基于下垂控制的并联三相逆变器相位调节方法
2015-10-24李超然刘计龙
李超然,肖 飞,刘计龙,陈 伟
(1. 海军工程大学舰船综合电力技术国防科技重点实验室,武汉430033;2. 西安交通大学电气工程学院,西安710049)
基于下垂控制的并联三相逆变器相位调节方法
李超然1,肖飞1,刘计龙2,陈伟1
(1. 海军工程大学舰船综合电力技术国防科技重点实验室,武汉430033;2. 西安交通大学电气工程学院,西安710049)
研究无互联线三相逆变器并联控制技术,针对传统下垂控制对于三相逆变器并联系统电压相位差调节的不足,提出一种在下垂控制的基础上引入相位调节环的并联三相逆变器相位调节方法。该相位调节环对并联系统电压相位进行检测,并直接实施同步调节,减小并联系统的相位差从而减小并联冲击。分析了下垂控制的原理以及并联系统相位差的产生原因,介绍了改进后的下垂控制的拓扑结构图以及工作方法。通过搭建两模块并联三相逆变器实验平台验证了该方法的正确性和有效性。
逆变器并联控制下垂控制相位调节环
0 引言
随着逆变电源在大容量供电系统中的广泛使用,三相逆变器冗余并联控制技术在现代工业中使用越来越频繁。无互联线逆变器并联控制技术是其中一种广泛采用的并联控制技术[1-7],这种并联控制只通过交流母线连接并联系统的各模块,减少了外界干扰的影响,较大程度提高了并联系统的冗余性和可靠性[8]。无互联线逆变器并联控制技术利用三相逆变器输出下垂特性,分别通过有功功率和无功功率对输出电压相位和幅值进行调节,实现并联系统各模块输出电压的频率、相位和幅值的平衡[9-11]。在传统的下垂控制相位调节方式中,需要以固定周期计算三相逆变器每一
工频周期中的输出有功和无功功率,因此存在动态响应慢和周期性调节的固有缺点。文献[12]提出一种新的软件锁相环控制方案,采用DSP的捕获功能和改变计时器的周期值来实现并联系统相位和频率的跟踪,但实现起来较为复杂。
