查询、遥感任务规划等常见应用中均需要计算传感器对地成像覆盖区域.例如,在传感器对地成像覆盖仿真与卫星影像数据查询中需要计算传感器在某具体时刻的对地成像覆盖区域,为遥感影像的获取和查询提供支持;在应急观测响应和遥感任务规划中需要结合卫星上搭载传感器的类型、成像方式以及侧摆情况计算出传感器侧摆成像下有能力覆盖到的区域.
研究人员将现有的传感器对地覆盖模型简化为圆锥投影或矩形投影模型,如文献[1-2]研究了卫星左右侧摆覆盖带以及对地面覆盖带的简单计算方法,并没有结合传感器来严格考虑覆盖区域;文献[3]将传感器覆盖区域简化为圆形覆盖区域;文献[4-5]研究了传感器侧摆成像时覆盖四边形区域的计算;文献[6]介绍了圆锥和矩形两种覆盖模型以及对地覆盖边界的简化计算模型;文献[7]提出一种适用多传感器类型的计算覆盖区域的数学模型,虽然模型普适性强,但是在考虑不同类型传感器的对地覆盖时存在一定误差;文献[8-10]针对传感器可见性和具体目标的覆盖提出了相应的算法,但计算模型没有考虑到不同类型传感器成像方式不同的问题.
由上述分析可知遥感传感器种类繁多,对地观测成像的原理和方式各异,在遥感传感器对地覆盖仿真中如果不充分考虑传感器的类型及其成像方式,只是简单地将覆盖区域简化为圆形或矩形,就不能精确地表示不同类型传感器的对地覆盖区域模型,且对地覆盖区域的计算误差会影响到遥感应用和服务决策以及遥感信息的获取.
若要建立不同类型遥感传感器的成像覆盖模式及对地覆盖几何模型,精确地计算不同类型传感器在不同成像方式下的对地覆盖区域范围,则应在详细了解和分析不同类型传感器的成像原理和工作方式的基础上,将常见遥感传感器按照成像覆盖模式进行分类,研究球冠面圆形覆盖和球面四边形覆盖在星下点和侧摆成像情况下的投影几何以及覆盖区域仿真模型,建立传感器的投影几何模型和对地覆盖区域模型,设计覆盖区域的计算方法和流程.
1 遥感传感器成像覆盖模式及其分类
1.1遥感成像传感器覆盖模式分析
遥感传感器分为成像和非成像传感器,本文主要研究成像传感器对地覆盖模式.被动成像方式中光学遥感相机(主要包括画幅式相机、全景式相机、大幅面相机、多谱段相机等)利用物镜的光学视场对地面覆盖,对地成像覆盖与CCD元件大小和视场角有关[11],对地覆盖模式为球面矩形覆盖模式;像面扫描成像方式传感器(主要包括摄影机、固体扫描仪等)瞬间在像面上形成一条线图像或一幅二维影像,然后沿垂直卫星运行方向对像面扫描成像;物面扫描成像方式传感器(主要包括红外扫描仪、光机扫描仪等)沿垂直卫星运行方向对地面进行扫描成像,扫描类型传感器对地面覆盖区域与CCD元件以及扫描镜的摆动角度等有关[11],对地覆盖模式为球面四边形覆盖模式.
主动成像方式中全景雷达(主要包括微波辐射计等)探测卫星星下点周围360◦范围一定距离内的圆形地区[11],对地覆盖模式为球冠面圆形覆盖模式;侧视雷达按平面扫描方式(主要包括真实孔径雷达和合成孔径雷达等)工作时,利用微波脉冲探测地物进行条带式或聚束式扫描[11],对地成像覆盖模式为球面矩形覆盖模式;侧视雷达按圆锥扫描方式(主要包括微波散射计等)工作时,对地成像覆盖模式为球冠面圆形覆盖模式.
