农用伺服电机的新颖在线死区补偿方法
2015-10-21孙正海王剑平杨晓红等
孙正海 王剑平 杨晓红等

摘要對SVPWM伺服系统死区效应及在线死区补偿方法进行了探讨。常用的平均死区时间补偿技术是根据参考电压伏秒面积等于补偿后伏秒面积原则,由于难以准确地得到电流的极性所以可能出现误补偿。该文在分析了死区效应对输出电压电流影响的基础上,提出了一种低成本的死区补偿方法。并通过将相电流进行旋转坐标变换计算电流矢量角,间接判断电流极性准确的求出了电流的过零点,从而得到较好的补偿效果。最后在基于TMS320F2812研发的伺服驱动器上测试软件,结果证明了该方法的正确性,有效地减小了死区时间造成的电流畸变并使零电流箝位现象得到明显改善。
关键词死区补偿;在线测量;零电流箝位;伺服系统
中图分类号S22文献标识码A文章编号0517-6611(2015)31-340-04
Online Novel Deadtime Compensation Method of Agricultural Servo Motor
SUN Zhenghai, WANG Jianping*, YANG Xiaohong et al
(College of Information Engineering and Automation, Kunming University of Science and Technology, Kunming, Yunnan 650500)
Abstract The deadtime effect of SVPWM servo system and online deadtime compensation method was discussed. Common average deadtime compensation is based on the principle that the voltsecond area of reference voltage equals to the voltsecond area after compensation. It is difficult to obtain accurate polarity of the current, so error compensation may appear. After analyzing the dead zone effect on the output voltage and current influence, this article proposes a lowcost method of deadtime compensation. And by the phase current rotating coordinate transformation to calculate the current vector angle, indirectly determining the current polarity, it can accurately calculate current zero crossings and obtain better compensation effect. Finally, based on TMS320F2812 developed low pressure servo drive test software. It proves the correctness of the method which effectively reduces the dead time caused by the current distortion and zerocurrent clamping phenomenon has been significantly improved.
Key words Deadtime compensation; Online measurement; Zerocurrent clamp; Servo system