本文提出了一种在传统下垂控制基础上引入相位调节环的相位调节方法。当三相逆变器并联系统输出电压的相位差超过设定的某个限定值时,相位调节环就在三相逆变器输出电压的相位上引入一个调节值,使相位差迅速减小到合适的范围内,从而减小并联时刻的冲击。最后,本文搭建了一个两模块并联三相逆变器实验平台,验证了本方案的可行性。
1 三相逆变器并联系统分析
1.1下垂控制原理
两台三相逆变器并联拓扑结构如图1所示,其中E1∠θ1,E2∠θ2,i1,i2分别对应两台并联三相逆变器的输出电压和输出电流。Uo∠0°为母线电压,io为负载电流,jX1+r1,jX2+r2分别为两台三相逆变器线路阻抗与输出阻抗之和。iH为互联模块间的环流大小,方向定义为从三相逆变器1流向三相逆变器2。
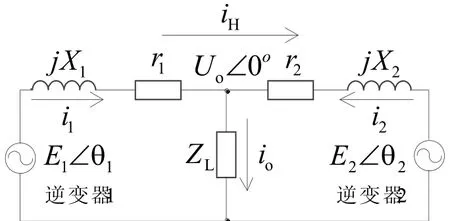
图1 两台三相逆变并职等效模型
由图1可推导出两台并联三相逆变器的有功功率P1与P2和无功功率Q1与Q2表达式为:
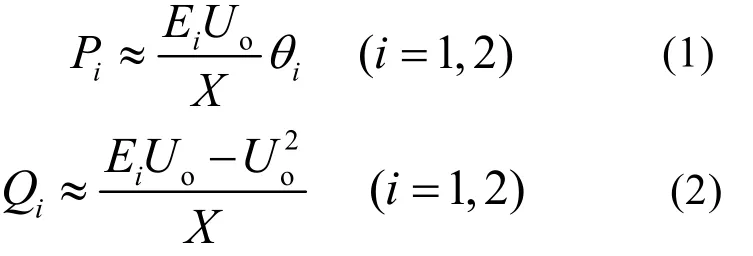
由式(1)和式(2)可以看出相位差和幅值差分别对三相逆变器的无功功率Q和有功功率P有影响。
在三相逆变器并联系统中,输出电压之间的相位差很小,很难精确地通过控制相位来实现有功功率的调整,一般按照式(3)利用频率与相位的关系,通过控制三相逆变器输出电压的频率间接对三相逆变器输出电压的相位进行调整,实现对三相逆变器输出有功功率的调整。

因此推导出下垂控制的控制方程为

其中fn为三相逆变器空载时输出电压频率的基准值,Un为三相逆变器空载时输出电压幅值的基准值;kp为有功频率下垂系数、kq为无功幅值下垂系数;fi为三相逆变器带载时输出电压频率的参考值,Ui为三相逆变器带载时输出电压幅值的参考值。通过下垂控制,两台并联三相逆变器运行一段时间后,输出电压的幅值与相位将趋于一致。
