基于最小二乘法的车型点云拼接
2015-10-21陈志
陈志
一、引言
三维点云数据拼接技术一直是逆向工程、计算机视觉、模式识别、曲面质量检测及摄影测量学等领域的研究热点与难点。为了得到被测物体完整的点云数据,需要从多个角度对物体进行扫描处理,测量设备需要从不同视角对物体进行多次定位测量,然后对各个不同视角测得的点云数据进行多视拼接,统一到一个全局坐标系下,即点云拼接问题。
三维点云拼接技术在不同场合亦被称为重定位、配准或拼合技术,其实质是把不同的坐标系下测得的数据点云进行坐标变换,问题的关键是坐标变换参数R(旋转矩阵)和t(平移矢量)的求取。目前国内外的拼接技术一般分两步:粗拼接和精确拼接。粗拼接大致将不同坐标系下点云对准到同一坐标系下,常用的方法有转台法,标签法和曲面特征法等。一般粗拼接很难满足精度要求,需在粗拼接的基础上使用迭代算法进行精确拼接,使点云之间的拼接误差达到最小。目前国最常用的精确拼接方法其本质都是基于最小二乘法。
二、最小二乘法点云数据拼接原理
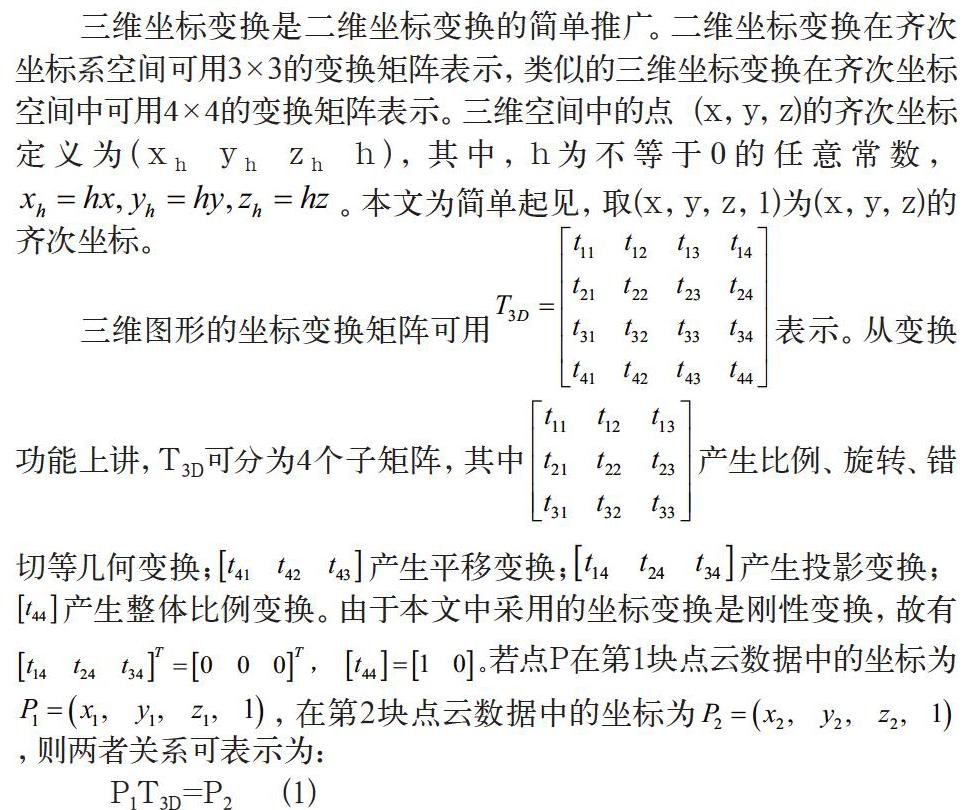
2.1三維坐标变换