目前伺服电机在农业方面的应用越来越广泛,而对于理想的农业伺服电机功率器件而言,门级驱动信号应该是互补的。但是对于实际的功率器件而言,为了防止上下桥臂的开关直通,两个开关需要加入一段死区时间,正是这段空白时间使得输出电压和实际给定电压之间存在误差。而每个斩波周期内引起的微小畸变积累起来就会造成严重的波形失真和基波电压降。随着开关频率的增大,电压失真和谐波成分也越大。由死区时间造成的死区效应会使输出电压电流畸变,出现零电流箝位现象以及转矩、转速脉动,严重影响了伺服驱动器的性能[1-3]。如果不对这部分进行补偿,可能会造成电压不稳定和额外的机械损耗。
目前,国内外学者提出的关于死区时间补偿方法中,最主要是基于平均值理论的补偿技术[4-7]和基于脉冲的补偿方法[8-9]。基于平均值理论的补偿技术将由于死区效应减少的电压平均到整个周期里,并且补偿到矢量指令电压里,这种方法的难点在于准确的获得电流的极性,避免误补偿。基于脉冲补偿法虽然可以获得一个较好的补偿效果,但是在每个斩波周期里占用的采样过程较长。目前,国内驱动器所用芯片RAM资源有限,因此,在功能性程序占用了大量资源的情况下,这种方法不是一种很好的解决方案。而其他的一些方法要么需要额外增加硬件设备,要么控制算法复杂占用了过多的系统资源[10-11]。
该文提出了一种新型死区补偿方法,并且通过对电流进行旋转坐标变换和其矢量角的应用,从而间接判断电流极性。这种方法易加入到现有的伺服驱动器中,无需增加额外的硬件设备,只需添加少量代码。目前已经成功应用于研发的低压伺服驱动器,并取得了很好的效果。
1死区效应
国内目前的驱动器产品,一般是将死区时间配置成上升沿延时导通。现以三相电压型逆变器的A相进行分析,如图1。调制信号和载波信号相互比较后产生理想的门级驱动信号。由于死区时间的加入,上下桥臂的功率开关在这期间都处于阻断的状态。
从图2(d)、(e)的时序可以看出,死区时间造成了实际输出电压和给定电压之间的误差,在ia>0时缺少了宽度为ts的电压脉冲,在ia<0时多出宽度为ts的电压脉冲。在开关频率不变的情况下,这个误差随死区时间的增大而增加。使得输出电压基波幅值减小,并产生了与死区时间和载波比成奇数次的谐波,在低速时尤为明显。
2死区补偿方法
采用一种新颖的死区补偿方法,能有效改善由死区效应造成的影响。仍以A相来分析。当ia>0,上桥臂K1和续流二极管D2交替导通,无论K2是否有门级使能信号,都处于关断状态,此时K2是不控桥臂;同理当ia<0 时,K2和续流二极管D1交替导通,无论K1是否有门级驱动器信号,都处于关断状态,此时K1是不控桥臂。
这里采用一种改进的死区时间配置方法,原理如图3所示。其中(a)图为A相上下功率开关管的理想驱动信号;当ia>0时,不对K1设置死区时间,确保其有准确的开断时间,而提前ts给K2关断信号,并延时ts给开通信号,如图3(b);当ia<0时,不对下管K2设置死区时间,确保其有准确的开断时间,而延时给K1开通信号,并提前给关断信号,如图3(c)。
图3(d)为理想输出电压,图3(e)为实际输出电压。可见采用上述死区补偿方法后,实际输出电压与理想输出电压一致,从而避免了死区效应给输出电压带来的影响。
3电流极性判断
准确的判断出相电流过零点对死区补偿来说至关重要。现有实际应用技术当中大多通过硬件AD采样相电流的方法判断电流极性。这样得到的相电流谐波含量很高,易造成误补偿;同时由于噪声干扰和零电流钳位现象的影响,在过零点的附近会出现多个过零点,因此难以获得真实的电流过零点。若采用直接对采样电流进行滤波又会使获得的电流信号大大滞后,降低了系统的响应和电流环带宽。
将相电流转换到同步旋转dq坐标系下,经过低通滤波器将高频成分滤掉后,利用变换后的值来计算电流矢量的空间位置角,如图4所示。θ为定子角频率ω的积分角,φ是电流矢量与d轴的夹角由式(1)而定。isq和isd分别是经过滤波后的值。由式(2)可以得到电流矢量的空间绝对位置角θs。通过这种间接定位的方式增加了判断电流极性的精度。
φ=sin-1(isq/isd)(1)
θs=θ+φ(2)
如图5所示,电流空间矢量扇区分为6个区域。类似于电压空间矢量,通过电流矢量所在扇区就能获得到电流极性。当其经过相邻区间的时候即是其中一相的过零点。
