深海ROV多层脐带缆绞车卷筒力学分析
2015-10-27庄广胶
庄广胶,王 彪,吴 超,陈 强,葛 彤
(1. 上海交通大学 船舶海洋与建筑工程学院,上海 200240;2. 徐州徐工随车起重机有限公司,江苏 徐州 221000)
深海ROV多层脐带缆绞车卷筒力学分析
庄广胶1,王 彪1,吴 超1,陈 强2,葛 彤1
(1. 上海交通大学 船舶海洋与建筑工程学院,上海 200240;2. 徐州徐工随车起重机有限公司,江苏 徐州 221000)
通过对深海ROV脐带缆微元段受力情况的分析,基于简化理论模型的假设,建立了能够模拟脐带缆绞车卷筒受力情况的理论模型。对比某绞车的实验数据,验证了本力学模型的正确性。通过对实例的计算分析,能够为深海ROV脐带缆绞车的设计工作提供理论支持。
深海ROV;卷筒;绞车;力学分析;脐带缆;稳定性;强度分析
水下机器人已成为海洋开发尤其是深海开发的重要工具[1],而有缆遥控ROV(remotely operated underwater vehicle) 具有功率大、控制延时短、安全可靠等优点,尤其是带有光纤脐带缆的ROV还有信号传输速率快可以实时观察海底高清画面的凸出优点,因此ROV在现有水下机器人领域中占有很大比例。由于深海ROV的工作水深大,其配套脐带缆长度很长。通常作业深度3 500 m以深的ROV所配备的脐带缆需要达到4 000 m以上,对于工作水深6 000 m的ROV,脐带缆甚至需要达到7 000 m。由于深海ROV都是电动的大功率设备,长距离输电会有电压降,为了减少脐带缆的压降,脐带电缆的导线都较粗,另一方面为了保证如此长的脐带缆有良好的抗拉强度,脐带缆外部一般都有两层铠装钢丝。以上两方面原因导致脐带缆的线密度非常大,当脐带电缆从母船下放到海水中后,悬垂的脐带缆会由于重力作用对绞车的卷筒形成很大的挤压力,这就对与之配套的脐带缆绞车提出了更高的要求。首先,深海ROV配套的脐带缆绞车由于需要缠绕数千米的脐带缆,通常缠绕脐带缆多达九至十层,脐带缆对卷筒挤压力非常大;第二,脐带绞车在回收ROV至出水面时(即在浪溅区),会附加较大的动载荷,动载系数甚至超过两倍ROV重量;第三,深海ROV绞车一般需要升沉补偿功能,电机会驱动卷筒随着波浪升沉正反转,要求卷筒转动惯量小(壁厚薄),可以降低驱动电机功率,减小能耗。基于上述三个方面,相比传统工程机械领域的绞车,该类绞车对强度和稳定性要求都要更高,目前国内尚无此类绞车的产品。
现有的设计方法和力学模型多针对工程机械领域的绞车,许多学者对卷筒的强度和稳定性进行了分析和计算[2-5],也对绞车乱绳现象等细节问题进行了研究[6],关于有缆遥控ROV配套的绞车研究多数集中在控制系统的问题上[7-9],而对于绞车卷筒的强度分析研究还不深入。卢其进等[10]研究了母船垂荡导致ROV脐带缆参量共振的现象,以稳定性图为基准分析脐带缆在多种典型工况下的动力响应,着重讨论了系统阻尼对于脐带缆稳定性的影响;康守权等[11]通过对脐带缆张力和牵引力的分析对自动排缆的问题进行了研究;陈育喜等[12]提出了储存和牵引机构分离的双绞车结构方案,并对各个绞车受力状态和功率分配进行了分析。但是这些研究工作都没有涉及绞车的强度问题分析。Popa[13]提出了一种建立多层脐带缆缠绕绞车的力学模型,并通过对比Dietz[14]对某绞车的实验数据,验证了所提出的理论。该模型用脐带缆拉力连续模拟升绳区的过渡,但是不能满足卷筒的力矩平衡条件。本文提出了基于受力平衡的绞车力学模型,能够更准确的模拟多层脐带缆绞车的力学特性。