1.2基于成像覆盖模式的遥感传感器分类
按照上述分析,球冠面圆形覆盖模式和球面四边形覆盖模式可以描述如下:
1.2.1球冠面圆形成像覆盖模式
球冠面圆形覆盖模式表示遥感卫星传感器对地面的可视范围,以及部分遥感传感器如全景雷达成像或辐射计的对地成像覆盖.球冠面圆形覆盖模式在星下点成像条件下的对地覆盖区域为以卫星星下点为中心,视场角对应幅宽为直径的球冠面圆形区域;在侧摆成像条件下的对地覆盖区域为以偏移星下点为中心的球面椭圆区域.
1.2.2球面四边形成像覆盖模式
球面矩形成像覆盖模式涵盖大部分的光学传感器以及侧视雷达平面扫描传感器的对地成像覆盖.球面四边形成像覆盖模式在传感器星下点成像条件下的对地覆盖区域为以卫星星下点为中心,视场角对应幅宽和沿卫星飞行方向距离为两条边长的球面矩形区域;在侧摆成像条件下的对地覆盖区域为球面梯形区域.
在基于遥感传感器成像方式分类和遥感传感器成像覆盖模式研究的基础上,本文将遥感传感器按照成像覆盖模式进行归纳与分类,分类结果见图1.
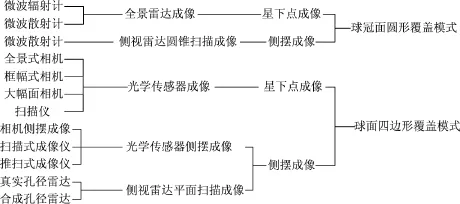
图1 基于成像覆盖模式的遥感传感器分类Figure 1 Classifcation of the remote sensors based on the imaging modes
对不同类型的传感器基于成像覆盖模式进行分类后,下文研究球冠面圆形覆盖模式和球面四边形覆盖模式在传感器星下点和侧摆成像条件下的对地覆盖区域的仿真模型和覆盖区域的计算方法.
2 球冠面圆形覆盖模式仿真
传感器球冠面圆形覆盖区域模型见图2.
在传感器星下点成像时,对地成像覆盖区域为图2中以O为圆心的球冠面圆形区域.卫星传感器对地面的可视范围、全景雷达成像等情况下的对地覆盖区域用圆形覆盖区域表示,卫星传感器对地面的可视范围由卫星轨道高度、传感器的视场角决定,全景雷达成像覆盖模式的覆盖区域由雷达天线探测范围决定.
在传感器侧摆成像条件下,传感器对地成像区域中心由卫星的星下点O随着侧摆移动到O1或O2,覆盖区域由球面圆形变为球面椭圆.侧视雷达圆锥扫描成像等情况下的对地覆盖区域用球冠面椭圆表示,覆盖区域范围由卫星轨道高度、雷达波束俯角及探测范围决定.
STK(Satellite Tool Kit)为美国AGI公司设计的专业卫星仿真软件,在卫星轨道与传感器仿真领域应用广泛,可提供传感器对地覆盖仿真功能,仿真结果可靠[12].因此,本文将两种覆盖模式的对地覆盖仿真区域与STK仿真的覆盖区域进行比较和验证.
利用STK对球冠面圆形覆盖模式中传感器星下点成像和侧摆成像覆盖区域进行仿真,以验证本文的球冠面圆形覆盖模式,如图3所示.结合图2对球冠面圆形覆盖模式的描述及图3中STK的仿真结果,STK中传感器在星下点成像情况下验证了覆盖区域为球面圆形,在侧摆成像情况下验证了覆盖区域为球面椭圆.

图2 球冠面圆形对地覆盖模式Figure 2 Mode of spherical circular coverage
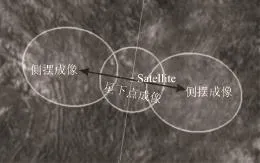
图3 STK中球冠面圆形覆盖区域仿真Figure 3 Simulation of the spherical circular coverage in STK
3 球面四边形覆盖模式仿真
传感器球面四边形覆盖区域模型见图4.