1.2联系统的相位差
在三相逆变器并联系统中,因为下垂控制的作用,母线电压的相位就是在线工作的三相逆变器输出电压的相位,而在线工作的三相逆变器和离线待机的三相逆变器因为帯载情况的不同将导致输出电压频率的不同。不同频率的正弦波间会出现相对偏移的现象,产生相位差。如图2所示,某一时刻在线工作的三相逆变器和离线待机的三相逆变器输出电压的相位重合,此时两者相位差为0,由于帯载情况的不同导致输出电压频率的不同,经过一段时间后两者间会出现偏移错位,引起了三相逆变器并联系统的相位差。
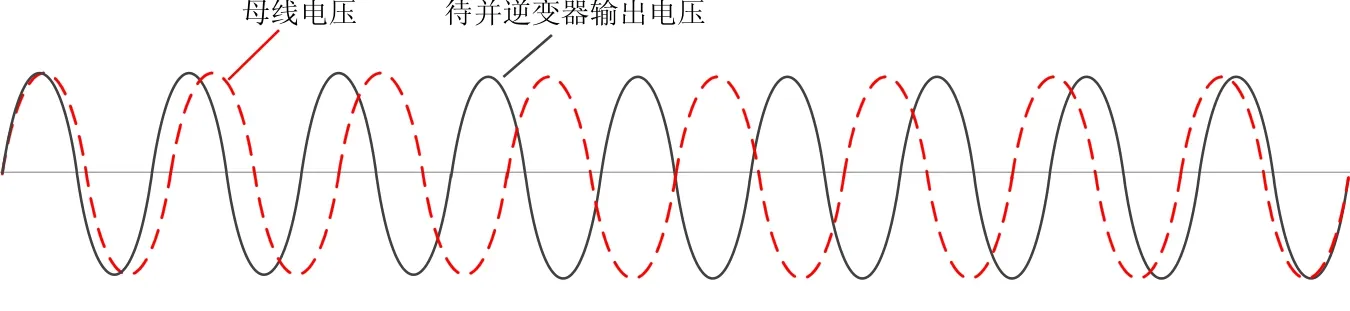
图2 待并三相逆变器输出电压与母线电压的相位关系
在线工作的三相逆变器输出电压的相位θ1和离线待机的三相逆变器输出电压的相位为θ2的表达式如式(5)所示。
当并联系统的输出电压相位差满足式(6)时,三相逆变器系统可以实现并联。其中Δθ为三相逆变器并联系统的相位差,σ为三相逆变器可实现并联的相位差阈值。

2 一种引入相位调节环的下垂控制方式
为了尽快将逆变器并联系统输出电压的相位差缩小到阈值以下,减小并联时刻的冲击和并联系统的环流,本文在传统下垂控制的基础上引入了相位调节环。当并联系统的相位差超过某个预定值σ时,在三相逆变器输出电压的相位上引入一个固定值ε,保证并联系统的相位差能够控制在较小的范围内。经过改进后的下垂控制方式拓扑结构如图3所示,主要分为两个部分:①内层电压电流双环PI下垂控制环;②外层相位调节环。
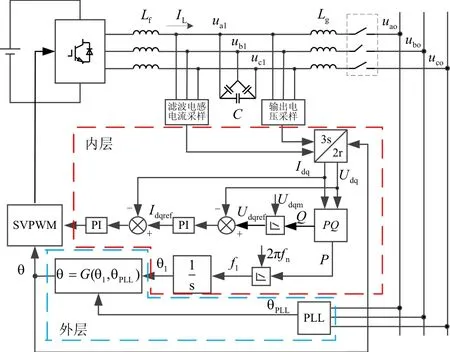
图3 改进的三相逆变器下垂控制方式