1 脐带缆绞车力学模型
基于简化理论模型的考虑,对绞车的建模中遵循以下假设:
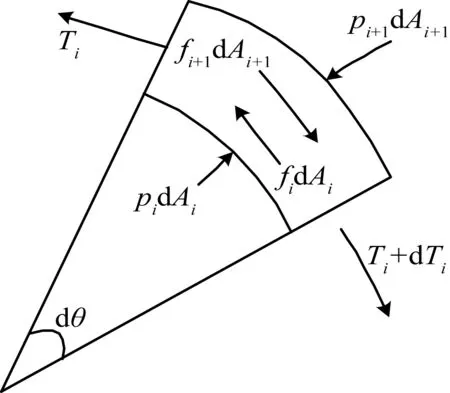
图1 第i层脐带缆微元段受力简图 Fig. 1 Mechanical sketch of umbilical cable’s differential element on i layer
1)脐带缆缠绕在卷扬机卷筒上时有一定的入射角α(通常入射角取α∈[0.5°,2°]),由于入射角一般较小,在计算中不考虑入射角的影响;
2)假设在升绳阶段,脐带缆的轴向拉力满足力矩平衡条件;
3)不考虑脐带缆径向挤压变形引起每层脐带缆弯曲半径的变化;
4)假设脐带缆缠绕N层,每一层共有zmax匝,每匝(缠绕一周)缠绕角度为2π。
建立广义坐标系(i,z,θ)用来确定脐带缆的任意位置。第i层脐带缆的微元段(缠绕角为dθ)受力情况如图1所示。
在微元段中脐带缆受到轴向拉力、上下脐带缆层(或卷筒)的正压力及摩擦力,在卷筒径向方向满足受力平衡条件:
其中,pi=pi(z,θ)为第i层脐带缆对下层脐带缆或卷筒的压力密度,Ti=Ti(z,θ)为第i层第z匝上缠绕角度θ处的脐带缆轴向拉力,Ai为第i层脐带缆微元段投影面积,满足dAi=bridθ,b为微元段投影宽度,近似为脐带缆的直径,ri为第i层脐带缆轴线的曲率半径。将式(1)中的高阶项约去,得到:
在卷筒切向方向满足受力平衡条件:

考虑fi=μpi(μ为脐带缆层与层之间的摩擦系数),整理式(3)得到:
综合式(2)和式(4),得到脐带缆第i层轴向拉力Ti关于缠绕角θ的微分方程:
脐带缆在第i层、第z匝、缠绕角度θ处的轴向拉力:
其中,θ0=2πzmax为单层脐带缆总的缠绕角度,T为脐带缆末端受到ROV的拉力。
脐带缆起始端受到卷筒的拉力T0为:
由式(2)得到奇数层、偶数层脐带缆的内外径处压力密度关系:
其中,j为整数。式(8a)为奇数层脐带缆的内外径处压力密度关系,式(8b)为偶数层脐带缆的内外径处压力密度关系。
最后一层(第N层)脐带缆外径压力密度为零,内径压力密度:
由式(8)、(9)得到每层脐带缆内外径处压力密度关系,并将各式的等号左右两边各项相加,得到卷筒受到第1层脐带缆的压力密度:
其中,式(10a)为奇数层脐带缆作用下卷筒受到的压力密度,式(10b)为偶数层脐带缆作用下卷筒受到的压力密度。
卷筒受到脐带缆的摩擦力密度:
将卷筒作为薄壁圆筒进行校核,分别计算卷筒径向、周向和轴向应力:
其中,υ是卷筒材料的泊松比。
通过第四强度理论校核绞车卷筒在脐带缆缠绕下的强度:
2 数值算例
2.1力学模型的验证
Dietz[14]在恒定拉力作用下,通过黏贴在卷筒表面的应变片测量不同卷绕卷数下卷筒的应力,对五层脐带缆的绞车进行了实验研究。
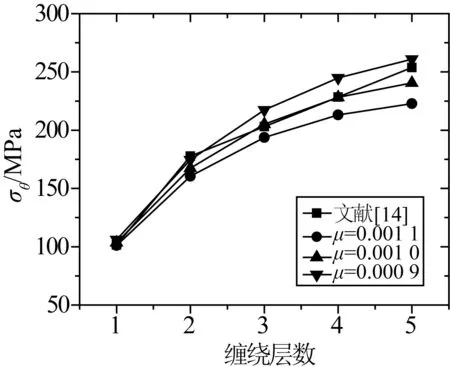
图2 卷筒在1~5层脐带缆卷绕下的最大周向正应力σθ对比Fig. 2 Maximum stress σθcomparison of multi-layer drum
卷筒的基本参数:内径D=560 mm,壁厚t=10 mm,材料为高强度钢。