在传感器星下点成像情况下,对地成像覆盖区域为球面矩形,如图4中以O为中心的球面矩形区域.光学框幅式和全景式等相机以及扫描式和推扫式等成像仪成像覆盖模式对地面的覆盖区域用球面矩形来表达.框幅式和全景式CCD相机的对地覆盖范围由卫星轨道高度、视场角、CCD像元尺寸等决定,扫描式和推扫式等扫描仪的对地覆盖范围由卫星轨道高度、扫描镜摆动角度、探测器尺寸、瞬时视场等决定.
在传感器侧摆成像条件下,传感器对地成像区域中心由卫星的星下点O随着侧摆角度移动为O1或O2,覆盖区域由球面矩形变为近似的球面梯形形状.在光学框幅式和全景式等相机侧摆成像条件下、在扫描式和推扫式等成像仪扫描镜摆动一定角度扫描成像条件下,以及雷达按照侧向平面扫描方式工作条件下,对地覆盖区域利用球面梯形表示.
利用STK对球面四边形覆盖模式星下点成像和侧摆成像覆盖区域进行仿真,以验证本文的球面四边形覆盖模式,如图5所示.结合图4对球面四边形覆盖模式的描述以及图5中STK的仿真结果,STK中传感器在星下点成像情况下验证了覆盖区域为球面矩形,在侧摆成像情况下验证了覆盖区域为球面梯形.

图4 球面四边形对地覆盖模式Figure 4 Mode of spherical quadrilateral coverage

图5 STK中球面四边形覆盖区域仿真Figure 5 Simulation of the spherical quadrilateral coverage in STK
4 传感器覆盖区域计算及仿真
4.1计算模型
在球冠面圆形覆盖模式情况下,只需计算圆或椭圆长轴与短轴的4个点(图2中的A、B、C、D);在球面四边形覆盖模式情况下,只需计算四边形的4个顶点(图4中的E、F、G、H),即可确定传感器对地覆盖区域范围.本文利用传感器对地成像矢量关系(见图6),经过传感器坐标系→卫星本体坐标系→卫星轨道坐标系→地心惯性坐标系→地心固定坐标系→大地坐标系的空间坐标系转换流程[13-14],联立传感器成像视线方程与地球椭球体方程,实现对传感器覆盖区域的计算,其具体步骤如下:
步骤1建立传感器对地观测成像视线模型
本文将传感器和卫星之间的安装矩阵定为单位矩阵,卫星本体坐标系到轨道坐标系的转换通过卫星姿态角的变化实现.转换矩阵为Ab0=Cz(R)Cy(P)Cx(Y),其中R为滚动角,P为俯仰角,Y为偏航角.根据传感器的视场角θ和侧摆角β设置滚动角和俯仰角,建立传感器对地观测的成像视线,如A、B、C、D这4点的滚动和俯仰角分别为(β+θ/2,0)、(β,θ/2)、(β-θ/2,0)、(β,-θ/2).

图6 传感器对地成像矢量关系图Figure 6 Schematic of sensor's imaging vectors
步骤2通过卫星的轨道六根数或卫星星历,计算卫星在地心惯性坐标系中的坐标[XS,YS,ZS].
步骤3建立传感器成像视线方程
假设地面成像点在地心惯性坐标系中的坐标为[XT,YT,ZT],根据成像矢量关系建立向量模型RST=RET-RES=[XT-XS,YT-YS,ZT-ZS]T.令RL=[l1,l2,l3]T=Ab0RES,则传感器成像视线的直线方程可表示为

步骤4建立地球椭球模型方程
RET满足地球椭球方程,可表示为

式中,a和b分别为地球参考椭球的长半径和短半径,a=6 378.14 km,b=6 356.755 km.