2.1流双环PI下垂控制环
采样得到的滤波电感电流采样和输出电压采样经过旋转坐标变换后得到d、q轴分量,经过PQ计算得到三相逆变器的有功功率和无功功率,经过下垂调节后得到电压外环的参考值Udqref和输出电压的频率f1。电压外环参考值与d、q轴的输出电压Udq的误差经过PI调节后得到电流内环的参考值Idqref,电流内环的参考值Idqref与d、q轴的电感电流误差经过PI调节后经过空间矢量控制后得到用于驱动三相逆变器的驱动信号。经过下垂控制后得到的三相逆变器的输出频率f1经过积分后得到相位θ1.,其在相位调节环的作用下得到三相逆变器的输出电压相位θ。
2.2节环
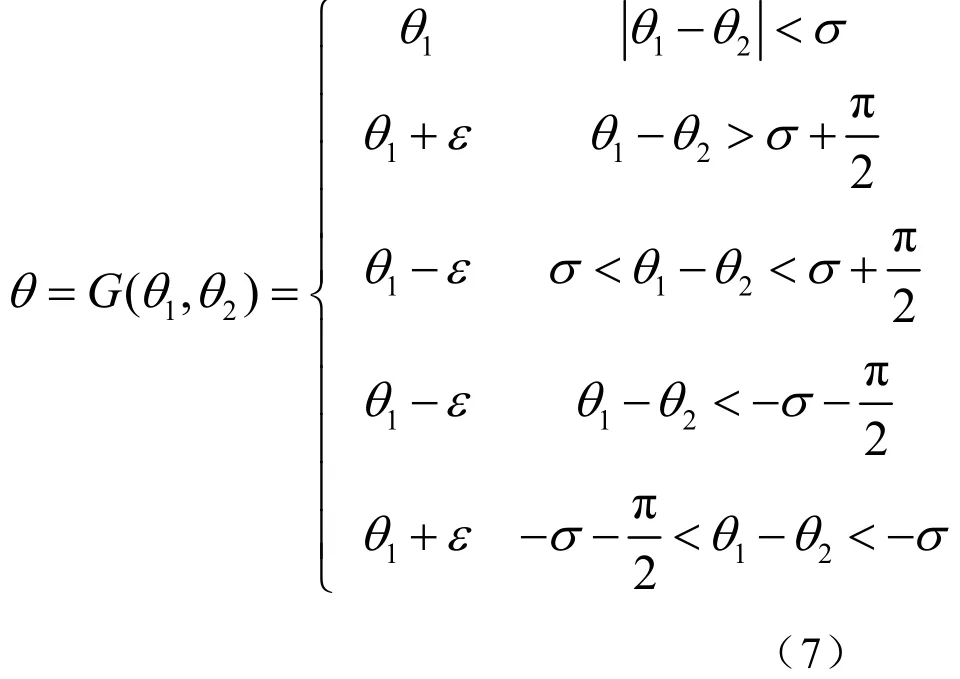
经过电压电流双环PI下垂控制得到的三相逆变器的输出电压相位θ1和在线工作的三相逆变器的输出电压相位θ2范围都是[0,2π],两者的相位关系存在五种情形,如图4所示。为了保证三相逆变器并联系统的相位能够以最快的速度趋近,相位θ1的移动方向在以下五种情形中各有不同,定义向左移动为ε,向右移动为-ε。

图4 母线电压与待并三相逆变器输出电压的五种相位情况
由图4可以得到经过相位调节环调节后的三相逆变器输出电压的相位的表达式
3 实验结果
为验证本文所提出的方法,实验设计了两台原理样机,其主要性能参数如表1所示,所接负载为三相电阻负载,连接方式为星型并联方式。两台三相逆变器并联运行其中一台退出时,输出电压与电流的波形如图5所示。从图5可以看出,某时刻其中一台三相逆变器退出系统时,两台三相逆变器的电压与电流立刻产生动态响应,调整之后输出的波形质量较高。退出系统后的三相逆变器将处于空载状态,而未退出系统的三相逆变器将处于带载状态,负载的不同必然导致两者输出电压频率的差异,但图5中输出电压u1和u2两者的波形基本吻合,说明采用该方法后,三相逆变器退出运行后仍然能够较好地跟踪母线电压。