脐带缆的参数:直径d=23 mm,线密度ρA=7.85 kg/m,末端拉力T∞=20 kN。
为了验证本文建立的理论模型,对Dietz[6]实验用的绞车进行了分析,由式(12b)计算1~5层脐带缆卷绕下卷筒的周向正应力σθ计算结果与实验结果的对比,如图2所示。
从图2可以看出,取μ=0.001 0时,建立的理论模型计算结果与机械设计手册的计算结果最为接近。Popa[13]在研究工作中参照Dietz[14]的实验数据,验证了脐带缆的摩擦系数μ取0.000 9~0.000 13时,模型计算结果与实验数据能够较好地吻合。提出的理论模型在建模时,考虑了卷筒的力矩平衡,更接近绞车的实际工作状态,建议取摩擦系数μ=0.001 0。
2.2实例分析
以“大洋一号”科学考察船配备的深海ROV绞车设计为例,通过所建立的力学模型对该绞车的强度进行分析,并对绞车的设计提供理论支持。
卷筒的基本参数:内径D=1 400 mm,壁厚t=25 mm,有效宽度2 728 mm,每层缠绕76匝脐带缆。
脐带缆的参数: RS340钢丝铠装缆,直径d=34.4 mm,海水中单位长度重量ρA=3.2 kg/m(考虑浮力影响),缠绕层数n=9。
载荷:系统重量(包括ROV本体和中继器)8 000 kg,浪溅区(脐带缆缠绕9层)安全系数2.07,安全系数从挪威船级社标准中获得。
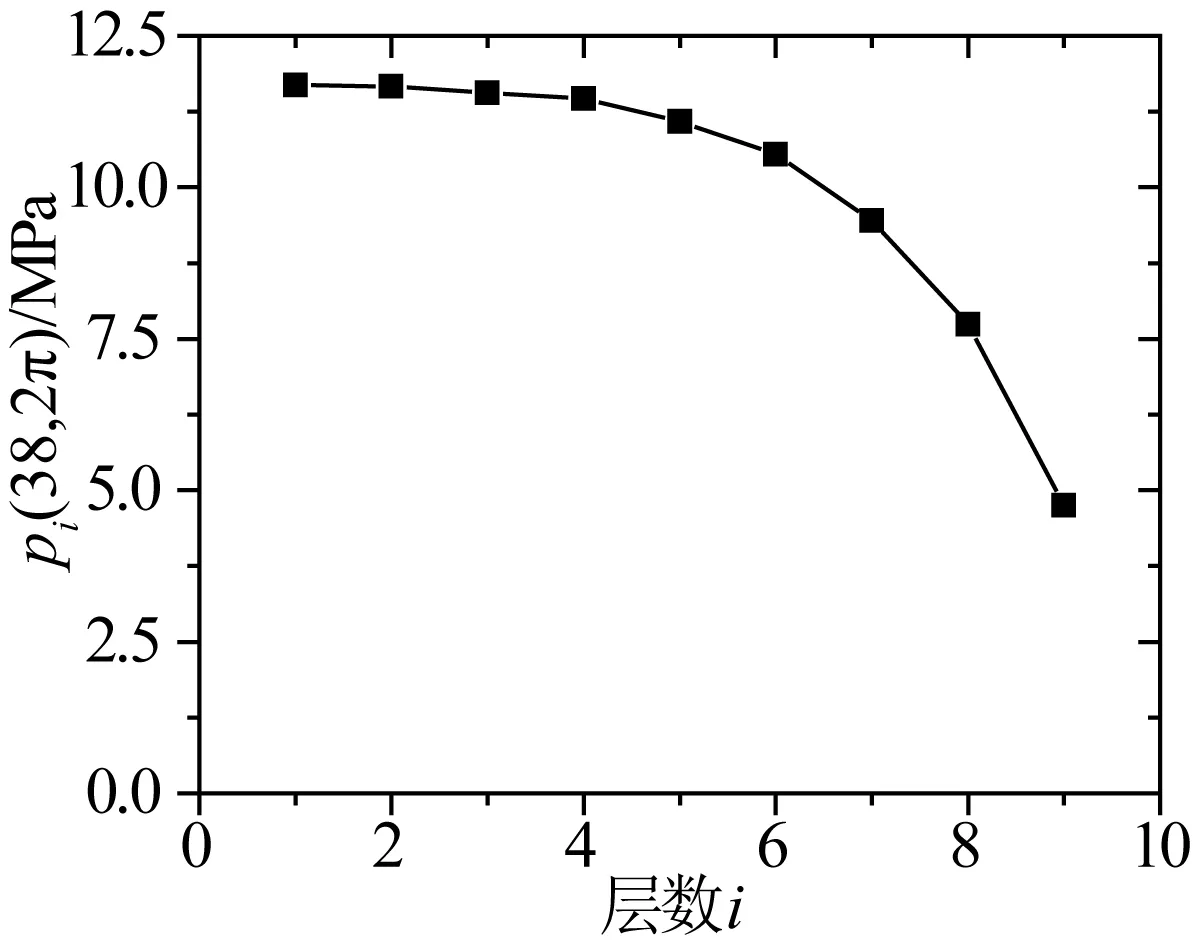
图3 第i层脐带缆内径中间位置的压力密度Fig. 3 Pressure density of umbilical cable’s ith layer at the center of internal diameter
郑刚等[5]在对HW50型液压绞车卷筒进行强度计算的工作中得出了以下结论:卷筒承受的应力从中部往两边逐渐减小,且内表面的应力大于外表面。因此,文中以脐带缆在卷筒中间位置(第38匝的末端,即广义坐标z=38,θ=2π)的受力情况作为校核卷筒强度的依据。
图3给出了第i层脐带缆在卷筒中间位置的压力密度pi(38,2π)的变化趋势。
从图3可以看出,最外层脐带缆对内层脐带缆(或卷筒)的压力随着层数的增加不断减小,最外层脐带缆外径受到的压力为0 MPa,但是这种变化趋势并不是线性的。最靠近卷筒的4层脐带缆对内层脐带缆(或卷筒)的压力相差很小,而第5层之后的脐带缆对内层的压力变化较大。
ROV处于浪溅区的工况计算结果如表1所示。
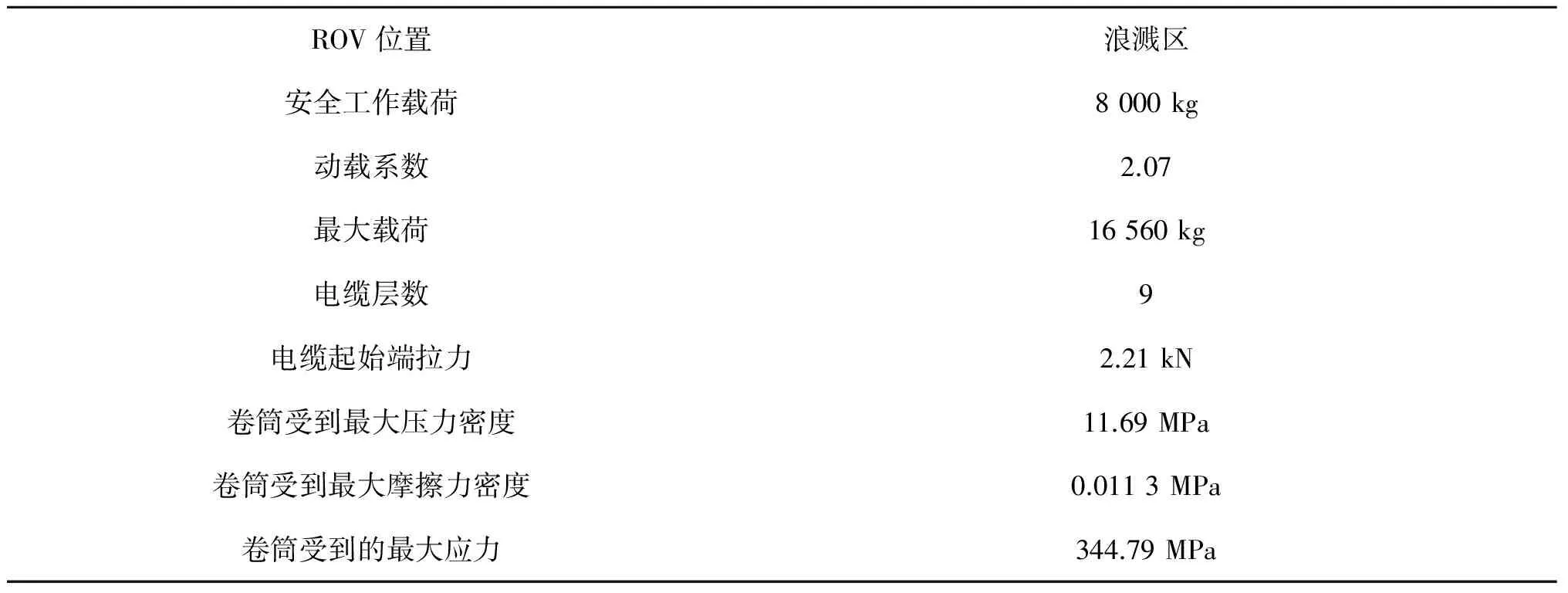
表1 ROV处于浪溅区工况的计算结果Tab. 1 Computing results in wave splashing working condition
根据理论模型的分析结果,采用Q690钢板焊接的绞车卷筒安全系数为1.4,满足使用要求。
该型号ROV最大工作深度在4 000 m左右,由于海浪的溅射,绞车受到的最大载荷在浪溅区,而对于工作深度更大的ROV,脐带缆水中重量大于潜水器空气中重量时,“浪溅区”可能已不是绞车卷筒受力最苛刻点,需要根据实际情况确定ROV绞车的载荷。
3 结 语
针对现阶段对深海ROV脐带缆绞车研究工作的不足,通过分析脐带缆微元段的受力情况,建立了脐带缆轴向拉力关于缠绕角度的微分方程,通过求解该方程,推导了轴向拉力的函数,进而提出了分析绞车卷筒强度的理论方法。通过与文献中实验数据的对比,本文所建立的力学模型得到了验证,通过对实例的计算分析,对某深海ROV脐带缆绞车进行了分析,为设计工作提供了理论支持。