步骤5计算地面成像点经纬度坐标
根据式(1)和(2)可求出观测视线与地球表面交点的空间坐标,取其中离卫星较近的交点,即为T点的坐标[XT,YT,ZT].通过转换矩阵CZ(θt)(其中θt对应时刻点的格林尼治恒星时)实现T从地心惯性坐标系转换为地心固定坐标系下的坐标[X,Y,Z],再将地心固定坐标转换为大地坐标系下的纬度和经度值[B,L]

步骤6确定传感器覆盖区域范围
根据传感器覆盖模式设置对应的滚动角和俯仰角,建立卫星对地观测成像视线,根据步骤3~5,计算能够确定传感器对地覆盖区域边界4个点的经纬度坐标.若传感器覆盖模式为球冠面圆形覆盖,则对地覆盖区域为以AC和BD为轴的球冠面圆形或椭球区域;若传感器覆盖模式为球面四边形覆盖,则对地覆盖区域为以EFGH为顶点的球面四边形区域.
4.2仿真对比及分析
基于上述计算模型与流程,在相同的卫星轨道六根数和传感器视场角参数情况下,分别计算球冠面圆形覆盖模式和球面四边形覆盖模式下4个顶点的经纬度坐标值,与STK中传感器对地覆盖区域的仿真结果进行比较,以验证本文的计算模型.
本文实验比较球面四边形覆盖模式的传感器在轨绕地球运行多个重复周期内的观测区域数据,实验中卫星的轨道参数采用遥感卫星常用的轨道高度范围和轨道倾角范围,设定仿真中卫星轨道高度为500 km,倾角为97.4◦,偏心率为0,近地点幅角为0◦,升交点赤经为310.22◦,在传感器的水平和垂直半视场角分别为15◦和5◦的成像条件下,以及侧摆10◦角度情况下,统计本文算法计算的球面四边形覆盖区域顶点与STK仿真区域顶点纬度和经度上的差值情况.经纬度的最小差值、最大差值、平均差值和方差的统计结果见表1.

表1 覆盖区域顶点与STK仿真结果经纬度差值统计Table 1 Statistics of the D-value of the vertices'latitude and longitude between the article's calculation process and the simulation of STK
经过对本文算法的仿真计算,与STK仿真结果的对比分析,本文算法在星下点成像情况下的经纬度误差在1‰度量级,在侧摆成像情况下的经纬度误差在1%度量级,能够满足传感器对地覆盖区域仿真的精度要求.本文传感器覆盖区域计算精度与STK仿真结果存在误差的主要原因如下:本文将地球简化为椭球模型,与实际的地球模型存在着误差;在计算卫星星下点时没有考虑到轨道摄动等因素.
5 结语
本文将遥感传感器的成像覆盖模式分为球冠面圆形和球面四边形覆盖模式两种,对传感器按照成像覆盖模式进行分类,并分别设计了传感器在星下点成像和侧摆成像条件下的球冠面圆形和球面四边形对地覆盖模式的仿真模型.结合两种传感器对地覆盖模式和对地覆盖区域的特点,设计了传感器对地覆盖区域范围的计算方法和流程.通过遥感卫星不同类型传感器的成像实时覆盖区域计算,可以准确地得到遥感卫星对地观测区域范围,在诸多遥感应用领域中具有重要的应用价值.
[1]李大耀.卫星沿轨道运动对地面覆盖带外沿轨迹的确定[J].中国空间科学技术,1992,6(3):19-24.Li D Y.An Investigation on outer boundary of earth's surface band region covered with a satellite in orbital motion[J].Chinese Space Science and Technology,1992,6(3):19-24.(in Chinese)
[2]闫野,任萱,陈磊.卫星对地球覆盖情况的判据及算法探讨[J].宇航学报,1999,4:55-60. Yan Y,Ren X,Chen L.Criterion and algorithm of satellites coverage situation[J].Journal of Astronautics,1999,4:55-60.(in Chinese)
[3]樊鹏山,熊伟,李智.载荷侧摆情况下卫星覆盖区域计算方法研究[C]//系统仿真技术及其应用,2009,11:536-540. Fan P S,Xiong W,Li Z.The calculating approach of satellite coverage area with swinging of payloads[C]//System Simulation Technology&Application,2009,11:536-540.(in Chinese)
[4]翁慧慧.遥感卫星对地覆盖分析与仿真[D].郑州:解放军信息工程大学,2006.