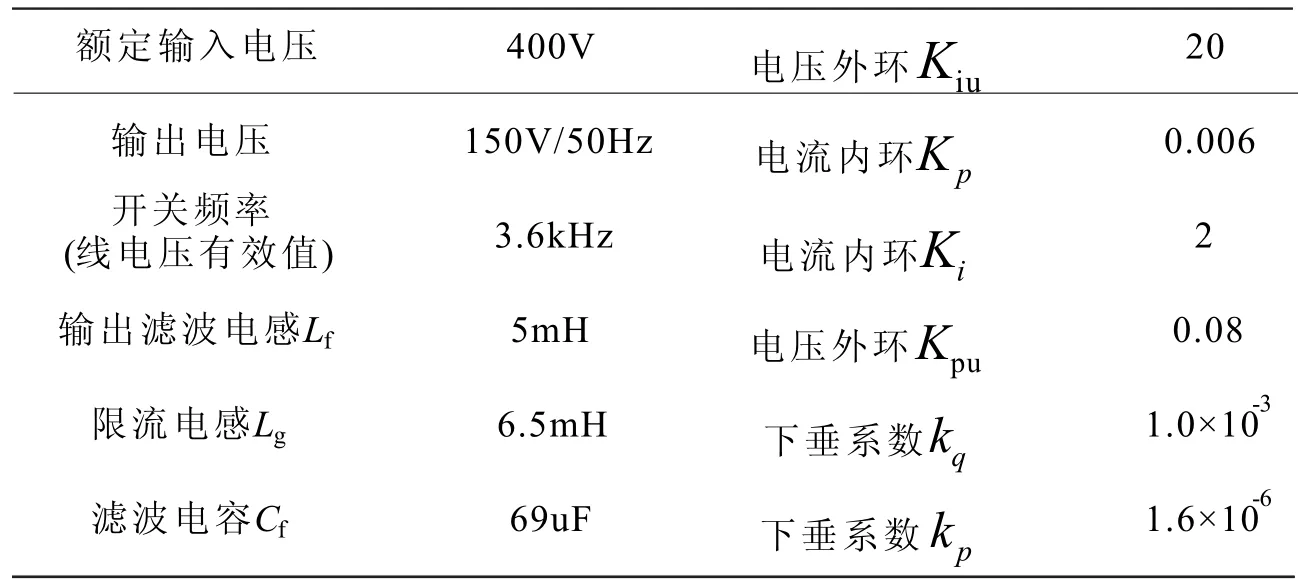
表1 三相逆变器原理样机主要性能参数表
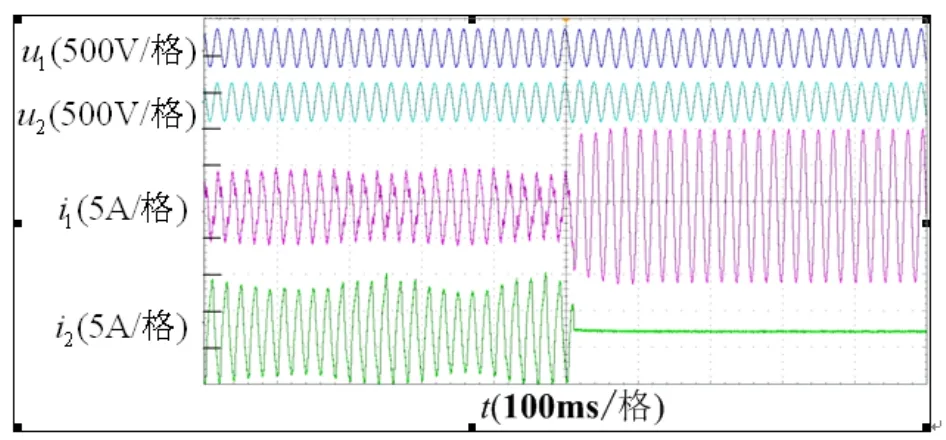
图5 两台三相逆变器并职运行时,其中一台退出运行
一台三相逆变器运行时另一台三相逆变器并入系统时,输出电压与电流的波形如图6所示。从图6可以看出,某时刻另外一台三相逆变器并入系统时,两台三相逆变器立刻动态响应,经过很短时间后能够输出较为稳定的波形且输出电压u1和u2两者的波形基本吻合。说明采用该方法后,三相逆变器系统可以较好地实现并联,且对其它三相逆变器基本无影响,拥有良好的热并机性能。
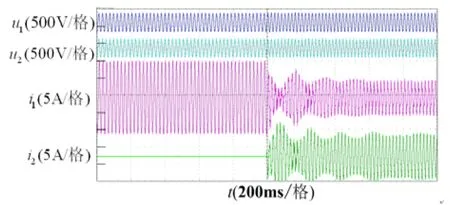
图6 一台三相逆变器运行时,另一台三相逆变器投入运行
并联的两台三相逆变器稳定运行时,输出电压与电流的波形如图7所示。由图7中的波形可以看出,输出电压u1和u2基本吻合且波形质量较好,而输出电流i1和i2存在抖动。其主要原因在于系统的开关频率较低,锁相环的精度不够,无法精确控制两台并联三相逆变器输出电压之间的相位差,导致并联回路之中产生环流,对输出电流造成了影响。
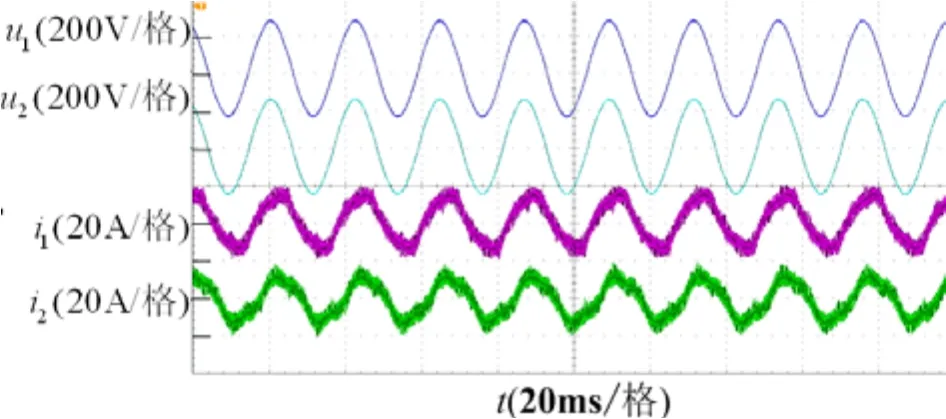
图7 两台三相逆变器并职运行时稳态波形
4 结论
本文提出了一种引入相位调节环的改进下垂控制方法,并通过搭建一个两模块并联三相逆变器实验平台,验证了本方案的可行性。由实验结果可见,本方法能够较好地实现并联下垂控制,提高了系统的动态响应能力和稳定性。
[1] 路嘉鑫,张颖超,钱希森等. 三相逆变器无线并联虚拟阻抗分析[J]. 电源学报,2014,01:54-60.