[1] 陈宗恒, 盛堰, 胡波. ROV在海洋科学科考中的发展现状及应用[J]. 科技创新, 2014, 32(21): 3-4.(CHEN Zongheng, SHENG Yan, HU Bo. The developing status and application of ROV in marine scientific research [J]. Technology Innovation and Application, 2014, 32(21): 3-4. (in Chinese))
[2] 程贤福, 吴国栋. 绞车卷筒的强度与稳定性校核准则分析[J]. 煤炭科学技术, 2006, 34(2): 66-68.(CHENG Xianfu, WU Guodong. Analysis on inspection criterion of strength and stability for winch drum [J]. Coal Science and Technology, 2006, 34(2): 66-68. (in Chinese))
[3] 史锡强. 卷取机卷筒受力变形分析及结构改进研究[D]. 长春:东北大学, 2007.(SHI Xiqiang. Stress strain analysis and structure improvement of mandrel of tension reel [D]. Changqun: Northeastern University, 2007. (in Chinese))
[4] 肖汉斌, 程贤福, 陶德馨, 等. 焊接卷筒稳定性计算方法研究[J]. 机械强度, 2000, 22(2): 156-158.(XIAO Hanbin, CHENG Xianfu, TAO Dexin, et al. Calculation method on the stability of welded drums [J]. Journal of Mechanical Strength, 2000, 22(2): 156-158. (in Chinese))
[5] 郑刚, 谢方伟, 王书蒙, 等. HW50型液压绞车卷筒力学特性研究[J]. 机械设计与制造, 2013, 22(5): 15-17.(ZHENG Gang, XIE Fangwei, WANG Shumeng, et al. Mechanical properties of a roller of the HW50 hydraulic winch [J]. Machinery Design & Manufacture, 2013, 22(5): 15-17. (in Chinese))
[6] 高加索, 范吉祥, 刘文娟. 绞车滚筒乱绳原因分析及解决方法[J]. 石油矿场机械, 2010, 39(2): 82-86.(GAO Jiasuo, FAN Jixiang, LIU Wenjuan. Analysis and solution for disorders of wire rope on drawwork drum [J]. Oil Field Equipment, 2010, 39(2): 82-86. (in Chinese))