4试验平台
为测试上述改进型死区补偿算法的有效性和可行性,通过软件仿真并移植到现已研发的低压伺服驱动器上进行测试分析。该测试平台是基于TI公司TMS320F2812作为主控芯片研发的三闭环SVPWM低压伺服系统。功率器件采用IRF540N,通过IR2106S模块进行驱动。电流以200 mΩ电阻采样,经过信号调理电路送至DSP。软件系统主要架构包括:内部电流环PI控制器,电流给定陷波滤波器;速度环PI控制器,反馈二阶滤波器,加速度前馈控制器;位置环P控制器,位置前馈控制以及位置指令平滑滤波等部分。具有外部脉冲模式,内部位置、速度模式等。同时开发了上位机软件监控运行参数,可以更方便直观地进行测试。在一台400 W电机上进行试验,具体电机参数见表2。
5测试结果与分析
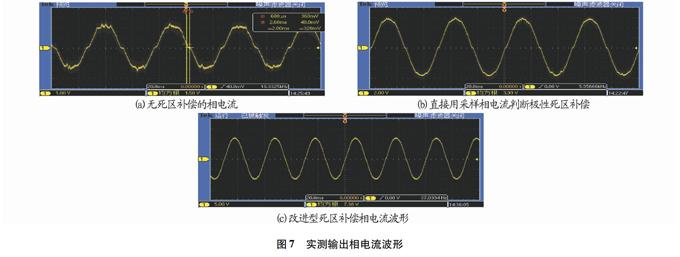
DSP中功率开关死区时间配置为3.3us,斩波周期为01 ms,电流环带宽最大1.5 kHz。在保证三环系统参数相同的情况下,分别测试了以下3种情况的相电流波形:无死区补偿;直接用三相电流采样值判断极性的死区补偿;以及改进型死区补偿。通过将电流环的给定参考信号设置为不同幅值和频率的正弦波,同时监控上位机和示波器上的反馈相电流波形来观察其正弦性和跟随性,如图6、7所示。
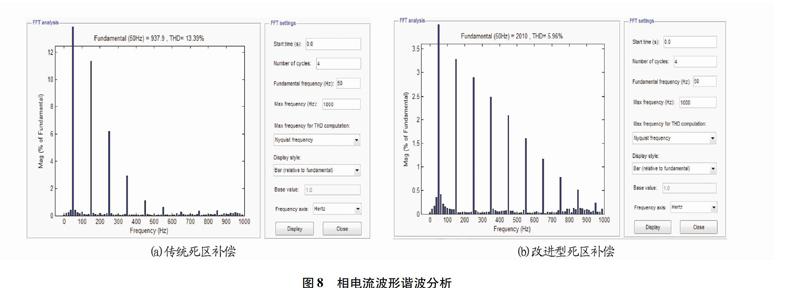
从图6(a)和图7(a)中可以看出(电流钳×100档),由于死区效应的影响,电流波形畸变明显。尤其零电流钳位现象使电流过零附近出现严重畸变。同时在波峰和波谷的位置均发生波形失真。图6(b)和图7(b)所示传统死区补偿的结果仍然存在较大的谐波。当加入改进型死区补偿之后如图6(c)和图7(c),电流波形得到很大改善,零电流钳位几乎消失 。传统补偿方法相电流谐波畸变率为13.39%,而改进后谐波畸变率明显降低只有5.96%,如图8所示。
6结论
首先分析了死区效应产生的原因和影响。然后针对农业伺服驱动器提出了一种新的死区时间配置方法,有效的利用了不可控开关,保持有效桥臂开断时间准确等于理想时间。提出通过计算电流矢量角来间接判断电流过零点的方法,有效的避免了直接检测电流极性带来的误差,提高了判断的精度。这种死区补偿方法不需要增加硬件设备,只需要增加少量代码就可实现,可移植性强,降低系统成本。经过试验证明该方法具有很好的效果,并已經成功的应用在开发的伺服驱动器上。
参考文献
[1] 李洪亮,许奔,贺诚,等.死区补偿零电流箝位现象的研究[J].电测与仪表,2013(2):121-124.
[2] 胡渊,蒋锐,韩淳.SVPWM逆变控制的死区补偿策略[J].电气技术,2011(3):1-3.
[3] 杨武盖.基于死区补偿的电机低速运行稳定性研究[J].微电机,2014(11):67-71.
[4] BOSE B K.Power electronics and variable frequency drives[M].New York:IEEE Press,1996.
[5] 程小猛,陆海峰,瞿文龙,等.用于逆变器死区补偿的空间矢量脉宽调制策略[J].清华大学学报(自然科学版),2008(7):1077-1080.
[6] 高旭东,秦进平.一种新颖的SVPWM死区补偿方法[J].哈尔滨理工大学学报,2013(1):99-103.
[7] 圣立明,毕淑娥,何强.基于数字信号处理器的异步电机控制系统的死区补偿[J].电机与控制应用,2010(11):32-35.
[8] 孙向东,钟彦儒,任碧莹,等.一种新颖的死区补偿时间测量方法[J].中国电机工程学报,2003(2):107-111.
[9] 胡庆波,吕征宇.一种新颖的基于空间矢量PWM的死区补偿方法[J].中国电机工程学报,2005(3):15-19.
[10] 杨荣峰,陈伟,于泳,等.自适应滤波在电流矢量死区补偿方法中的应用[J].电工技术学报,2009(7):65-69.
[11] 杨荣峰,陈伟,于泳,等.自适应滤波在电流矢量死区补偿方法中的应用[J].电力电子,2008(4):36-39.