三维坐标变换是二维坐标变换的简单推广。二维坐标变换在齐次坐标系空间可用3×3的变换矩阵表示,类似的三维坐标变换在齐次坐标空间中可用4×4的变换矩阵表示。三维空间中的点 (x,y,z)的齐次坐标定义为(xh yh zh h),其中,h为不等于0的任意常数,。本文为简单起见,取(x,y,z,1)为(x,y,z)的齐次坐标。
三维图形的坐标变换矩阵可用表示。从变换功能上讲,T3D可分为4个子矩阵,其中产生比例、旋转、错切等几何变换;产生平移变换;产生投影变换;产生整体比例变换。由于本文中采用的坐标变换是刚性变换,故有若点P在第1块点云数据中的坐标为 ,在第2块点云数据中的坐标为,则两者关系可表示为:
且的极小最小二乘解唯一,即为,其中A+是A的广义逆。由于将这几个解合并所得满足式(3),并可使得最小二乘目标函数G最小,所以。
2.4拼接算法
点云数据基于最小二乘法的拼接算法步骤如下:
1)在点云数据中,根据标志点的空间拓扑关系由程序自动找出对应标志点对,若标志点对大于3对,则将其分别存入矩阵A、B,否则不能进行拼接;
2)根据求出T3D,其中,;
3)将点云数据经过T3D坐标变换,加入另一块点云数据中;
4)消除重叠点,拼接结束。
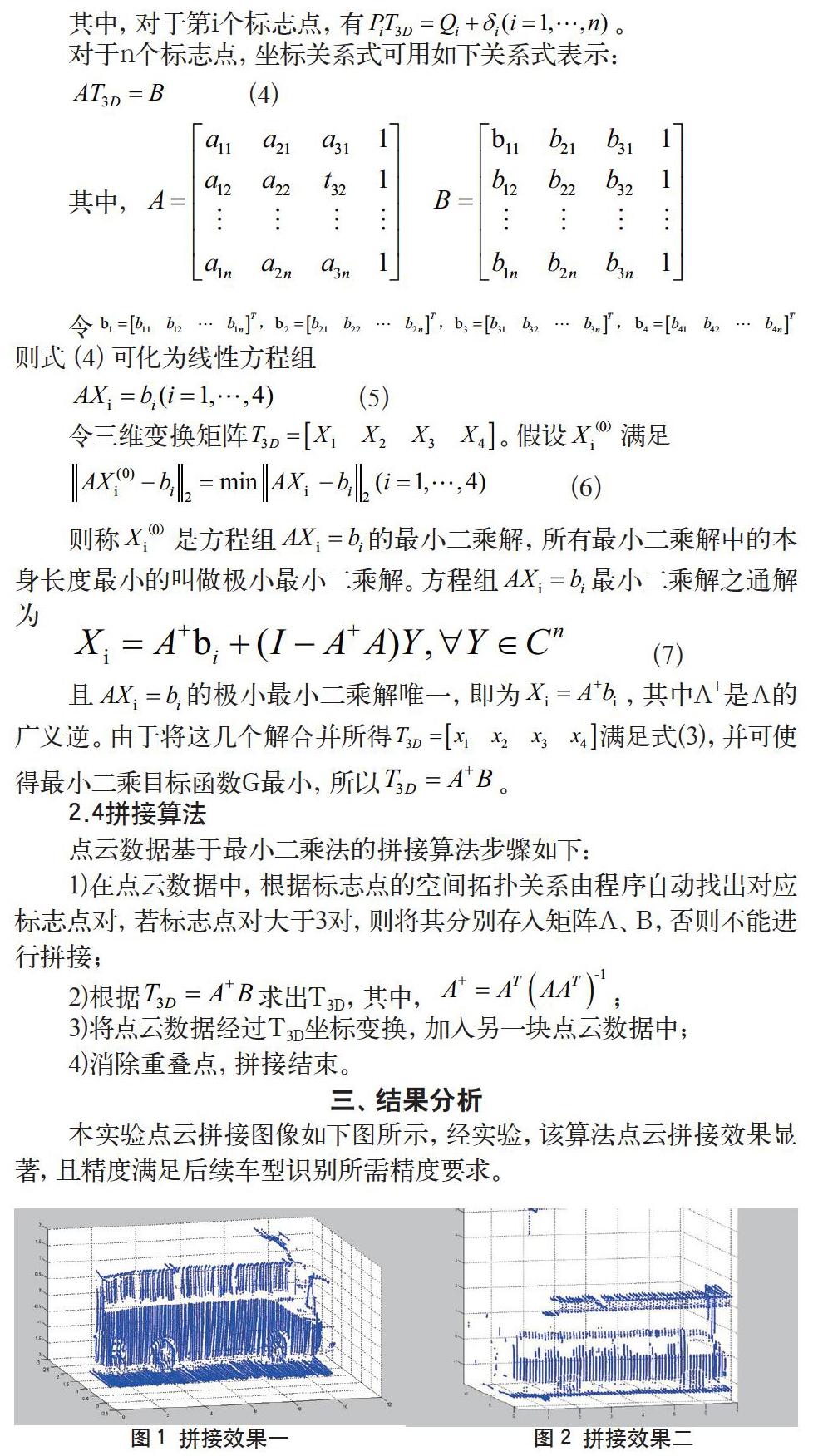
三、结果分析
本实验点云拼接图像如下图所示,经实验,该算法点云拼接效果显著,且精度满足后续车型识别所需精度要求。