[2] Dipankar D,Ramanarayanan V.Decentralized prallel oeration of iverters saring ub alanced and nnlinear lads[J].IEEE Transactions on Power Electronics,2010,25(12):3015-3025.
[3] Ming Hua,Haibing Hu,Yan Xing,et al.Multilayer control f or inverters in parallel operation w ithout signal interconnection[C].IEEEI ECON2011,Melbourne,Australia,2011:3180-3185.
[4] He Z,Xing Y.Distributed control for UPS modules in parallel operation with RMS voltage regulation[J].IEEE T ransactions on Industrial Electronics,2008,55(8):2860-2869.
[5] Josep M G,Vicuña L G,Matas J,et al.Wireless-control strategy for parallel operation of distributed-generation inverters[J].IEEE Transactions on Industrial Electronics,2006,53(5):1461-1470.
[6] 阚加荣,谢少军,吴云亚.无互联线并联三相逆变器的功率解耦控制策略[J].中国电机工程学报,2008,28(21):40-45.
[7] 阚加荣.单相三相逆变器无互联线并联控制技术研究[D].南京:南京航空航天大学,2007.
[8] 姜凤华,丁喆,张虎等.基于DSP的逆变电源并联运行控制技术的研究[J].通信电源技术,2008,25(4):20-23.
[9] 郭忠南,张纯江,孟晓脉. 基于可变虚拟阻抗的接口三相逆变器改进下垂控制[J]. 电源学报,2014,06:66-72.
[10] 华明,胡海兵,邢岩.三相逆变器多层控制无线并联技术[J].中国电机工程学报,2011,31(36):33-39.
[11] 姚玮,陈敏,陈晶晶.一种用于无互连线三相逆变器并联的多环控制方法[J].电工技术学报,2008,23(1):84-89.
[12] 阚加荣,谢少军.无互联线三相逆变器并联系统中数字锁相环的设计[J].电力电子技术,2007,41(4):37-39.
Phase Adjustment Method of Parallel Three-phase Inverter with Droop Control
Li Chaoran1,Xiao Fei1,Liu Jilong2,Chen Wei1
(1. National Key Laboratory for Vessel Integrated Power System Technology,Naval University of Engineering,Wuhan 430033,China; 2. School of Electrical Engineering,Xian Jiaotong University,Xian 710049,China)
In order to cope with drawbacks of conventional droop method,a phase-adjustment method of parallel three-phase inverter with droop control is proposed. Adding the phase-adjustment loop to the droop voltage-current double loop PI control can ensure all parallel inverters keep the similar phase with each other. The principle of droop control and causes of phase difference in the process of the parallel connection are analyzed,the topology of droop-multilayer control phase-adjustment loop circuit is given,and the working principle of phase-adjustment loop is introduced. By constructing parallel three-phase inverter experimental platform,the experimental results verify that the proposed method is effective for inverter to incorporate in AC bus.
inverter; parallel control; droop control ; phase-adjustment loop
TM464
A
1003-4862(2015)09-0011-04
2015-05-09
李超然(1992-),男,硕士研究生.研究方向:电力电子与电力传动。