[7] 陈小星, 赵锦园, 王成. 基于扰动观测器的海洋绞车速度控制研究[J]. 机床与液压, 2012, 40(9): 66-68.(CHEN Xiaoxing, ZHAO Jinyuan, WANG Cheng. Research on speed control of marine winch based on disturbance observer [J]. Machine Tool & Hydraulics, 2012, 40(9): 66-68. (in Chinese))
[8] 江峰, 陈恺恺. 浅析船用被动式恒张力控制液压绞车[J]. 液压气动与密封, 2013, 40(11): 38-40.(JIANG Feng, CHEN Kaikai. Analysis of marine passive constant tension winch [J]. Hydraulics Pneumatics & Seals, 2013, 40(11): 38-40. (in Chinese))
[9] 李明婕, 段梦兰, 叶茂, 等. 深水绞车半主动升沉补偿系统设计及仿真 [J]. 液压与气动, 2014, 32(4): 25-30, 35.(LI Mingjie, DUAN Menglan, YE Mao, et al. Modeling and simulation of integrated heave compensation system for underwater lowering system[J]. Chinese Hydraulics & Pneumatics, 2014, 32(4): 25-30, 35. (in Chinese))
[10] 卢其进, 杨和振. 母船垂荡导致ROV脐带缆参量共振的研究[J]. 海洋技术, 2011, 30(3): 77-81.(LU Qijin,YANG Hezhen. Study on parametric resonances of ROV umbilical under ship heave excitation [J]. Ocean Technology, 2011, 30(3): 77-81. (in Chinese))
[11] 康守权, 张奇峰. 遥控水下机器人脐带缆收放绞车设计及牵引力分析 [J]. 海洋工程, 2010, 28(1): 117-120.(KANG Shouquan,ZHANG Qifeng. Remotely operated vehicle’s cable deploying and retracting winch design and cable traction analyses [J]. The Ocean Engineering, 2010, 28(1): 117-120. (in Chinese))
[12] 陈育喜, 张竺英. 深海ROV脐带缆绞车设计研究[J]. 机械设计与制造, 2010, 32(4): 39-41.(CHEN Yuxi, ZHANG Zhuying. Research on the design of deep-sea ROV umbilical winch [J]. Machinery Design & Manufacture, 2010, 32(4): 39-41. (in Chinese))