[5]刘述民,顾行发,余涛.基于Web的资源卫星覆盖查询设计与仿真[J].计算机仿真,2008.12:49-53. Liu S M,Gu X F,Yu T.Design and simulation of inquiries about resource satellite coverage on Web[J].Computer Simulation,2008,12:49-53.(in Chinese)
[6]胡雅斯,孟新,李立钢.适用多传感器的卫星对地覆盖计算模型[J].遥感技术与应用,2009,8:537-542. Hu Y S,Meng X,Li L G.A satellite coverage computing model for multi-sensor[J].Remote Sensing Technology and Application,2009,8:537-542.(in Chinese)
[7]潘伟.卫星瞬时视场仿真与遥感影像可视化研究[D].南京:河南大学,2010.
[8]Ali I,Al-Dhahir N,Hershey J E.Predicting the visibility of LEO satellites[J].IEEE Transactions on Aerospace and Electronic Systems,1999,35(4):1183-1190.
[9]RancourT M W,CapTain K P,Coleman D J.Development of an IKONOS coverage prediction application[C]//Symposium on Geospatial Theory,Processing and Application,Ottawa 2002.
[10]Marchand B G,Kobel C J.Geometry of optimal coverage for targets against a space background subject to visibility constraints[C]//AAS/AIAA 18th Space Flight Mechanics Meeting,2008.
[11]日本遥感研究会.遥感精解[M].北京:测绘出版社,2011.
[12]Peng H,Chen S.Usage of STK development kit[J].Radio Engineering of China,2007,11:22.
[13]曹平,章文毅,马广彬.遥感卫星成像模型研究及仿真[J].遥感信息,2014,29(3):62-66. Cao P,Zhang W Y,Ma G B.Imaging model of remote sensing satellite and its simulation[J].Remote Sensing Information,2014,29(3):62-66.(in Chinese)
[14]王涛,张艳,张永生,潘申林.高分辨率遥感卫星传感器严格成像模型的建立及验证[J].遥感学报,2013,17(5):1087-1102. Wang T,Zhang Y,Zhang Y S,Pan S L.Construction and validation of rigorous imaging model for high-resolution remote sensing satellites[J].Journal of Remote Sensing,2013,17(5):1087-1102.(in Chinese)
(编辑:管玉娟)
Coverage Area in Different Types of Remote Sensors:Simulation and Calculation
WU Zhao-cong1,YANG Fan1,WANG Nan1,WU Yuan1,ZHU Zhuo-wa2
1.School of Remote Sensing and Information Engineering,Wuhan University,Wuhan 430079,China 2.Tianjin Institute of Geotechnical Investigation and Surveying,Tianjin 300191,China
The paper analyzes geometric coverage of common remote sensors for earth observation.These are classifed into two modes:spherical circular coverage and spherical quadrilateral coverage.Projective geometries of the two coverage modes are induced and simulation models of coverage in nadir and side imaging modalities built.Based on the simulation models,a universal calculation process is established for geometric coverage of common remote sensors,including transformations among six ground and spatial coordinate systems.Simulations are carried out with real satellite and sensor parameters,showing efectiveness of the proposed calculation process.
remote sensor,earth observation,geometric coverage simulation
P237
0255-8297(2015)01-0001-08
10.3969/j.issn.0255-8297.2015.01.001
2014-11-26;
2014-12-28
民用航天“十二·五”预先研究项目基金(No.2013669-7)资助
巫兆聪,博士,教授,研究方向:高分辨率遥感、定量遥感、遥感传感器仿真,E-mail:zcwoo@whu.edu.cn