[13] POPA M. Forces experienced by winch drums and reels systems as a function of rope characteristics and varying line pull-a theoretical study[C]//Proceedings of 18thNorth Sea Offshore Crane and Lifting Conference. 2013.
[14] DIETZ P, LOHRENGEL A, SCHWARZER T, et al. Problems related to the design of multi layer drums for synthetic and hybrid ropes[C]//Proceedings of OIPEEC Conference/ 3rdInternational Ropedays. 2009.
Mechanical analysis on the multi-layer drum of deep-sea ROV winch
ZHUANG Guangjiao1, WANG Biao1, WU Chao1, CHEN Qiang2, GE Tong1
(1. School of Naval Architecture, Ocean and Civil Engineering, Shanghai Jiao Tong University, Shanghai 200240, China; 2. Xuzhou Truck-Mounted Crane Co., Ltd., Xuzhou 221000, China)
According to the mechanical scheme of the multi-layer drum of deep-sea ROV, the theory which can simulate the mechanical characteristics of deep-sea ROV winch is established based on certain assumption. The theory is validated by comparing the experimental data in literature, and can provide theoretical support for the design of the deep-sea ROV’s winch.
deep-sea ROV; multi-layer drum; winch; mechanical analysis; umbilical cable; stabilily; strength analysis
U664.4; TP242.3
A
10.16483/j.issn.1005-9865.2015.06.013
王 彪。E-mail:biaowang@sjtu.edu.cn
1005-9865(2015)06-095-05
2014-09-13
庄广胶(1986-),男,江苏赣榆人,助理工程师,从事水下机器人技术、深海作业装备技术工作。
E-mail:zhuangguangjiao@126.com